

A General Purpose Robotic Hand Exoskeleton With Series Elastic Actuation
- PMID: 33912323
- PMCID: PMC8078844
- DOI: 10.1115/1.4044543
A General Purpose Robotic Hand Exoskeleton With Series Elastic Actuation
Abstract
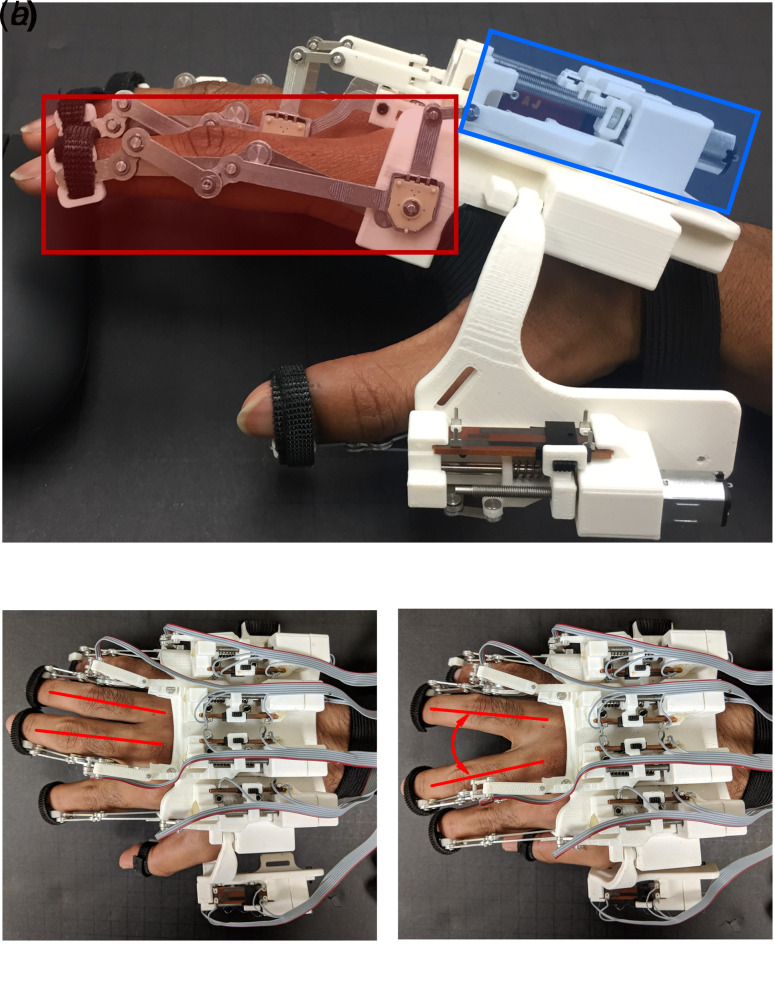
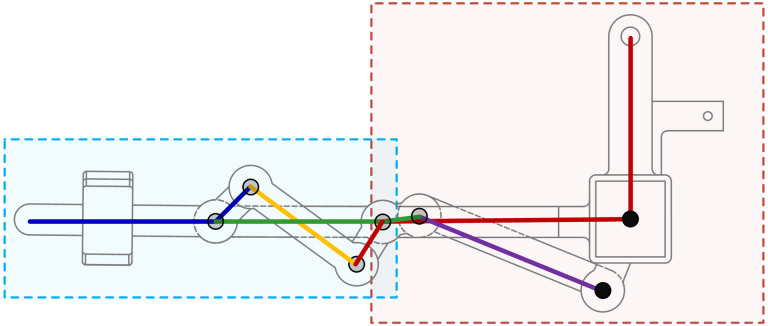
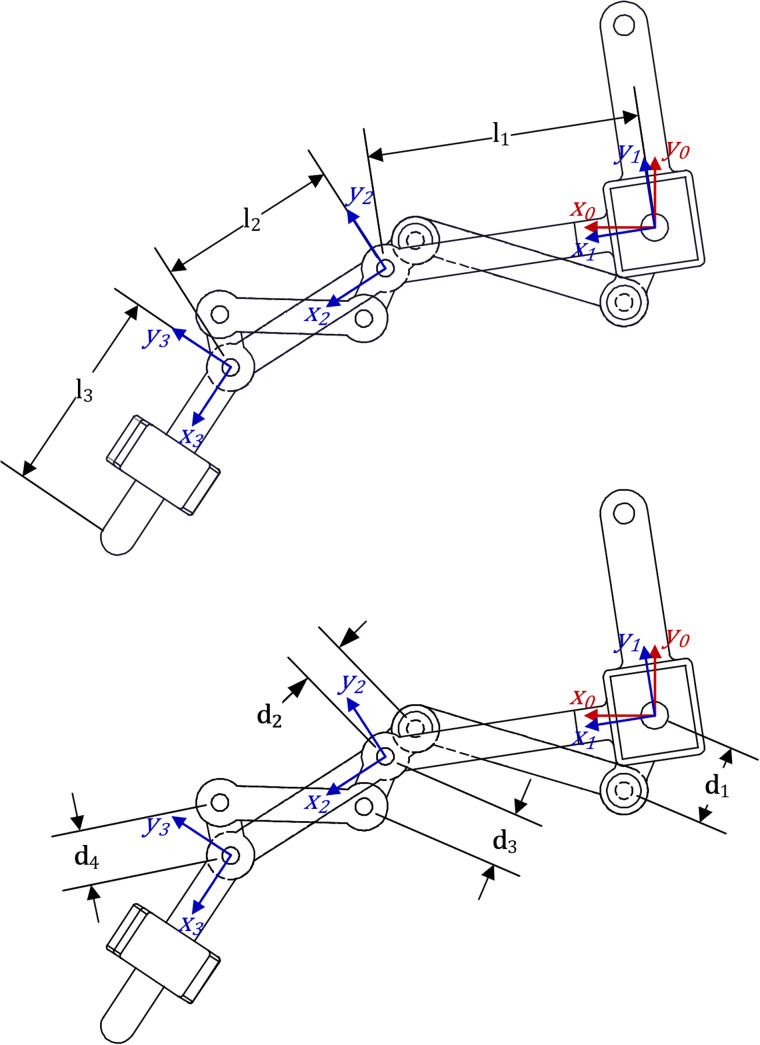
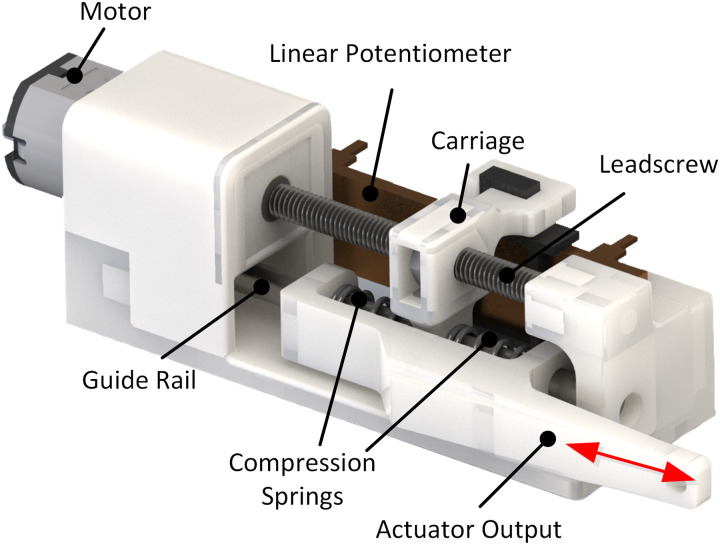
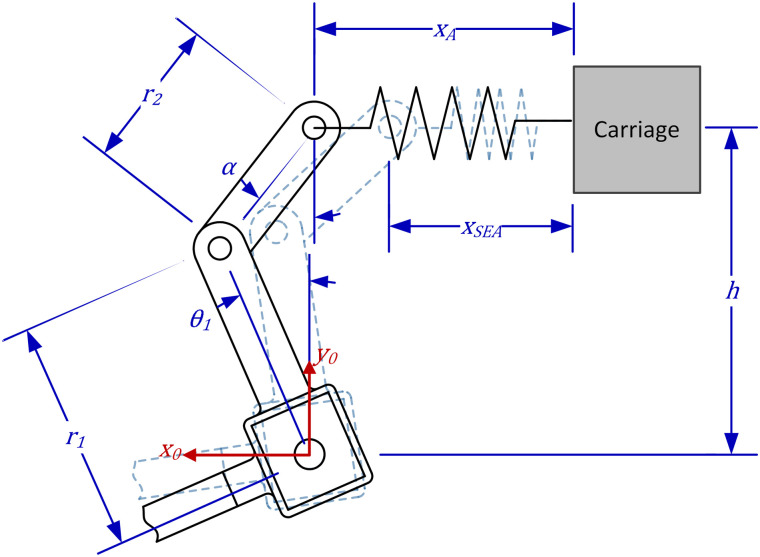
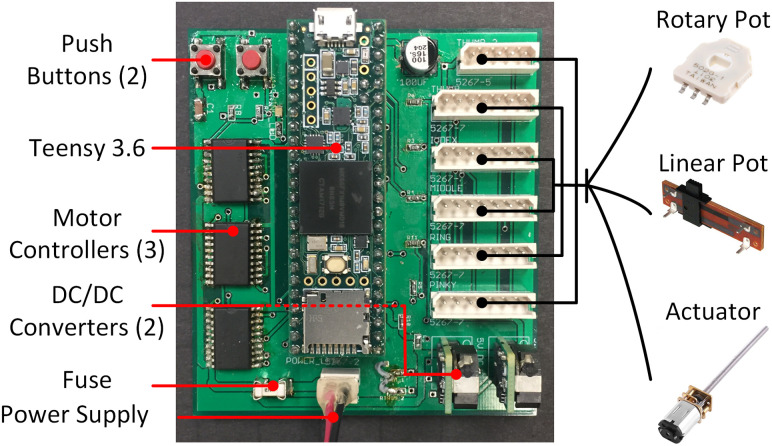
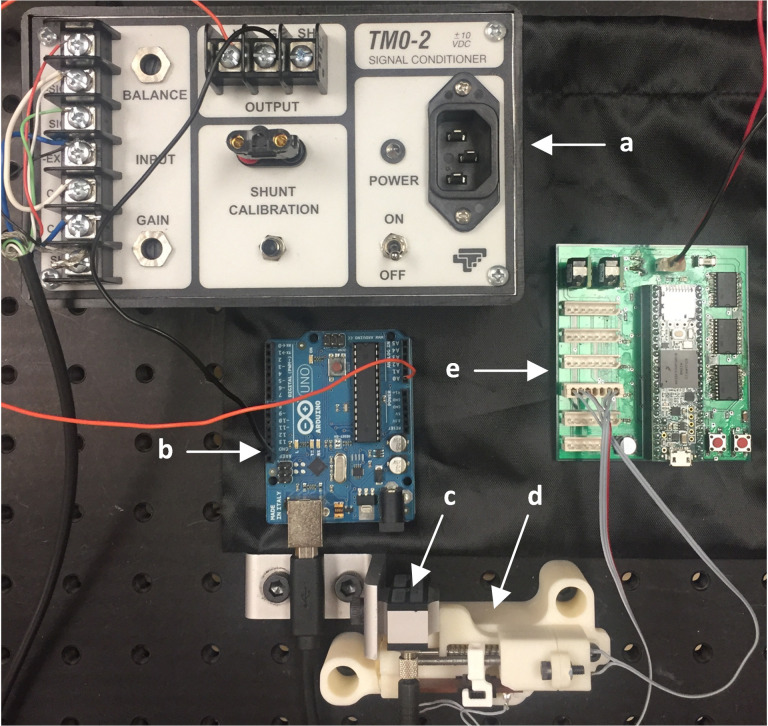
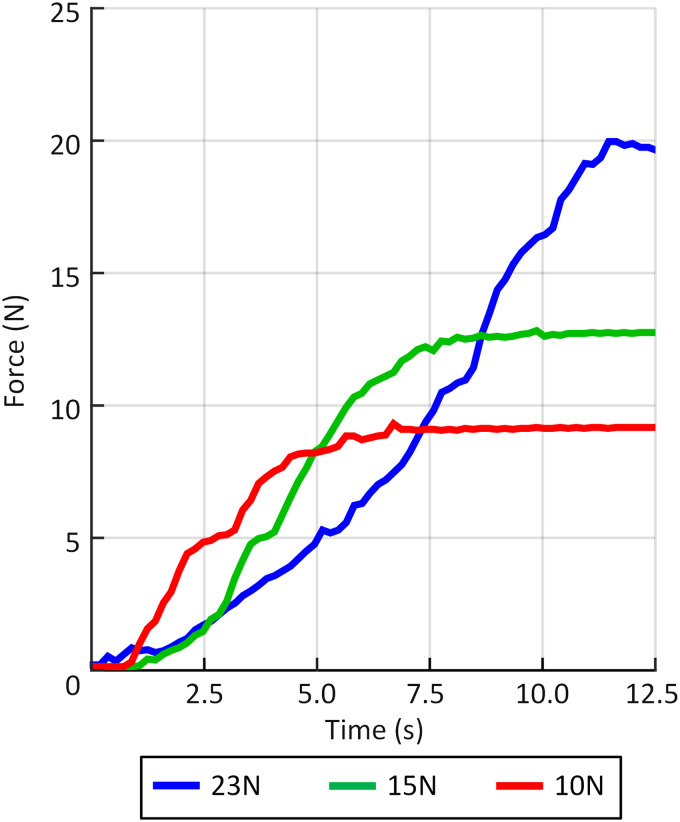
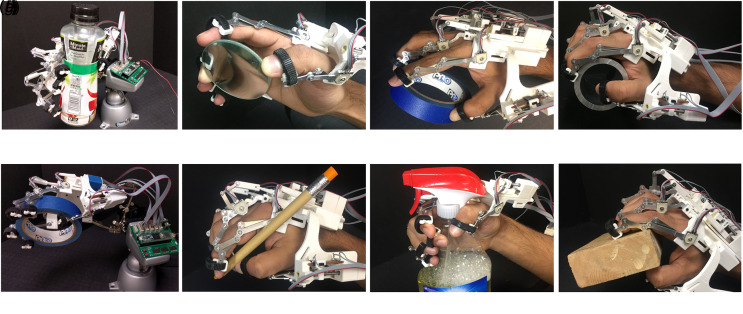
This paper describes the design and control of a novel hand exoskeleton. A subcategory of upper extremity exoskeletons, hand