

Myoelectric prosthesis users and non-disabled individuals wearing a simulated prosthesis exhibit similar compensatory movement strategies
- PMID: 33933105
- PMCID: PMC8088043
- DOI: 10.1186/s12984-021-00855-x
Myoelectric prosthesis users and non-disabled individuals wearing a simulated prosthesis exhibit similar compensatory movement strategies
Abstract
Background: Research studies on upper limb prosthesis function often rely on the use of simulated myoelectric prostheses (attached to and operated by individuals with intact limbs), primarily to increase participant sample size. However, it is not known if these devices elicit the same movement strategies as myoelectric prostheses (operated by individuals with amputation). The objective of this study was to address the question of whether non-disabled individuals using simulated prostheses employ the same compensatory movements (measured by hand and upper body kinematics) as individuals who use actual myoelectric prostheses.
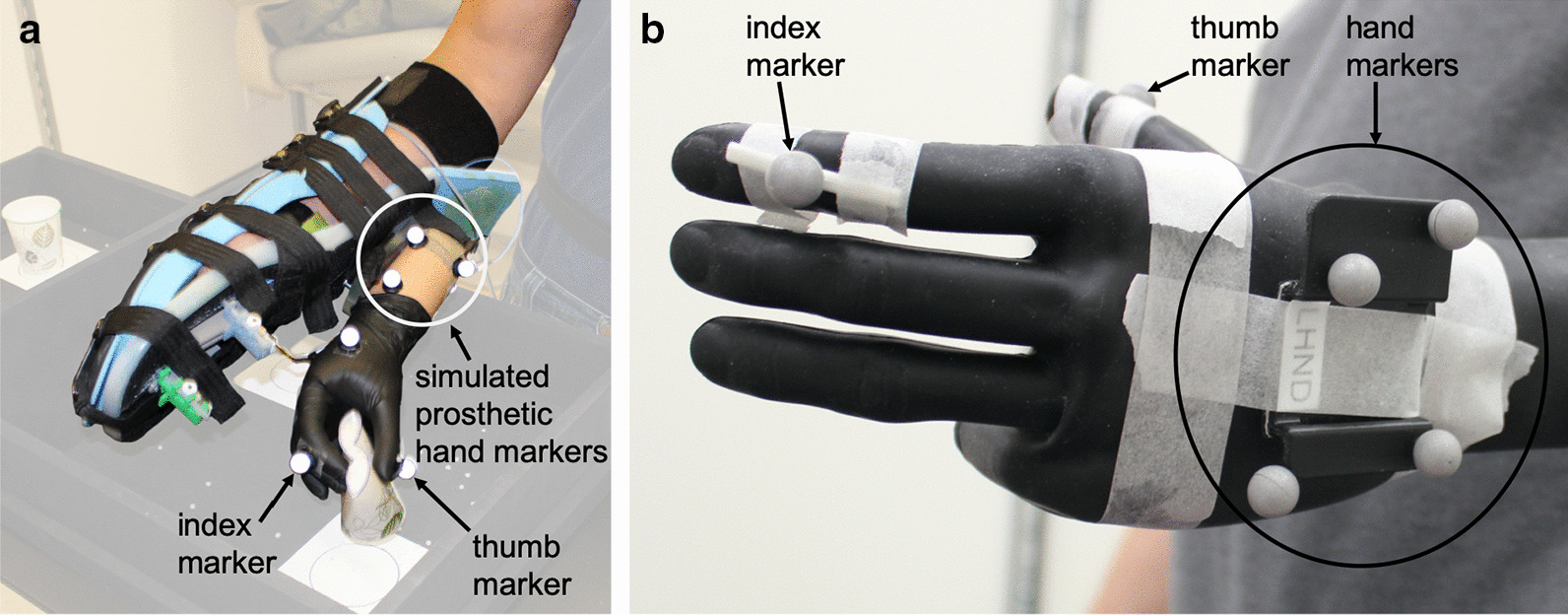
Methods: The upper limb movements of two participant groups were investigated: (1) twelve non-disabled individuals wearing a simulated prosthesis, and (2) three individuals with transradial amputation using their custom-fitted myoelectric devices. Motion capture was used for data collection while participants performed a standardized functional task. Performance metrics, hand movements, and upper body angular kinematics were calculated. For each participant group, these measures were compared to those from a normative baseline dataset. Each deviation from normative movement behaviour, by either participant group, indicated that compensatory movements were used during task performance.
