

Two scene navigation systems dissociated by deliberate versus automatic processing
- PMID: 33992908
- PMCID: PMC8608425
- DOI: 10.1016/j.cortex.2021.03.027
Two scene navigation systems dissociated by deliberate versus automatic processing
Abstract
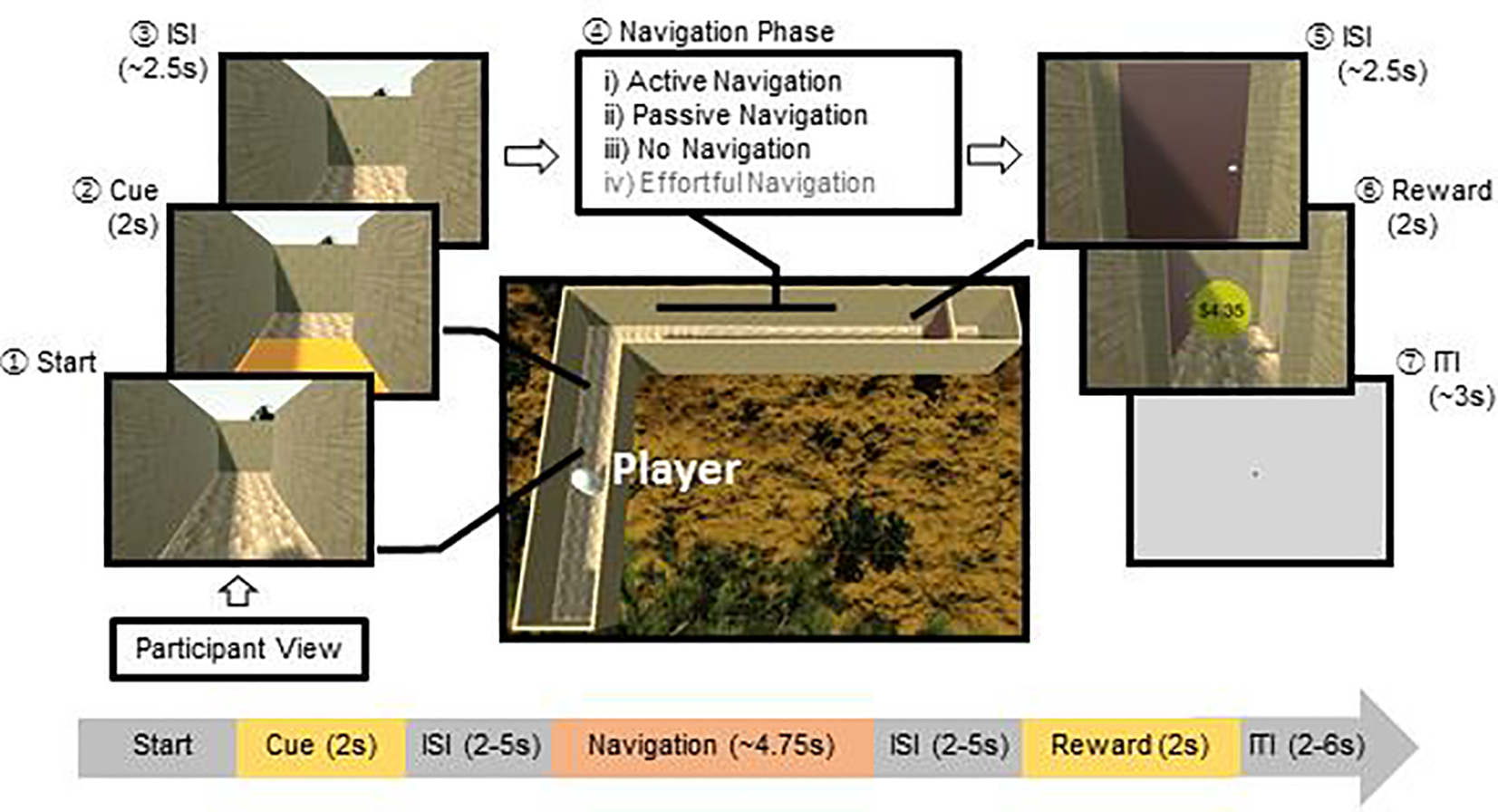
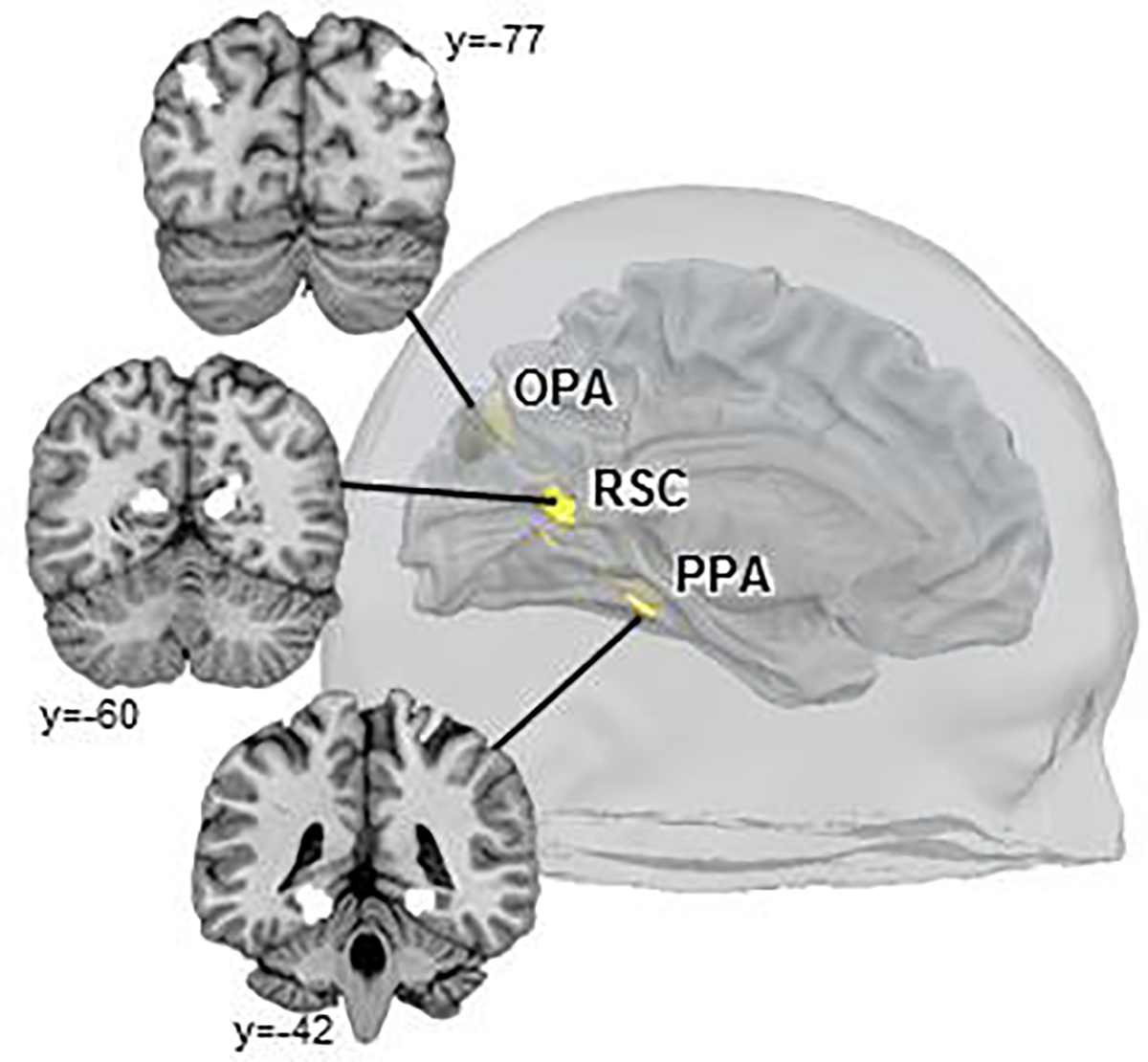
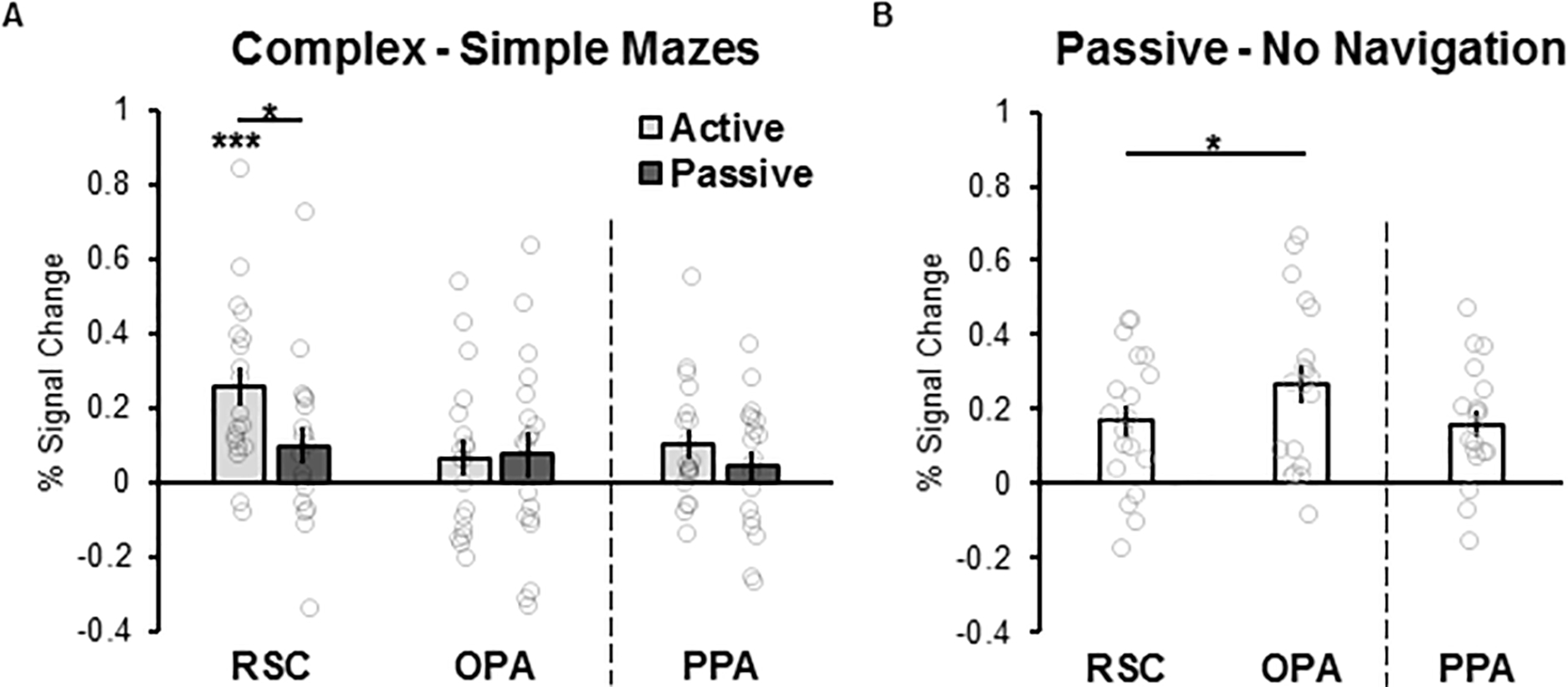
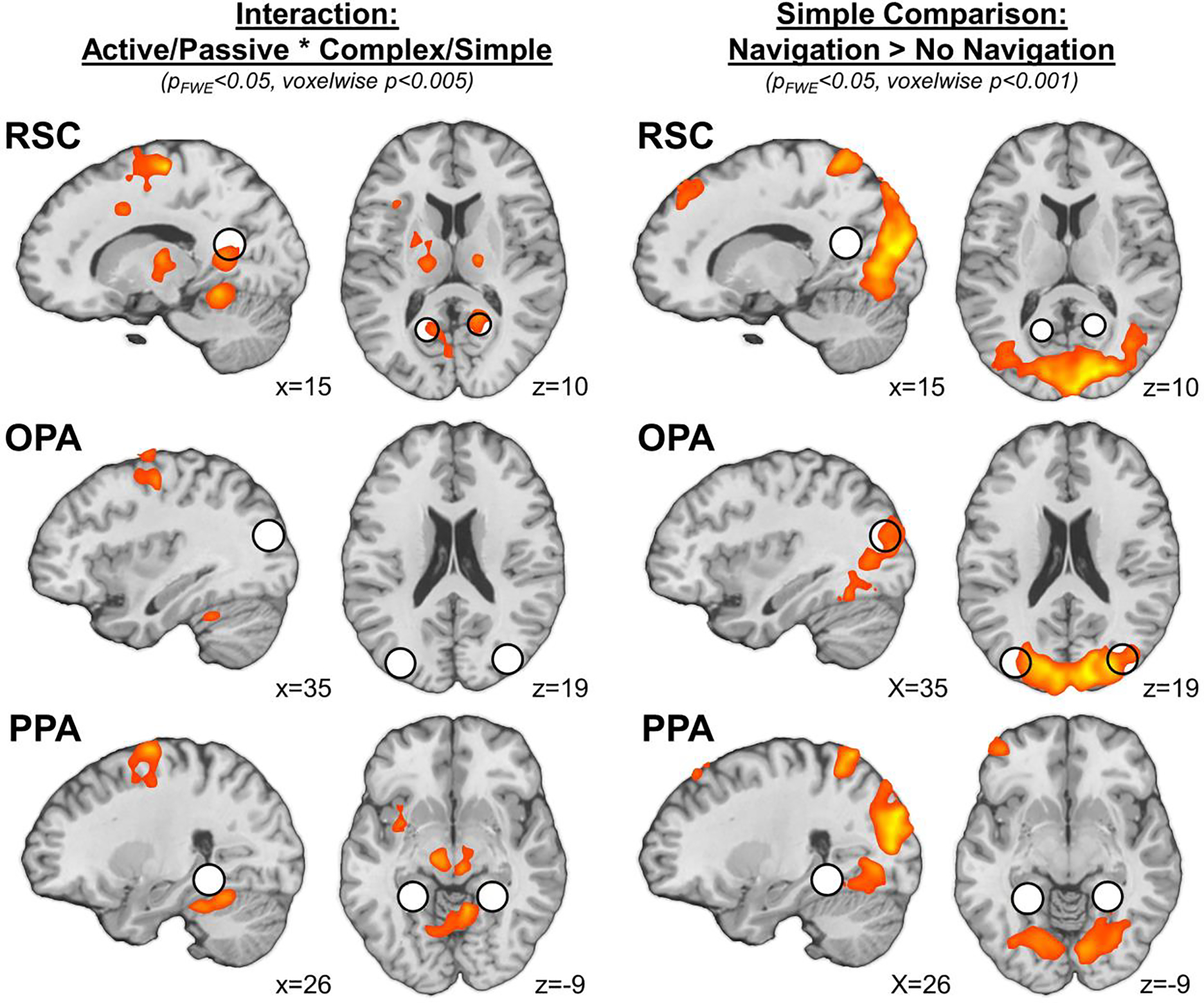
Successfully navigating the world requires avoiding boundaries and obstacles in one's immediately-visible environment, as well as finding one's way to distant places in the broader environment. Recent neuroimaging studies suggest that these two navigational processes involve distinct cortical scene processing systems, with the occipital place area (OPA) supporting navigation through the local visual environment, and the retrosplenial complex (RSC) supporting navigation through the broader spatial environment. Here we hypothesized that these systems are distinguished not only by the scene information they represent (i.e., the local visual versus broader spatial environment), but also based on the automaticity of the process they involve, with navigation through the broader environment (including RSC) operating deliberately, and navigation through the local visual environment (including OPA) operating automatically. We tested this hypothesis using fMRI and a maze-navigation paradigm, where participants navigated two maze structures (complex or simple, testing representation of the broader spatial environment) under two conditions (active or passive, testing deliberate versus automatic processing). Consistent with the hypothesis that RSC supports deliberate navigation through the broader environment, RSC responded significantly more to complex than simple mazes during active, but not passive navigation. By contrast, consistent with the hypothesis that OPA supports automatic navigation through the local visual environment, OPA responded strongly even during passive navigation, and did not differentiate between active versus passive conditions. Taken together, these findings suggest the novel hypothesis that navigation through the broader spatial environment is deliberate, whereas navigation through the local visual environment is automatic, shedding new light on the dissociable functions of these systems.