exoskeletons have promising applications in healthcare services, industrial workplaces, virtual reality, and military. Although much progress has been made in this field, most of the existing systems are position controlled and face several design challenges, including achieving minimal size and weight, difficulty enforcing natural grasping motions, exerting sufficient grip strength, ensuring the safety of the users hand, and maintaining overall user friendliness. To address these issues, this paper proposes a novel, slim, lightweight linkage mechanism design for a hand exoskeleton with a force control paradigm enabled via a compact series elastic actuator. A detailed design overview of the proposed mechanism is provided, along with kinematic and static analyses. To validate the overall proposed hand exoskeleton system, a fully integrated prototype is developed and tested in a series of experimental trials.
Keywords: actuators and transmissions; compliant mechanisms; grasping and fixturing; multi-body dynamics and exoskelotons; wearable robots.
Figures


References
-
- Bogue, R., 2009, “Exoskeletons and Robotic Prosthetics: A Review of Recent Developments,” Industrial Robot, 36(5), pp. 421–427. 10.1108/01439910910980141 - DOI
-
- Brault, M. W., 2010, Americans with Disabilities: 2010. U.S. Census 2010 Report. https://www2.census.gov/library/publications/2012/demo/p70-131.pdf
-
- Yap, H. K., Lim, J. H., Nasrallah, F., Goh, J. C., and Yeow, R. C., 2015, “A Soft Exoskeleton for Hand Assistive and Rehabilitation Application Using Pneumatic Actuators With Variable Stiffness,” Proceedings — IEEE International Conference on Robotics and Automation, Seattle, WA, May 26–30, pp. 4967–4972.
-
- Ho, N. S., Tong, K. Y., Hu, X. L., Fung, K. L., Wei, X. J., Rong, W., and Susanto, E. A., 2011, “An EMG-Driven Exoskeleton Hand Robotic Training Device on Chronic Stroke Subjects: Task Training System for Stroke Rehabilitation,” Proceedings of IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, June 29–July 1. DOI: 10.1109/ICORR.2011.5975340 - DOI - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials