

Real-Time Vehicle Positioning and Mapping Using Graph Optimization
- PMID: 33923735
- PMCID: PMC8072526
- DOI: 10.3390/s21082815
Real-Time Vehicle Positioning and Mapping Using Graph Optimization
Abstract
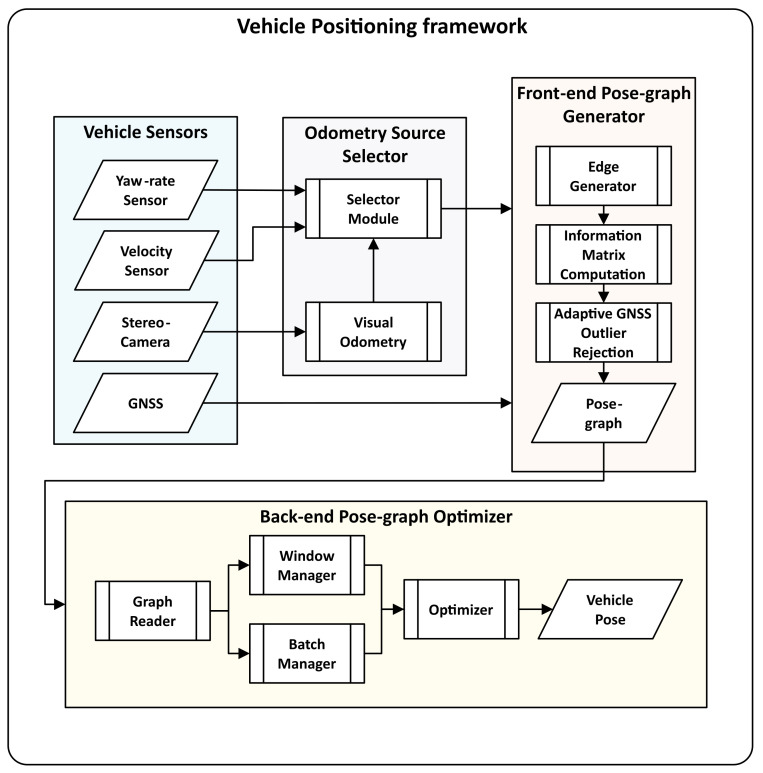
In this work, we propose and evaluate a pose-graph optimization-based real-time multi-sensor fusion framework for vehicle positioning using low-cost automotive-grade sensors. Pose-graphs can model multiple absolute and relative vehicle positioning sensor measurements and can be optimized using nonlinear techniques. We model pose-graphs using measurements from a precise stereo camera-based visual odometry system, a robust odometry system using the in-vehicle velocity and yaw-rate sensor, and an automotive-grade GNSS receiver. Our evaluation is based on a dataset with 180 km of vehicle trajectories recorded in highway, urban, and rural areas, accompanied by postprocessed Real-Time Kinematic GNSS as ground truth. We compare the architecture's performance with (i) vehicle odometry and GNSS fusion and (ii) stereo visual odometry, vehicle odometry, and GNSS fusion; for offline and real-time optimization strategies. The results exhibit a 20.86% reduction in the localization error's standard deviation and a significant reduction in outliers when compared with automotive-grade GNSS receivers.
Keywords: multi-sensor fusion; pose-graph optimization; vehicle localization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










References
-
- SAE, J3016 . Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE International; Warrendale, PA, USA: 2014. Technical Report.
-
- Cai C., He C., Santerre R., Pan L., Cui X., Zhu J. A comparative analysis of measurement noise and multipath for four constellations: GPS, BeiDou, GLONASS and Galileo. Surv. Rev. 2016;48:287–295. doi: 10.1179/1752270615Y.0000000032. - DOI
-
- Godha S., Cannon M.E. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007;11:193–203. doi: 10.1007/s10291-006-0050-8. - DOI
-
- Caron F., Duflos E., Pomorski D., Vanheeghe P. GPS/IMU data fusion using multisensor Kalman filtering: Introduction of contextual aspects. Inf. Fusion. 2006;7:221–230. doi: 10.1016/j.inffus.2004.07.002. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
