

Compacting oblivious agents on dynamic rings
- PMID: 33981837
- PMCID: PMC8080426
- DOI: 10.7717/peerj-cs.466
Compacting oblivious agents on dynamic rings
Abstract
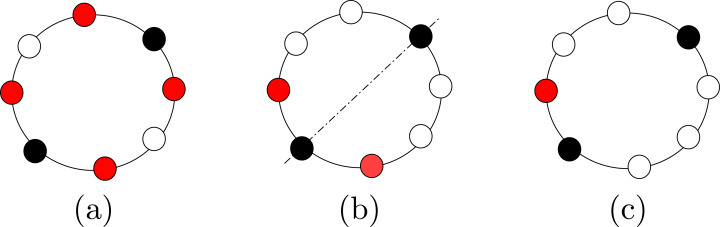
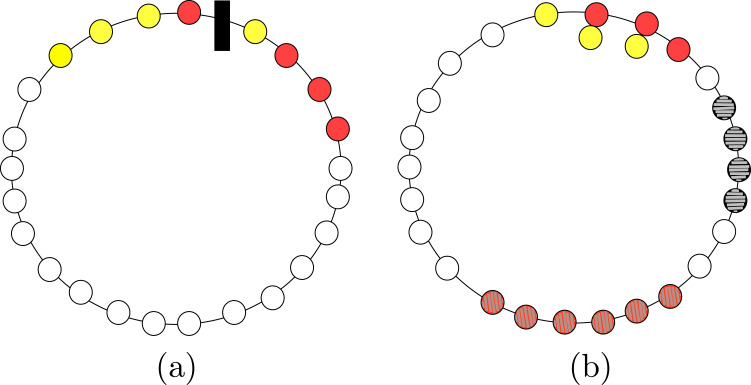
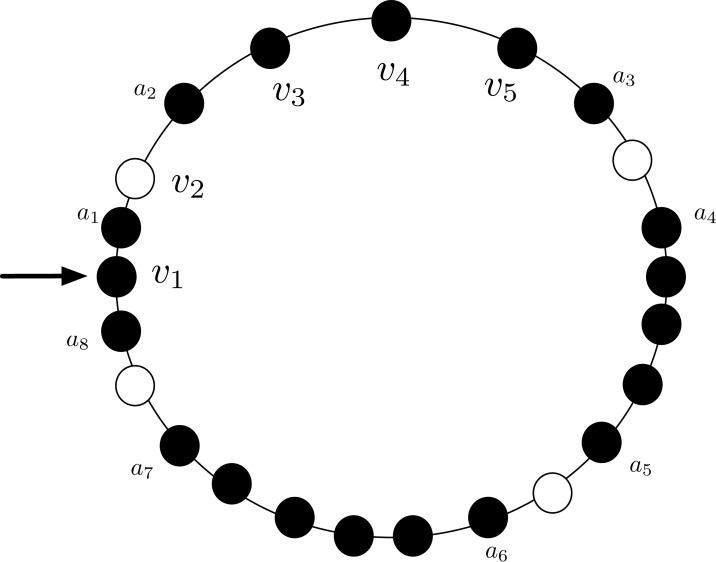
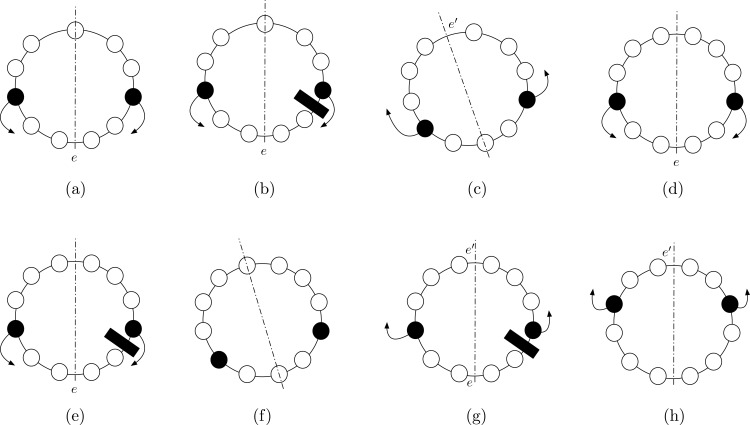
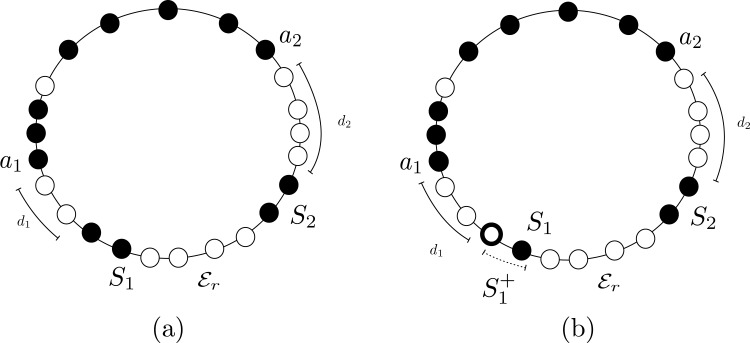
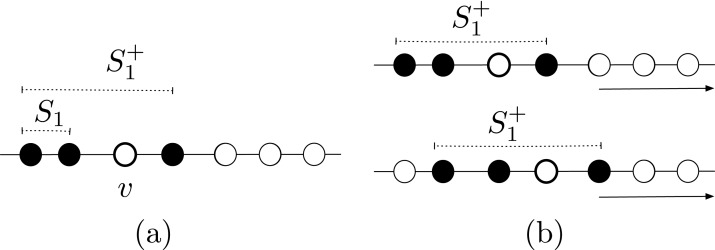
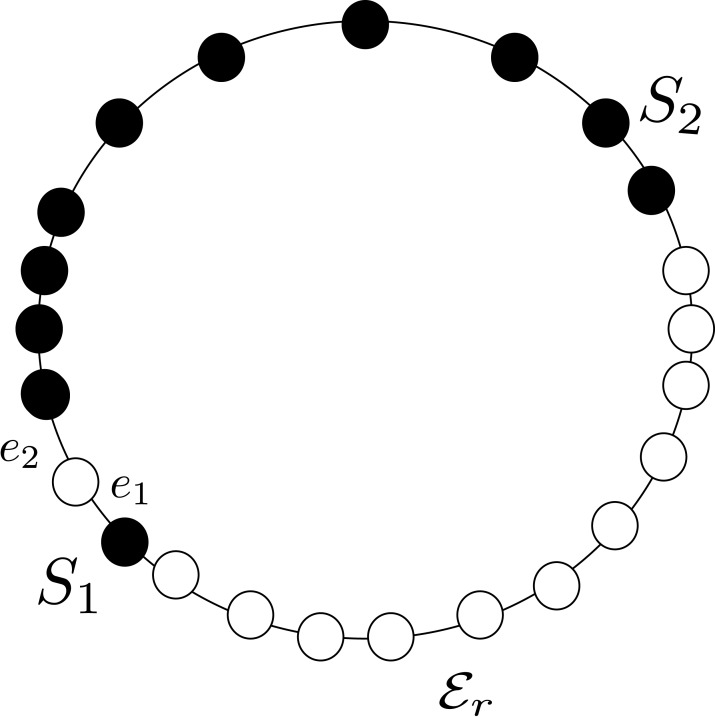
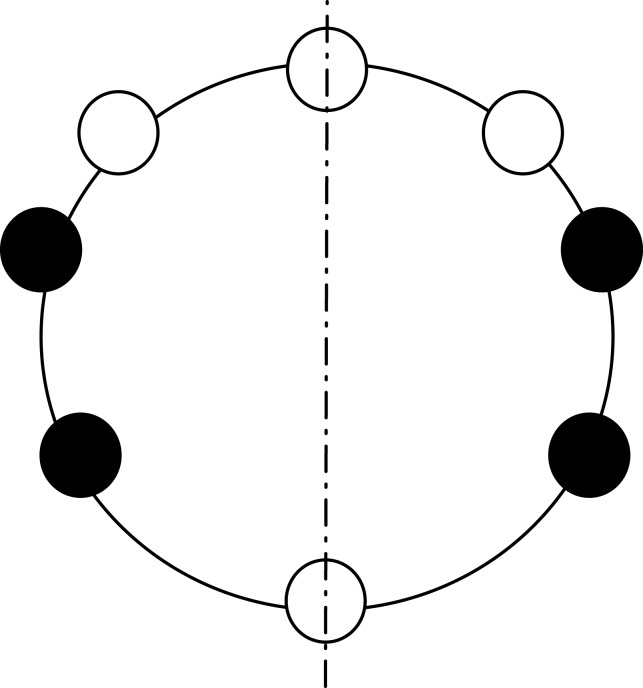
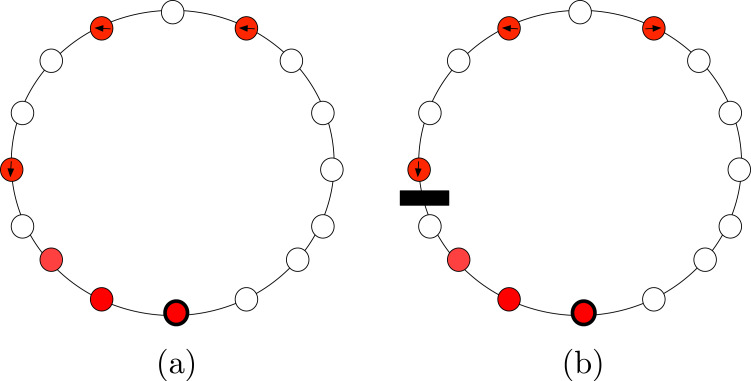
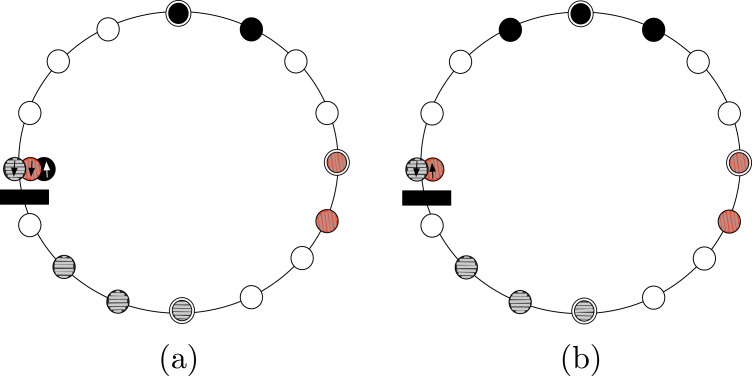
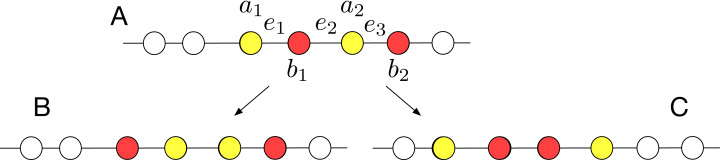
In this paper we investigate dynamic networks populated by autonomous mobile agents. Dynamic networks are networks whose topology can change continuously, at unpredictable locations and at unpredictable times. These changes are not considered to be faults, but rather an integral part of the nature of the system. The agents can autonomously move on the network, with the goal of solving cooperatively an assigned common task. Here, we focus on a specific network: the unoriented ring. More specifically, we study 1-interval connected dynamic rings (i.e., at any time, at most one of the edges might be