Keywords: Navigation; Occipital place area; Retrosplenial complex; Scene perception; fMRI.
Copyright © 2021 Elsevier Ltd. All rights reserved.
Conflict of interest statement
Declaration of competing interest The authors report no conflicts of interest, financial or otherwise. In the past three years MTT has served as a paid consultant to Blackthorn Therapeutics and Avanir Pharmaceuticals. None of these entities supported the current work, and all views expressed herein are solely those of the authors.
Figures
Similar articles
-
Three cortical scene systems and their development.Trends Cogn Sci. 2022 Feb;26(2):117-127. doi: 10.1016/j.tics.2021.11.002. Epub 2021 Nov 29. Trends Cogn Sci. 2022. PMID: 34857468 Free PMC article. Review.
-
The occipital place area represents first-person perspective motion information through scenes.Cortex. 2016 Oct;83:17-26. doi: 10.1016/j.cortex.2016.06.022. Epub 2016 Jul 15. Cortex. 2016. PMID: 27474914 Free PMC article.
-
Dissociable Neural Systems for Recognizing Places and Navigating through Them.J Neurosci. 2018 Nov 28;38(48):10295-10304. doi: 10.1523/JNEUROSCI.1200-18.2018. Epub 2018 Oct 22. J Neurosci. 2018. PMID: 30348675 Free PMC article.
-
The occipital place area represents the local elements of scenes.Neuroimage. 2016 May 15;132:417-424. doi: 10.1016/j.neuroimage.2016.02.062. Epub 2016 Feb 27. Neuroimage. 2016. PMID: 26931815 Free PMC article.
-
Parahippocampal and retrosplenial contributions to human spatial navigation.Trends Cogn Sci. 2008 Oct;12(10):388-96. doi: 10.1016/j.tics.2008.07.004. Epub 2008 Aug 28. Trends Cogn Sci. 2008. PMID: 18760955 Free PMC article. Review.
Cited by
-
Cortical Encoding of Spatial Structure and Semantic Content in 3D Natural Scenes.J Neurosci. 2025 Feb 26;45(9):e2157232024. doi: 10.1523/JNEUROSCI.2157-23.2024. J Neurosci. 2025. PMID: 39788741 Free PMC article.
-
A scene-selective region in the superior parietal lobule for visually guided navigation.Cereb Cortex. 2025 Apr 1;35(4):bhaf082. doi: 10.1093/cercor/bhaf082. Cereb Cortex. 2025. PMID: 40264261
-
Representation of navigational affordances and ego-motion in the occipital place area.Imaging Neurosci (Camb). 2025 Jan 10;3:imag_a_00424. doi: 10.1162/imag_a_00424. eCollection 2025. Imaging Neurosci (Camb). 2025. PMID: 40800867 Free PMC article.
-
Combined representation of visual features in the scene-selective cortex.Behav Brain Res. 2024 Aug 5;471:115110. doi: 10.1016/j.bbr.2024.115110. Epub 2024 Jun 11. Behav Brain Res. 2024. PMID: 38871131 Free PMC article.
-
Three cortical scene systems and their development.Trends Cogn Sci. 2022 Feb;26(2):117-127. doi: 10.1016/j.tics.2021.11.002. Epub 2021 Nov 29. Trends Cogn Sci. 2022. PMID: 34857468 Free PMC article. Review.
References
-
- Arkin RC (1990) Integrating behavioral, perceptual, and world knowledge in reactive navigation. Robotics and autonomous systems 6:105–122.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
