

Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
- PMID: 33976216
- PMCID: PMC8113469
- DOI: 10.1038/s41467-021-23020-3
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
Abstract
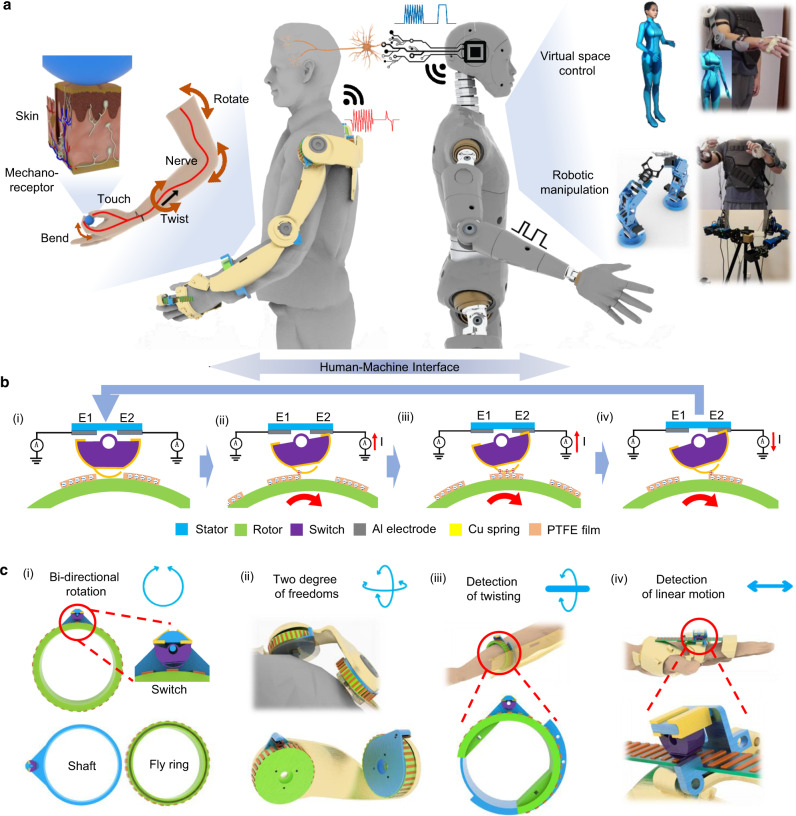
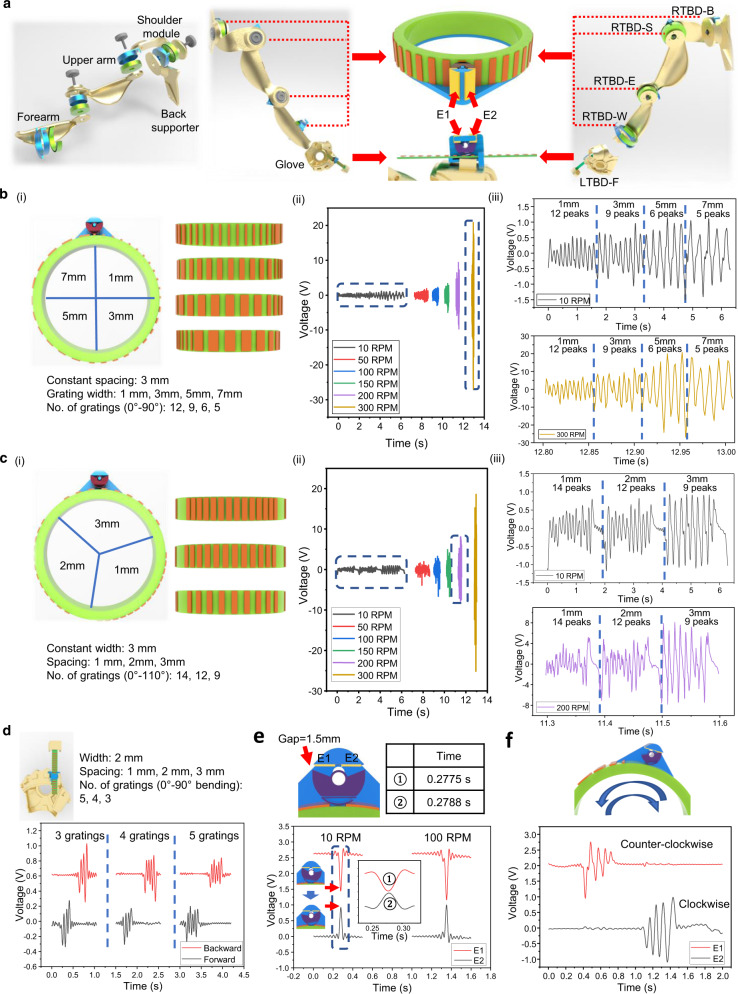
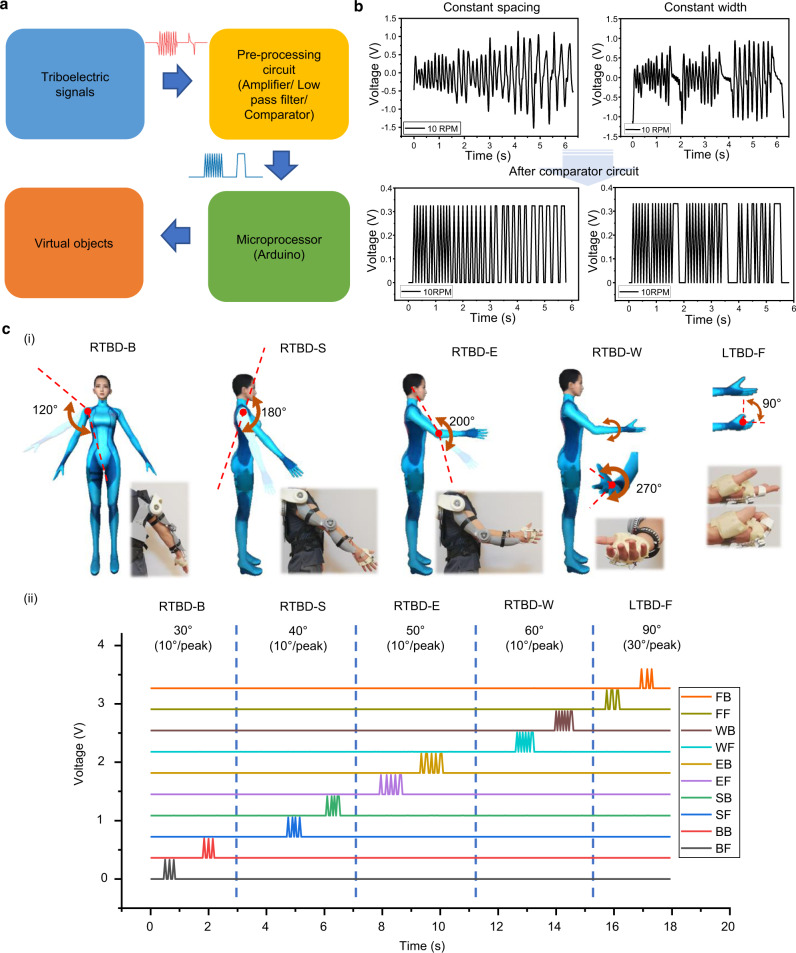
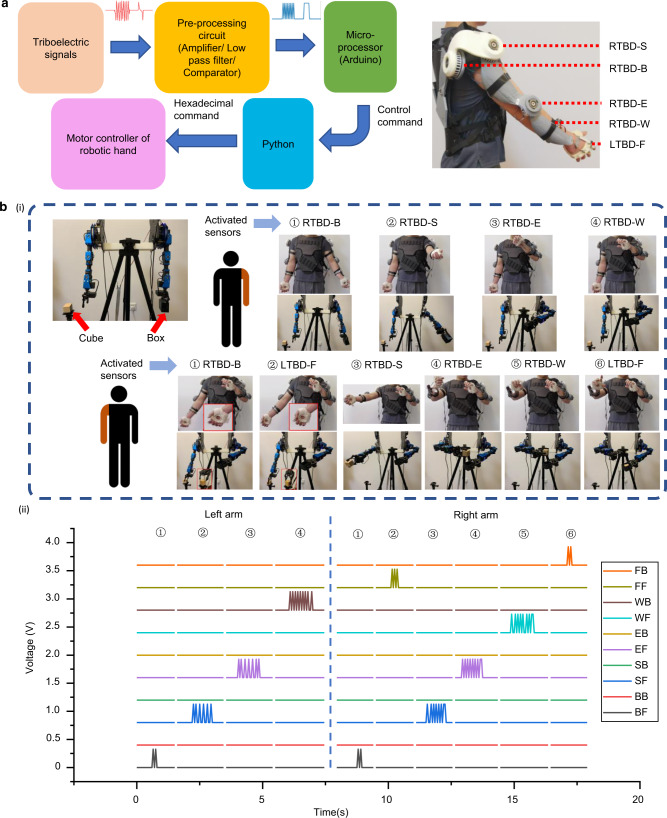
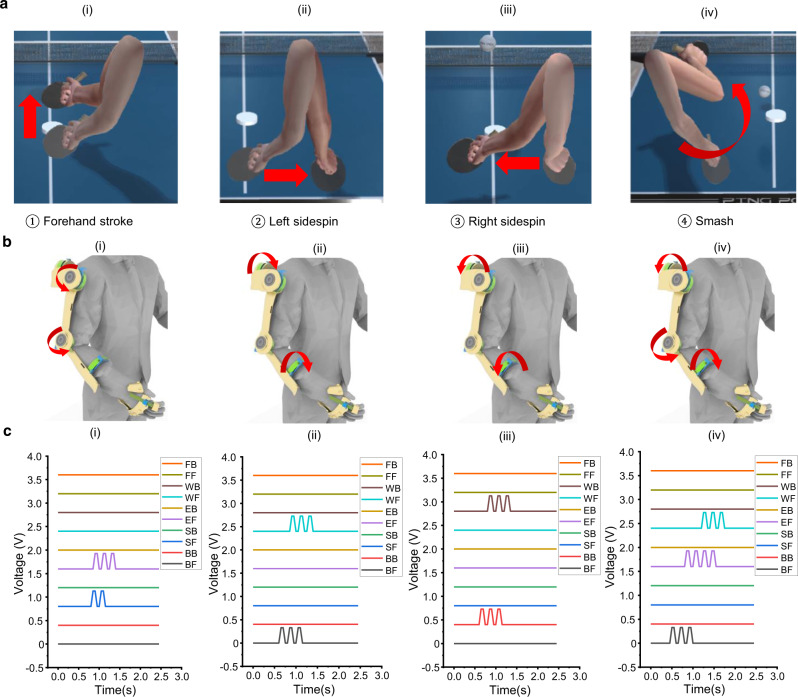
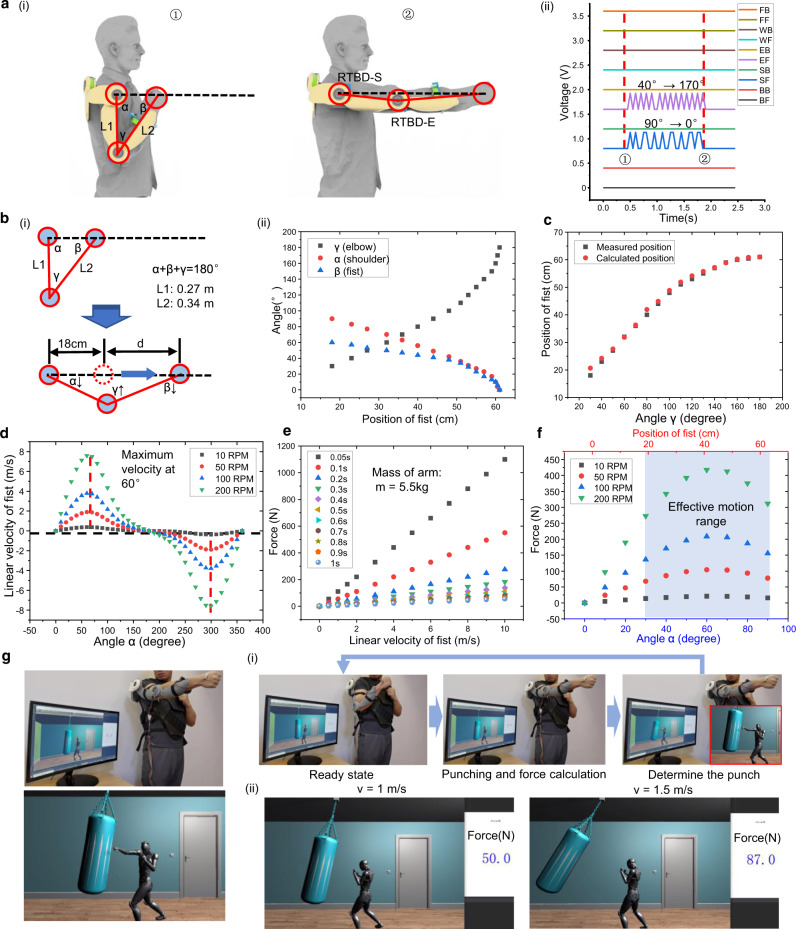
Rapid developments of robotics and virtual reality technology are raising the requirements of more advanced human-machine interfaces for achieving efficient parallel control. Exoskeleton as an assistive wearable device, usually requires a huge cost and complex data processing to track the multi-dimensional human motions. Alternatively, we propose a triboelectric bi-directional sensor as a universal and cost-effective solution to a customized exoskeleton for monitoring all of the movable joints of the human upper limbs with low power consumption. The corresponding movements, including two DOF rotations of the shoulder, twisting of the wrist, and the bending motions, are detected and utilized for controlling the virtual character and the robotic arm in real-time. Owing to the structural consistency between the exoskeleton and the human body, further kinetic analysis offers additional physical parameters without introducing other types of sensors. This exoskeleton sensory system shows a great potential of being an economic and advanced human-machine interface for supporting the manipulation in both real and virtual worlds, including robotic automation, healthcare, and training applications.
Conflict of interest statement
M.Z., Z.S., and C.L. are inventors on patent application (pending, Ref: 2021-019) submitted by National University of Singapore, that covers exoskeleton manipulator with the bidirectional triboelectric sensors enabled sensory system. The remaining author declares no competing interests.
Figures
References
-
- Niyetkaliyev AS, Hussain S, Ghayesh MH, Alici G. Review on design and control aspects of robotic shoulder rehabilitation orthoses. IEEE Trans. Hum.-Mach. Syst. 2017;47:1134–1145. doi: 10.1109/THMS.2017.2700634. - DOI
-
- Polygerinos P, et al. Soft robotics: review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv. Eng. Mater. 2017;19:1700016. doi: 10.1002/adem.201700016. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