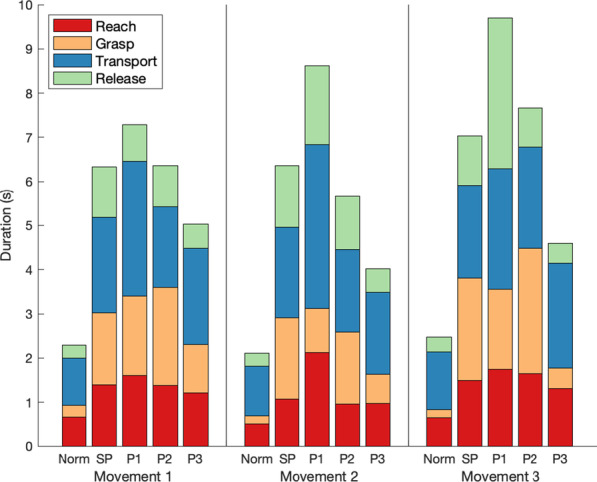
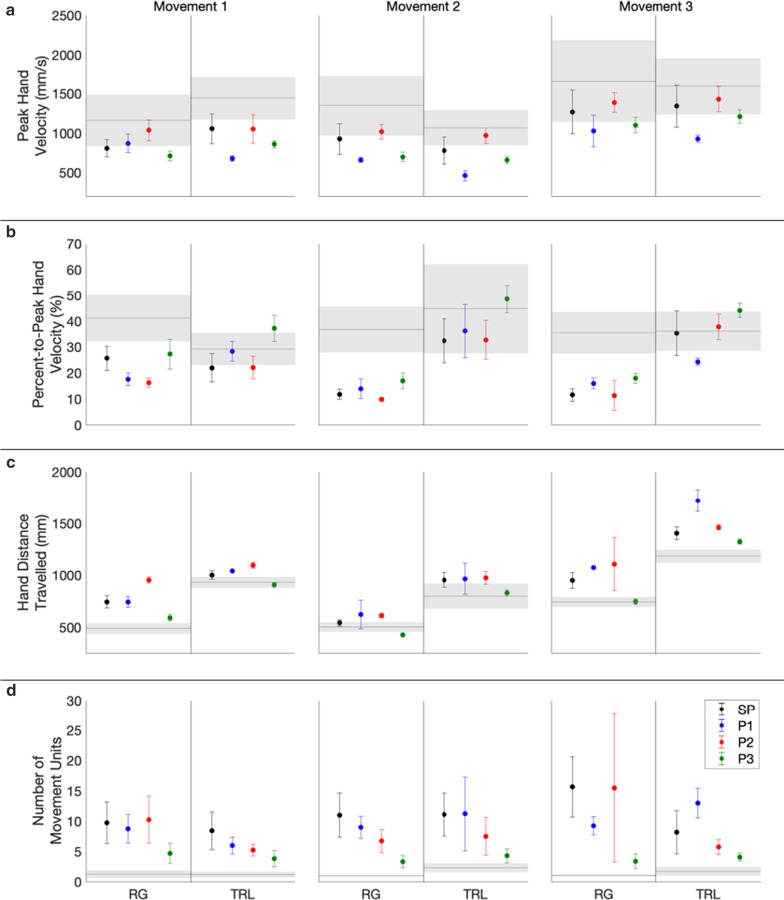
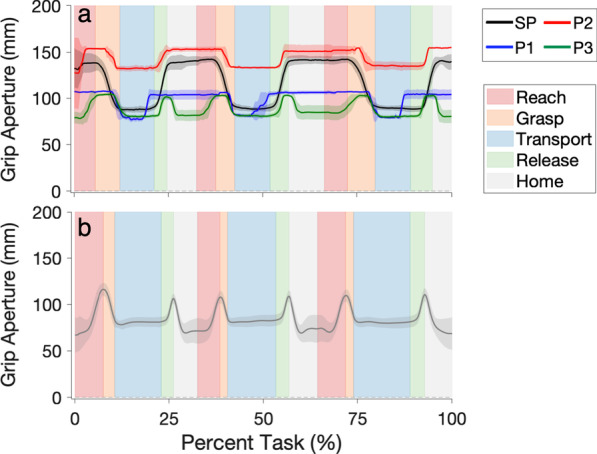
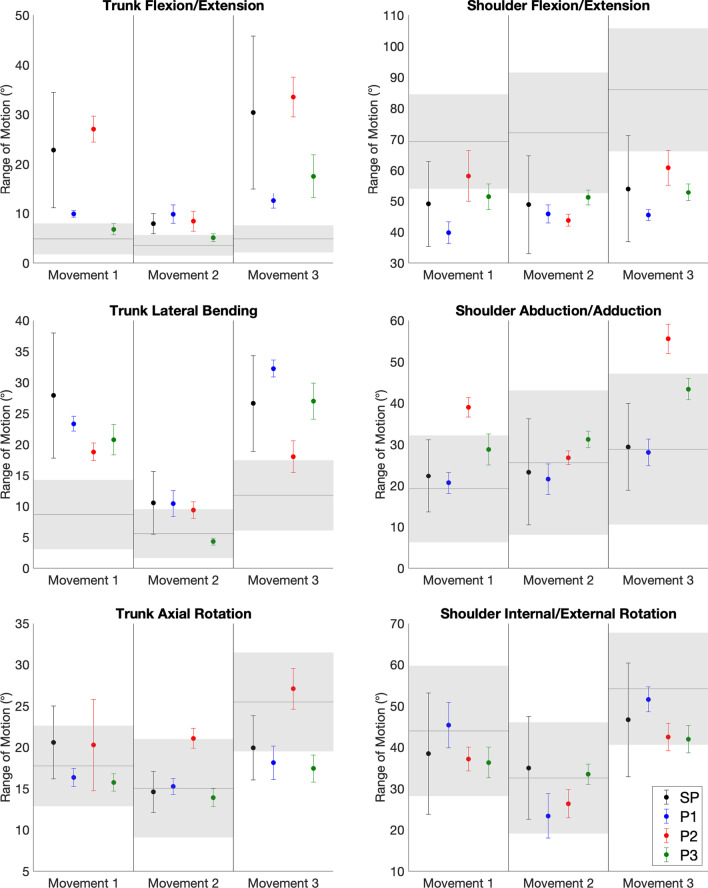
Results: Results show that participants using either a simulated or actual myoelectric prosthesis exhibited similar deviations from normative behaviour in phase durations, hand velocities, hand trajectories, number of movement units, grip aperture plateaus, and trunk and shoulder ranges of motion.
Conclusions: This study suggests that the use of a simulated prosthetic device in upper limb research offers a reasonable approximation of compensatory movements employed by a low- to moderately-skilled transradial myoelectric prosthesis user.
Keywords: Bypass prosthesis; Compensatory movements; Motion capture; Myoelectric prosthesis; Simulated prosthesis; Transradial amputation; Upper body kinematics.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures

References
-
- Metzger AJ, Dromerick AW, Holley RJ, Lum PS. Characterization of compensatory trunk movements during prosthetic upper limb reaching tasks. Arch Phys Med Rehabil. 2012;93(11):2029–2034. - PubMed
-
- Hussaini A, Zinck A, Kyberd P. Categorization of compensatory motions in transradial myoelectric prosthesis users. Prosthet Orthot Int. 2017;41(3):286–293. - PubMed
-
- Biddiss E, Chau T. Upper-limb prosthetics: critical factors in device abandonment. Am J Phys Med Rehabil. 2007;86(12):977–987. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