missing). The agents move according to the widely used Look-Compute-Move life cycle, and can be homogenous (thus identical) or heterogenous (agents are assigned colors from a set of c > 1 colors). For identical agents, their goal is to form a compact segment, where agents occupy a continuous part of the ring and no two agents occupy the same node: we call this the Compact Configuration Problem. In the case of agents with colors, called the Colored Compact Configuration Problem, the goal is to group agents such that each group is formed by all agents having the same color, it occupies a continuous segment of the network, and groups of agents having different colors occupy distinct areas of the network. In this paper we determine the necessary conditions to solve both proposed problems. For all solvable cases, we provide algorithms for both the monochromatic and the colored version of the compact configuration problem. All our algorithms work even for the simplest model where agents have no persistent memory, no communication capabilities and do not agree on a common orientation within the network. To the best of our knowledge this is the first work on the compaction problem in a dynamic network.
Keywords: Compacting problem; Distributed computing; Dynamic networks; Mobile agents; Ring network.
© 2021 Das et al.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures
References
-
- Augustine J, Pandurangan G, Robinson P. Distributed algorithmic foundations of dynamic networks. SIGACT News. 2016;47(1):69–98. doi: 10.1145/2902945.2902959. - DOI
-
- Bérard B, Lafourcade P, Millet L, Potop-Butucaru MG, Thierry-Mieg Y, Tixeuil S. Formal verification of mobile robot protocols. Distributed Computing. 2016;6(29):459–487.
-
- Bhagat S, Flocchini P, Mukhopadhyaya K, Santoro N. Weak robots performing conflicting tasks without knowing who is in their team. Proc. of the 21st International Conference on Distributed Computing and Networking (ICDCN).2020.
-
- Biely M, Robinson P, Schmid U, Schwarz M, Winkler K. Gracefully degrading consensus and k-set agreement in directed dynamic networks. 2nd International Conference on Networked Systems (NETSYS); 2015. pp. 109–124.
-
- Bournat M, Dubois S, Petit F. Gracefully degrading gathering in dynamic rings. Proc. 20th Int. Symp. on Stabilization, Safety, and Security of Distributed Systems (SSS) 2018; 2018. pp. 349–364.
LinkOut - more resources
Full Text Sources
Miscellaneous