

A Fully Actuated Robotic Assistant for MRI-Guided Precision Conformal Ablation of Brain Tumors
- PMID: 33994771
- PMCID: PMC8117662
- DOI: 10.1109/tmech.2020.3012903
A Fully Actuated Robotic Assistant for MRI-Guided Precision Conformal Ablation of Brain Tumors
Abstract
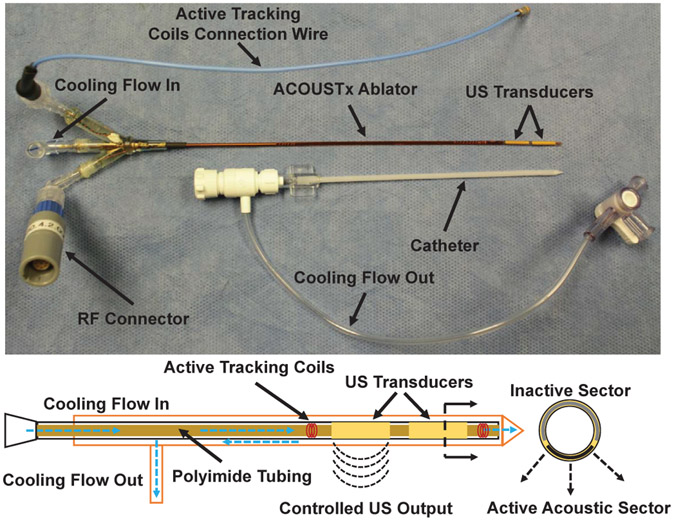
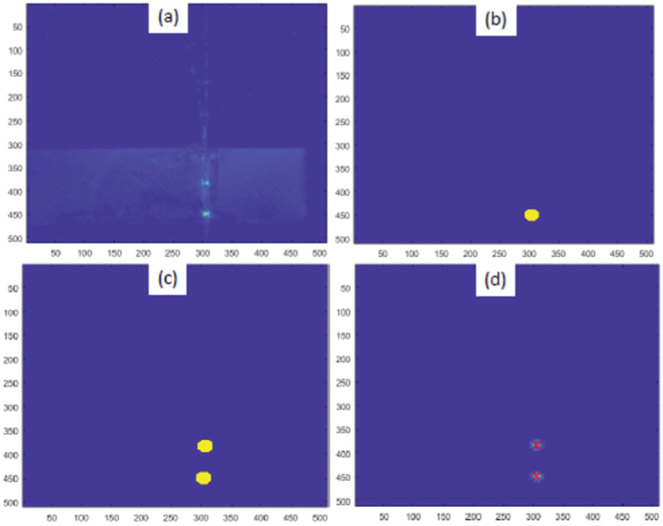
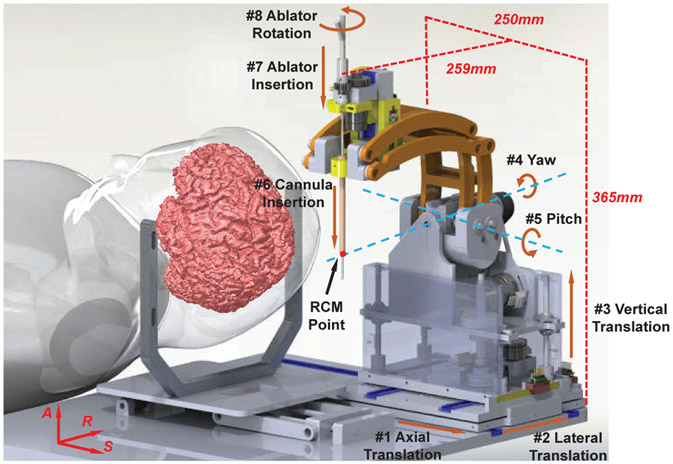
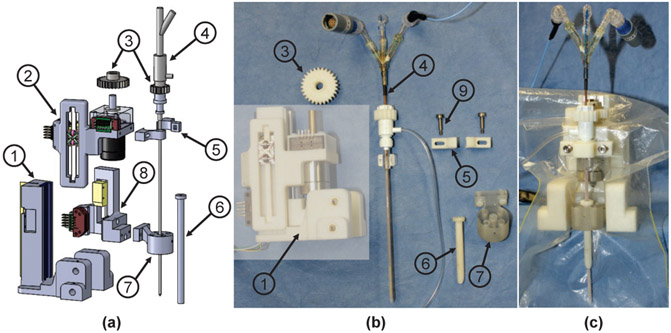
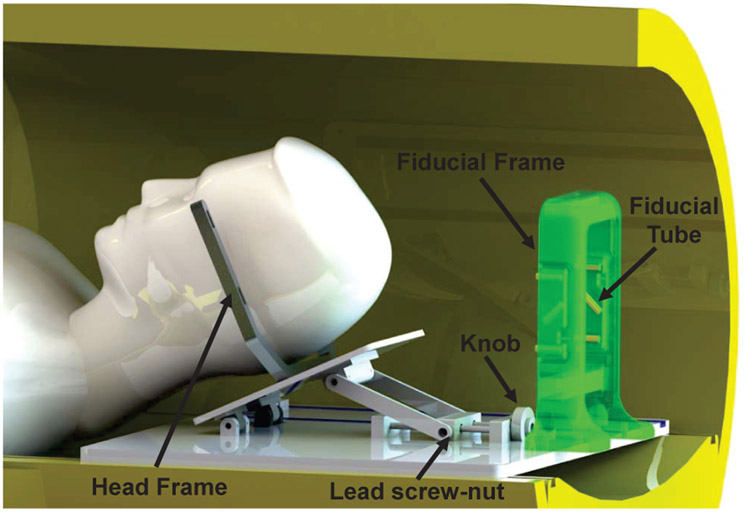
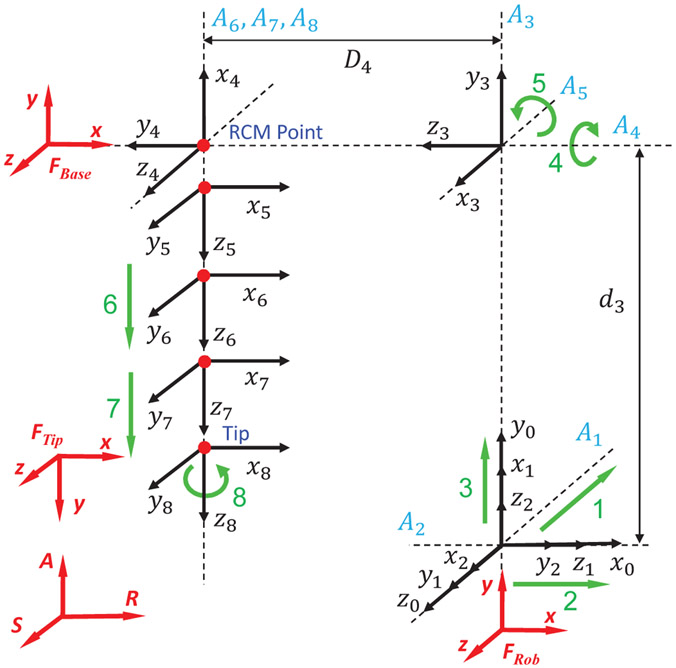
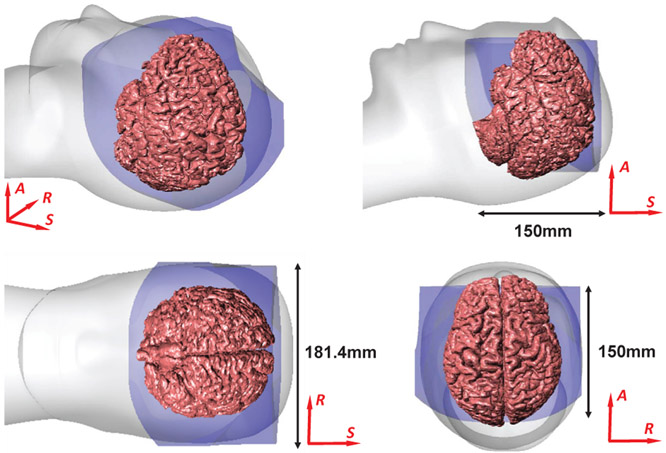
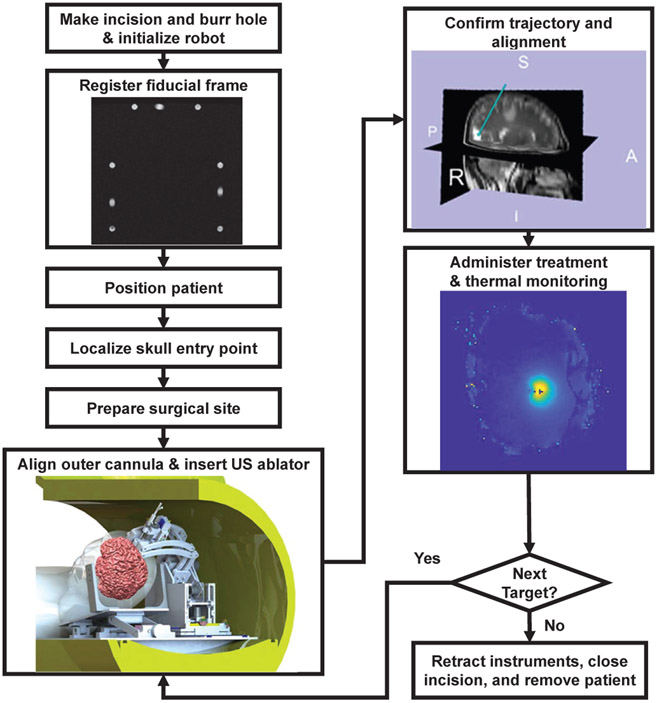
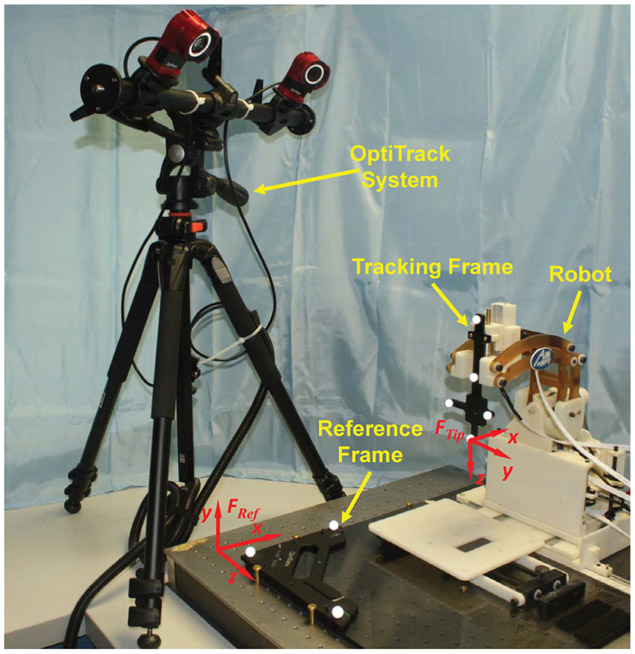
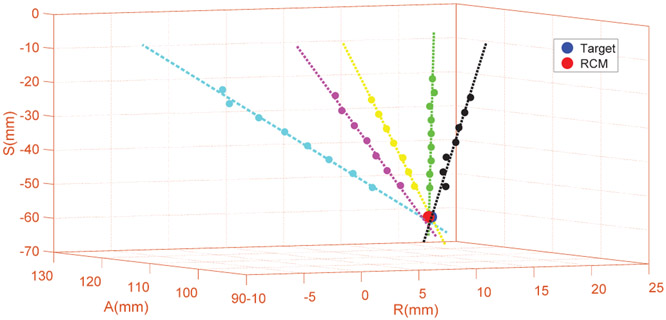
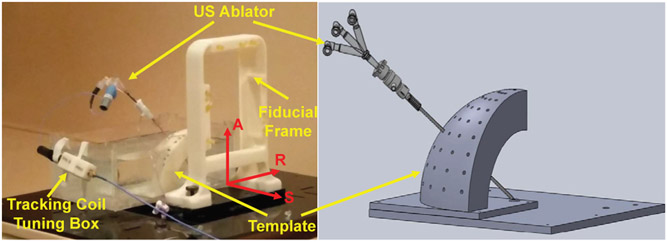
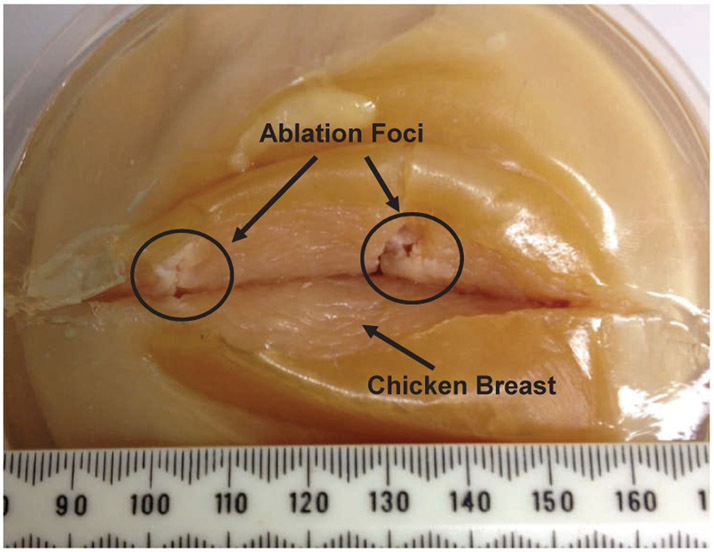
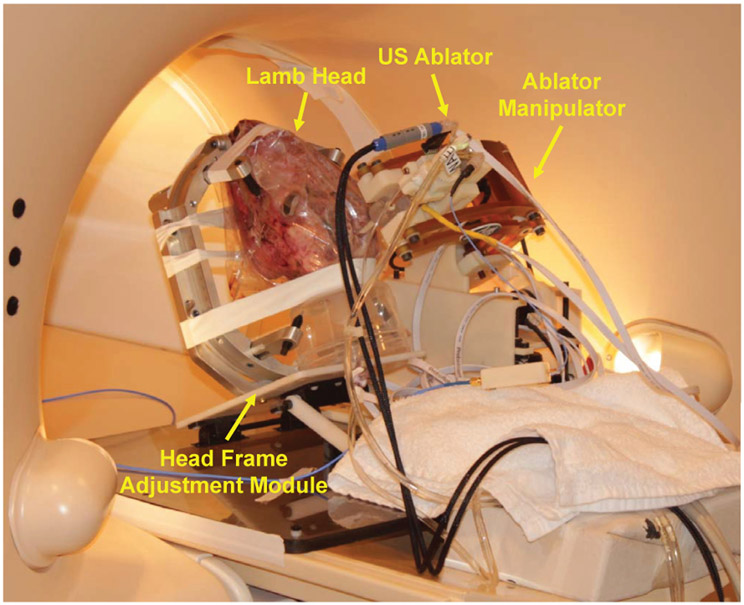
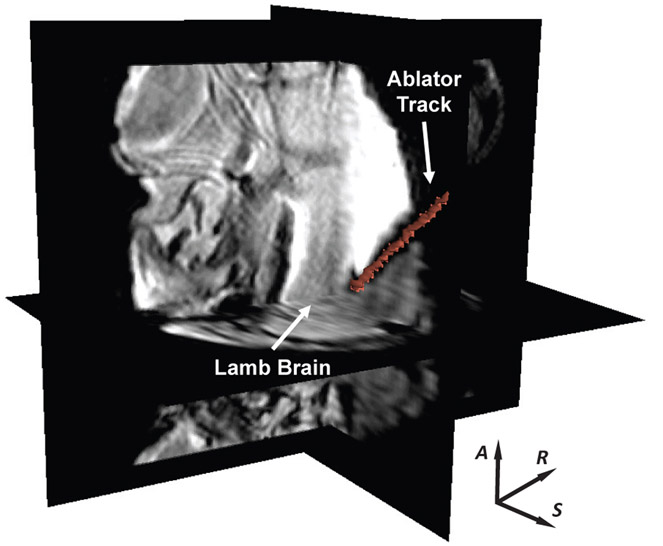
This paper reports the development of a fully actuated robotic assistant for magnetic resonance imaging (MRI)-guided precision conformal ablation of brain tumors using an interstitial high intensity needle-based therapeutic ultrasound (NBTU) ablator probe. The robot is designed with an eight degree-of-freedom (DOF) remote center of motion (RCM) manipulator driven by piezoelectric actuators, five for aligning the ultrasound thermal ablator to the target lesions and three for inserting and orienting the ablator and its cannula to generate a desired ablation profile. The 8-DOF fully actuated robot can be operated in the scanner bore during imaging; thus, alleviating the need of moving the patient in or out of the scanner during the procedure, and therefore potentially reducing the procedure time and streamlining the workflow. The free space positioning accuracy of the system is evaluated with the OptiTrack motion capture system, demonstrating the root mean square (RMS) error of the tip position to be 1.11±0.43mm. The system targeting accuracy in MRI is assessed with phantom studies, indicating the RMS errors of the tip position to be 1.45±0.66mm and orientation to be 1.53±0.69°. The feasibility of the system to perform thermal ablation is validated through a preliminary ex-vivo tissue study with position error less than 4.3mm and orientation error less than 4.3°.
Keywords: MRI-guided robot; image-guided therapy; robot-assisted neurosurgery; ultrasound thermal ablation.
Figures

Similar articles
-
A Fully Actuated Body-Mounted Robotic Assistant for MRI-Guided Low Back Pain Injection.IEEE Int Conf Robot Autom. 2020 May-Aug;2020:10.1109/icra40945.2020.9197534. doi: 10.1109/icra40945.2020.9197534. Epub 2020 Sep 15. IEEE Int Conf Robot Autom. 2020. PMID: 34422445 Free PMC article.
-
Body-mounted robotic assistant for MRI-guided low back pain injection.Int J Comput Assist Radiol Surg. 2020 Feb;15(2):321-331. doi: 10.1007/s11548-019-02080-3. Epub 2019 Oct 17. Int J Comput Assist Radiol Surg. 2020. PMID: 31625021 Free PMC article.
-
Fully Actuated Body-Mounted Robotic System for MRI-Guided Lower Back Pain Injections: Initial Phantom and Cadaver Studies.IEEE Robot Autom Lett. 2020 Oct;5(4):5245-5251. doi: 10.1109/lra.2020.3007459. Epub 2020 Jul 7. IEEE Robot Autom Lett. 2020. PMID: 33748414 Free PMC article.
-
Piezoelectrically Actuated Robotic System for MRI-Guided Prostate Percutaneous Therapy.IEEE ASME Trans Mechatron. 2015 Aug;20(4):1920-1932. doi: 10.1109/TMECH.2014.2359413. IEEE ASME Trans Mechatron. 2015. PMID: 26412962 Free PMC article.
-
Accuracy of robot-assisted stereotactic MRI-guided laser ablation in children with epilepsy.J Neurosurg Pediatr. 2023 May 19;32(2):214-222. doi: 10.3171/2023.4.PEDS2318. Print 2023 Aug 1. J Neurosurg Pediatr. 2023. PMID: 37209074 Review.
Cited by
-
An MR-Safe Pneumatic Stepper Motor: Design, Control, and Characterization.J Med Device. 2025 Mar 1;19(1):011007. doi: 10.1115/1.4067605. Epub 2025 Jan 28. J Med Device. 2025. PMID: 40206181
-
An MRI-guided stereotactic neurosurgical robotic system for semi-enclosed head coils.J Robot Surg. 2024 Dec 30;19(1):35. doi: 10.1007/s11701-024-02195-z. J Robot Surg. 2024. PMID: 39738740
-
Review of Robot-Assisted HIFU Therapy.Sensors (Basel). 2023 Apr 3;23(7):3707. doi: 10.3390/s23073707. Sensors (Basel). 2023. PMID: 37050766 Free PMC article. Review.
-
Biopiezoelectric-based nanomaterials; a promising strategy in cancer therapy.J Exp Clin Cancer Res. 2025 Jun 4;44(1):171. doi: 10.1186/s13046-025-03427-2. J Exp Clin Cancer Res. 2025. PMID: 40468341 Free PMC article. Review.
-
State of the Art and Future Opportunities in MRI-Guided Robot-Assisted Surgery and Interventions.Proc IEEE Inst Electr Electron Eng. 2022 Jul;110(7):968-992. doi: 10.1109/jproc.2022.3169146. Epub 2022 May 3. Proc IEEE Inst Electr Electron Eng. 2022. PMID: 35756185 Free PMC article.
References
-
- “American cancer society: Cancer facts and figures 2018.” https://www.cancer.org/research/cancer-facts-statistics/all-cancer-facts..., 2018.
-
- Gavrilovic IT and Posner JB, “Brain metastases: epidemiology and pathophysiology,” Journal of neuro-oncology, vol. 75, no. 1, pp. 5–14, 2005. - PubMed
-
- Li QH, Zamorano L, Pandya A, Perez R, Gong J, and Diaz F, “The application accuracy of the neuromate robota quantitative comparison with frameless and frame-based surgical localization systems,” Computer Aided Surgery, vol. 7, no. 2, pp. 90–98, 2002. - PubMed
-
- Eljamel M, “Validation of the pathfinder neurosurgical robot using a phantom,” The International Journal of Medical Robotics and Computer Assisted Surgery, vol. 3, no. 4, pp. 372–377, 2007. - PubMed
-
- Gonzalez-Martinez J, Vadera S, Mullin J, Enatsu R, Alexopoulos AV, Patwardhan R, Bingaman W, and Najm I, “Robot-assisted stereotactic laser ablation in medically intractable epilepsy: operative technique,” Neurosurgery, vol. 10, pp. 167–173, 2014. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources