

Nonlinear control of networked dynamical systems
- PMID: 33997094
- PMCID: PMC8117950
- DOI: 10.1109/tnse.2020.3032117
Nonlinear control of networked dynamical systems
Abstract
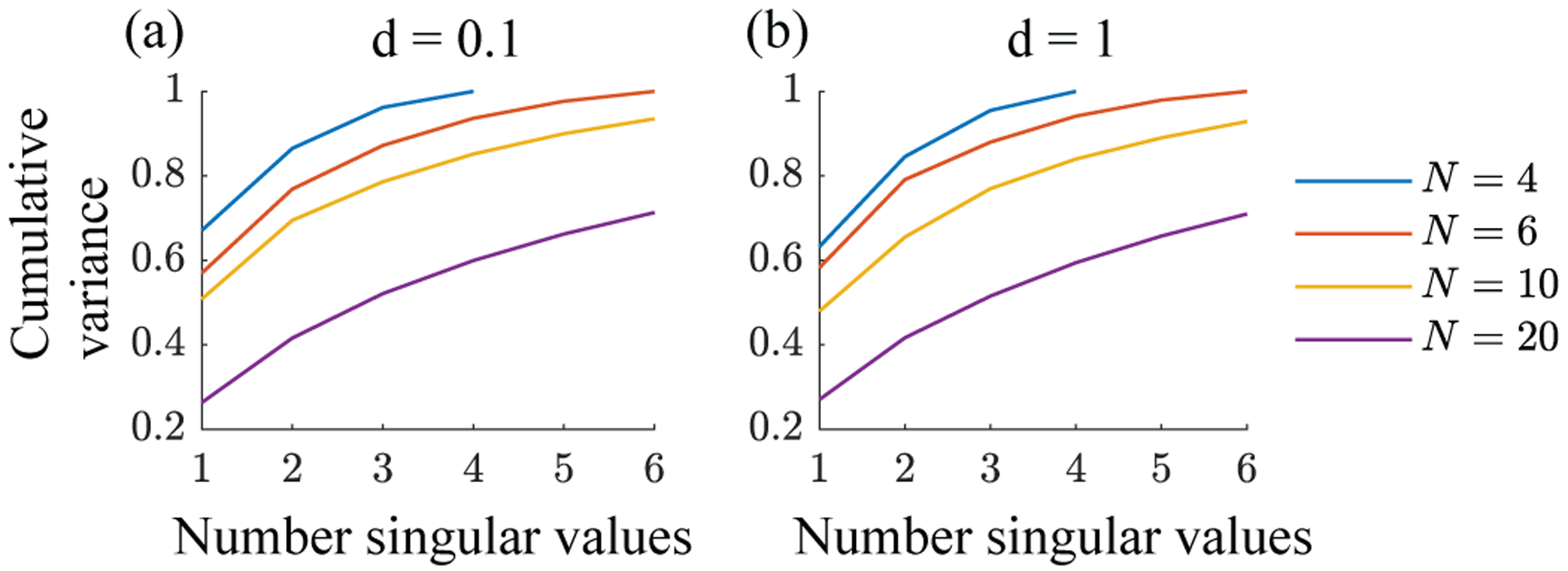
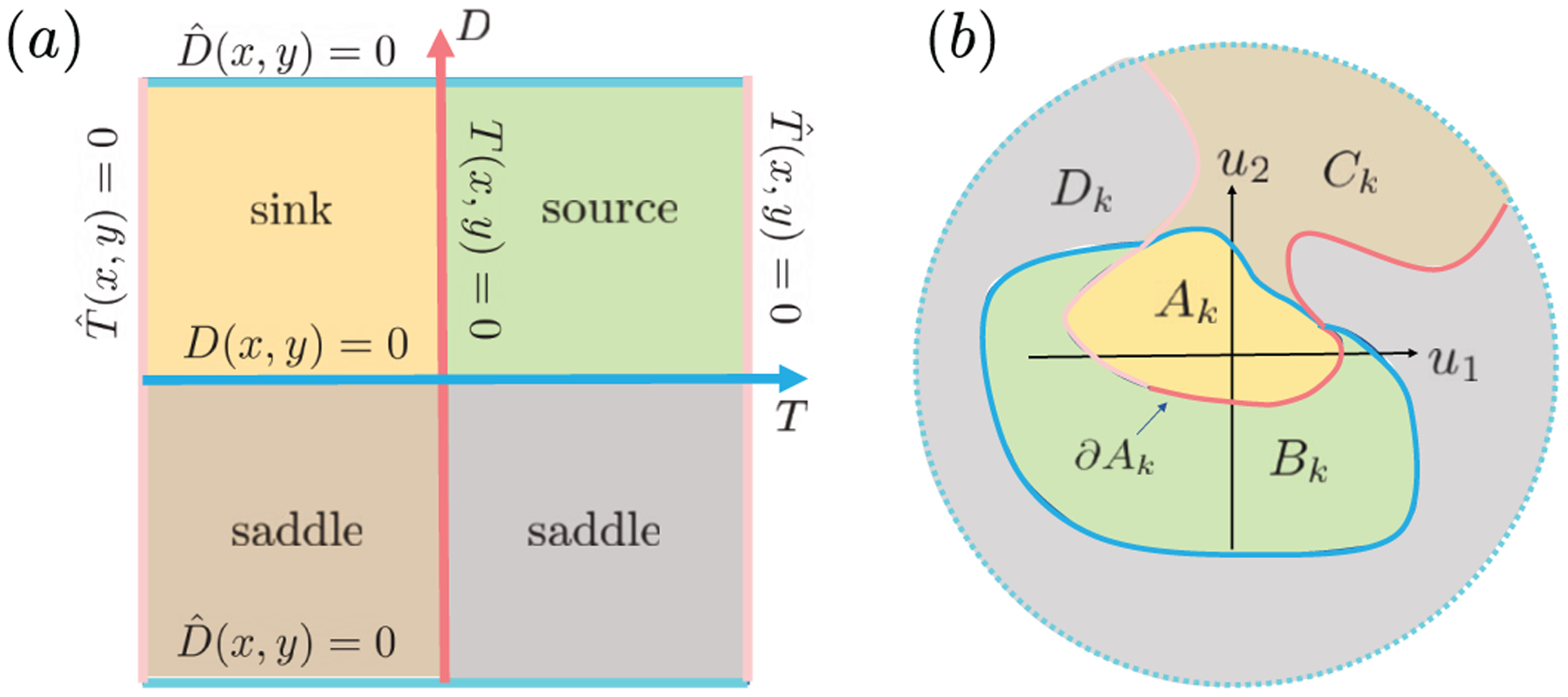
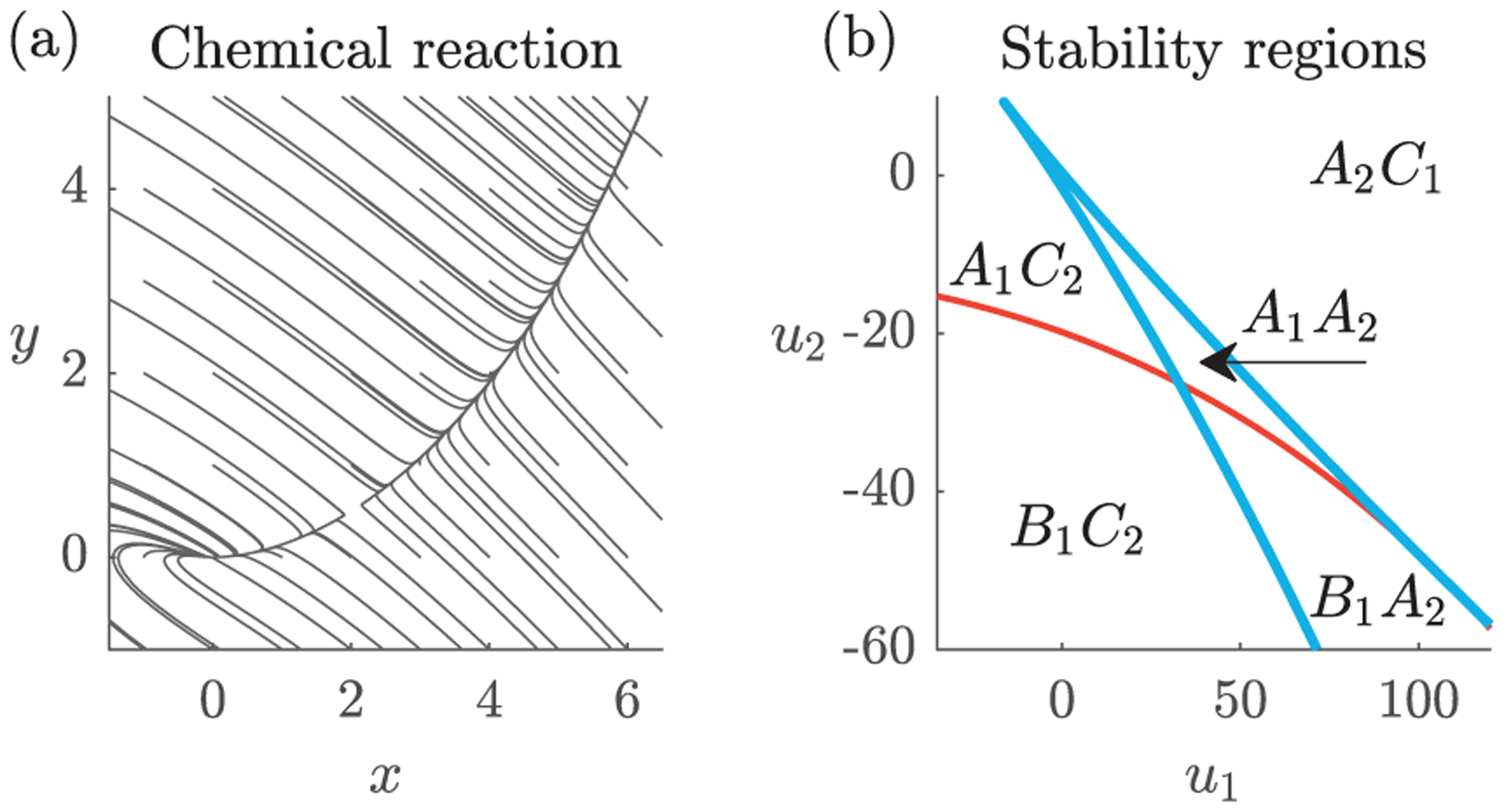
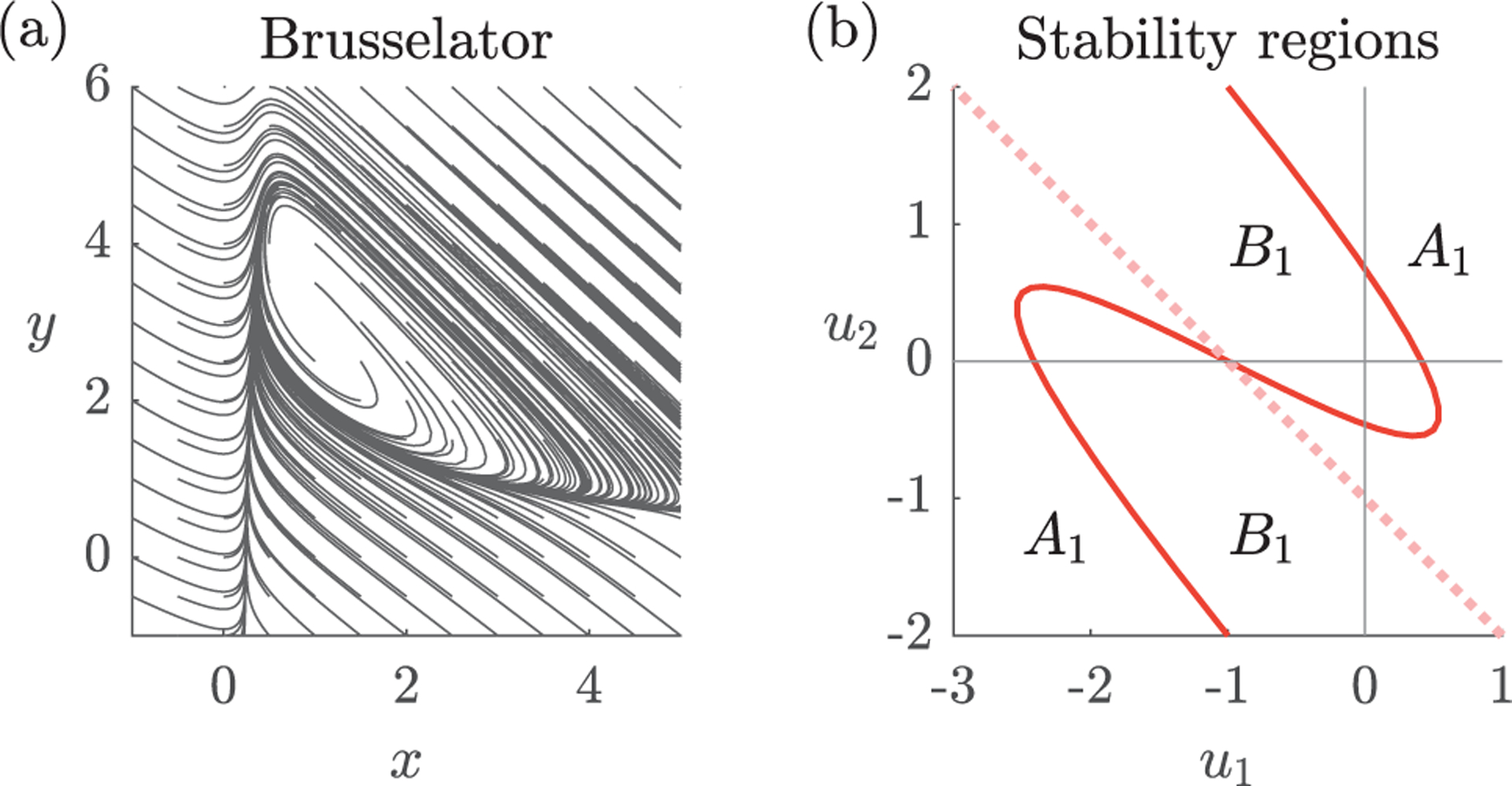
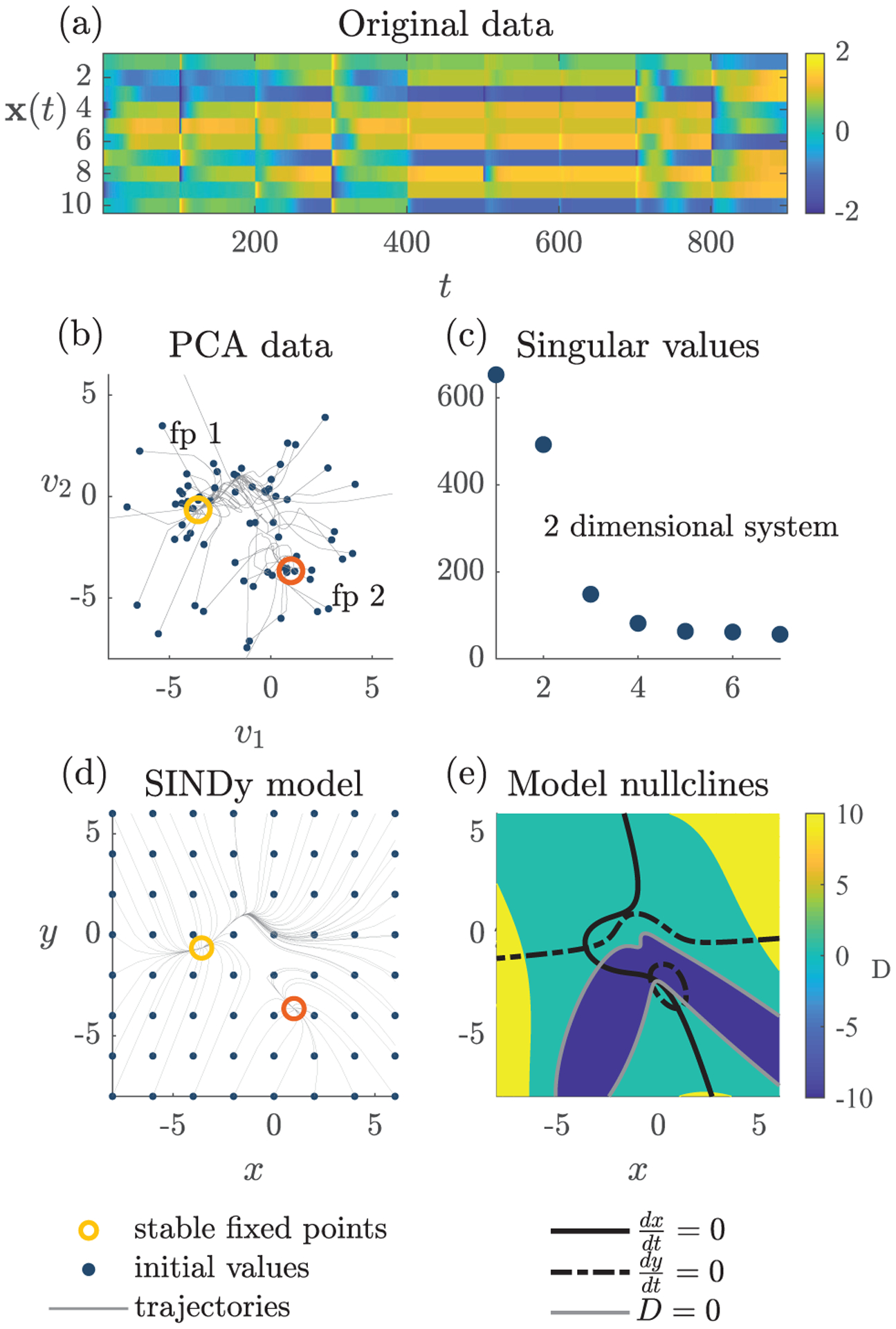
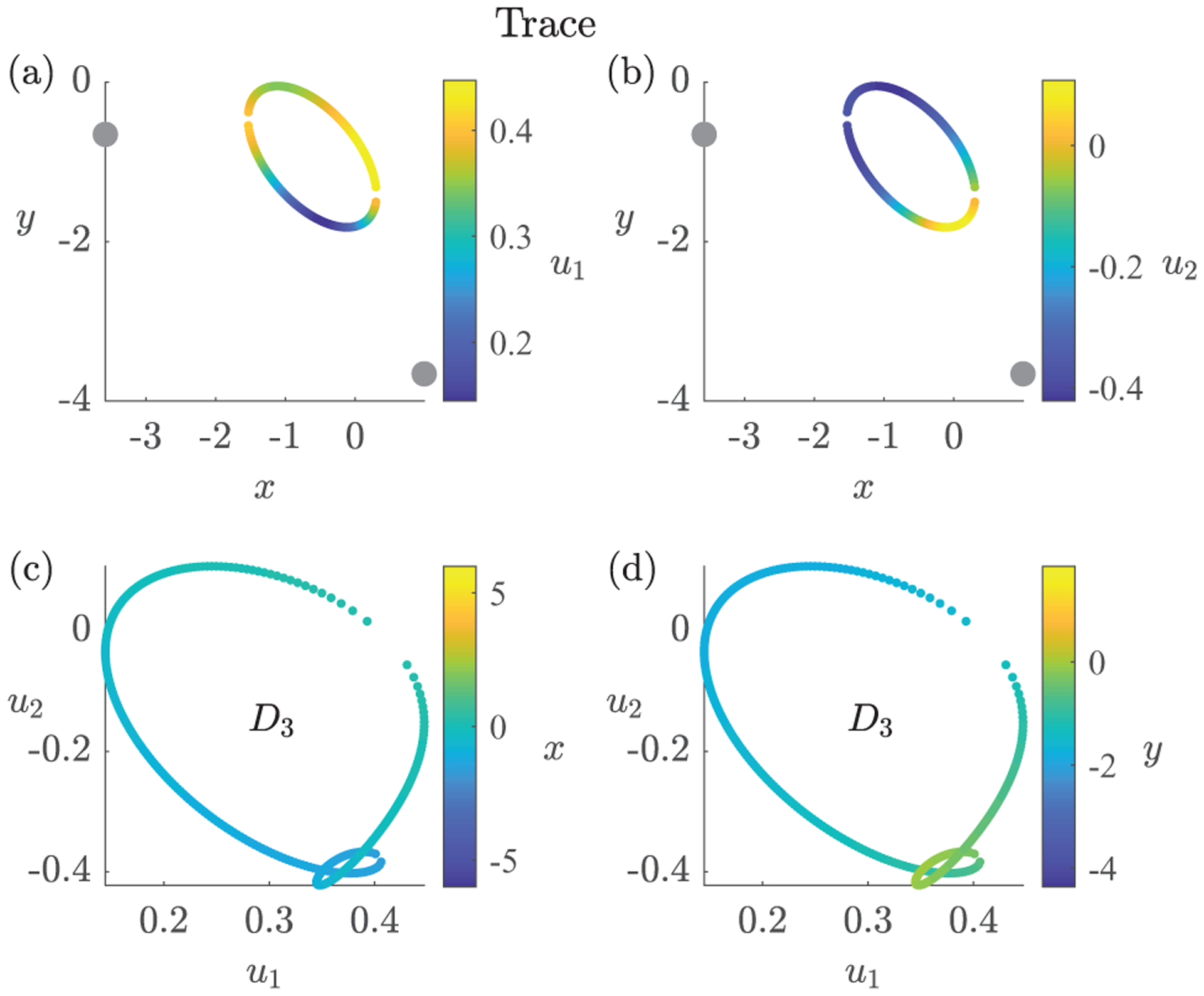
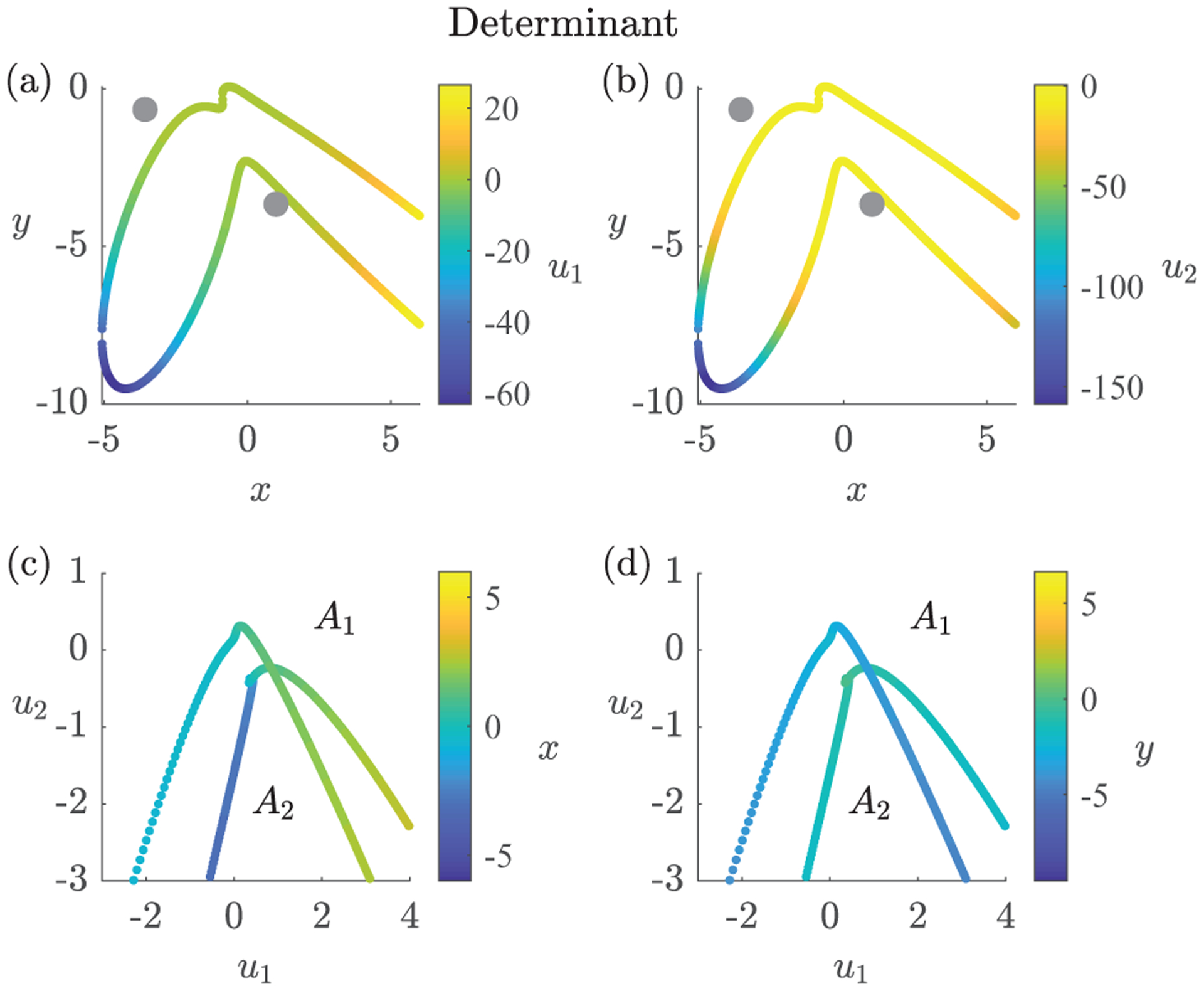
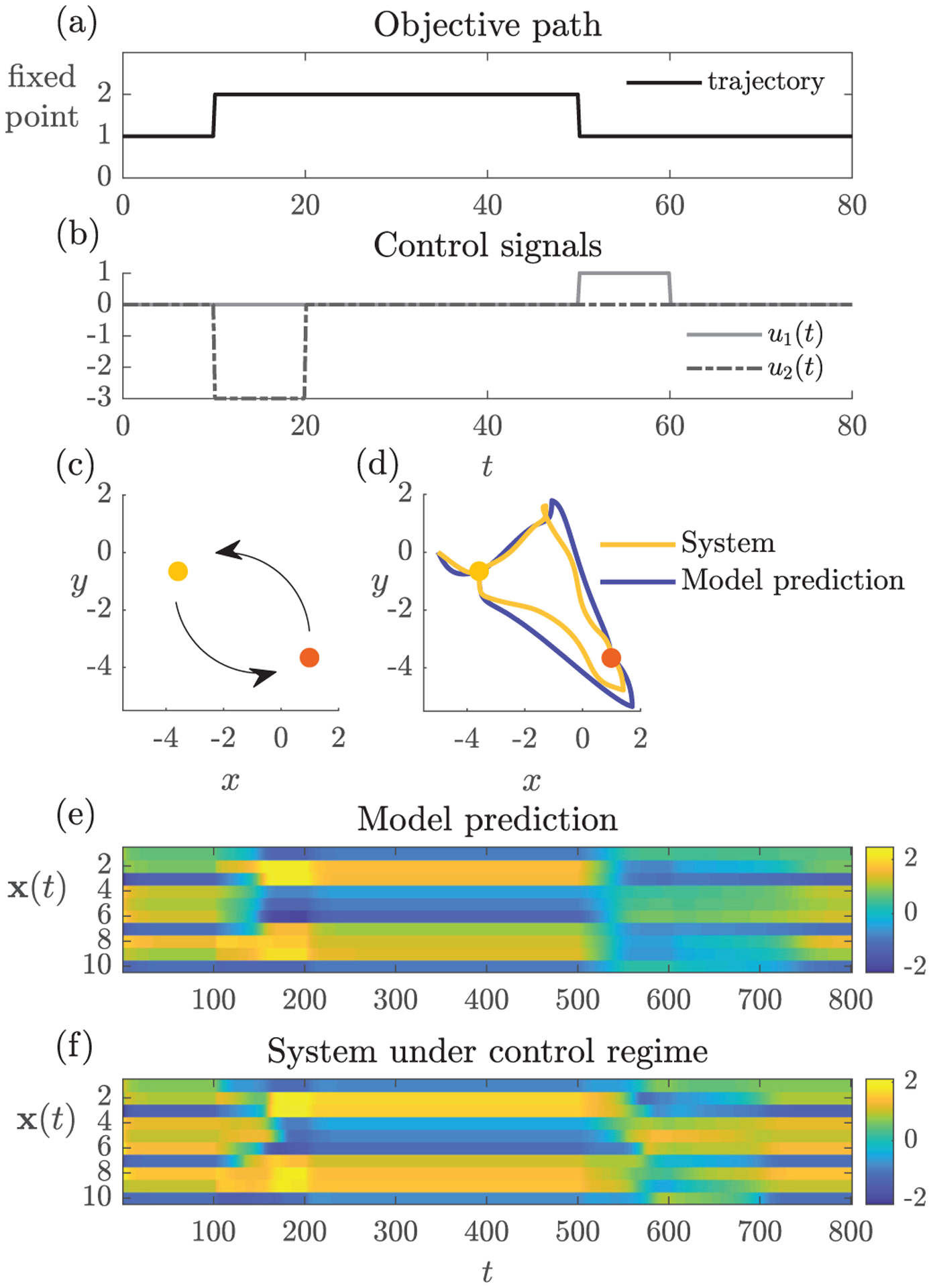
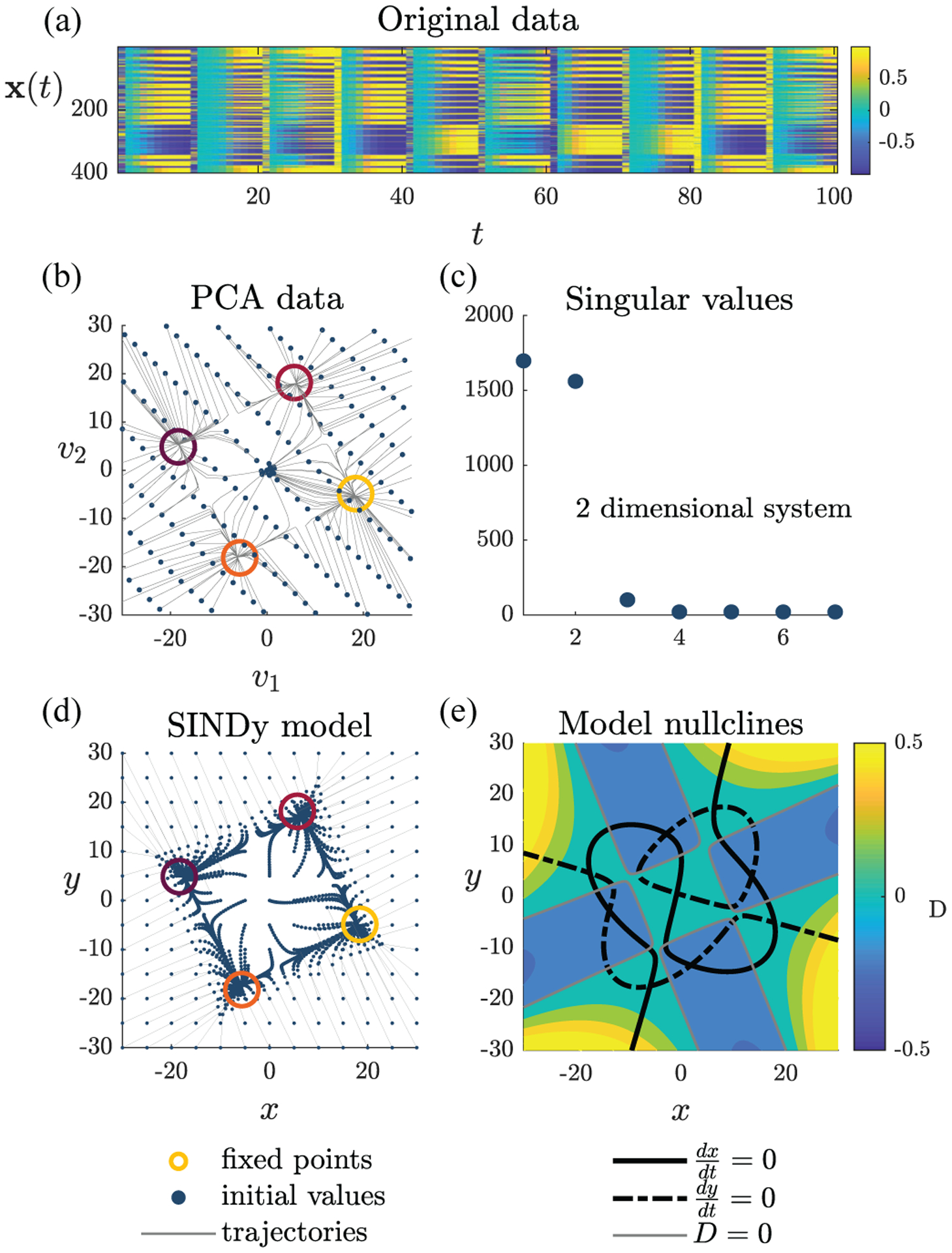
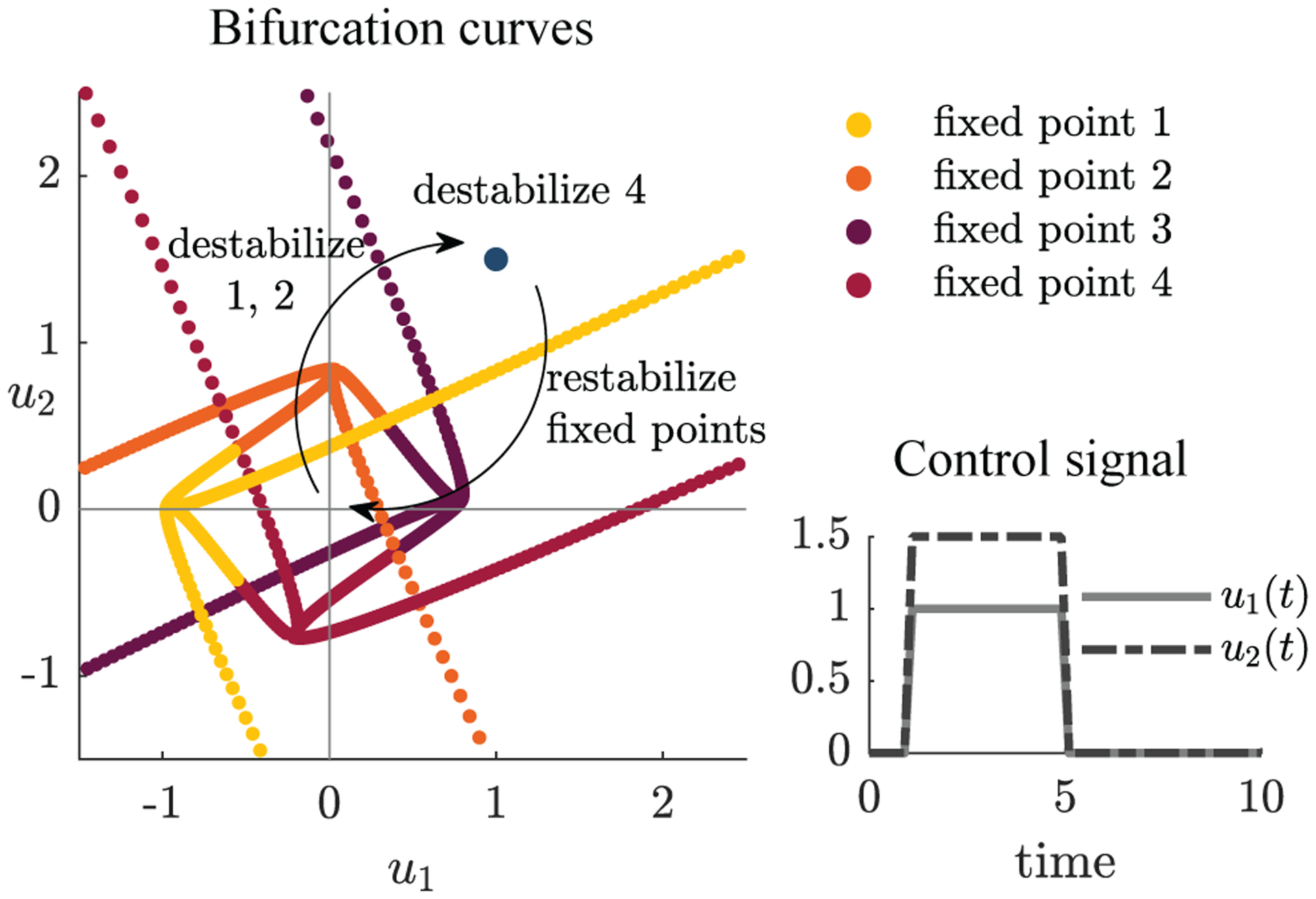
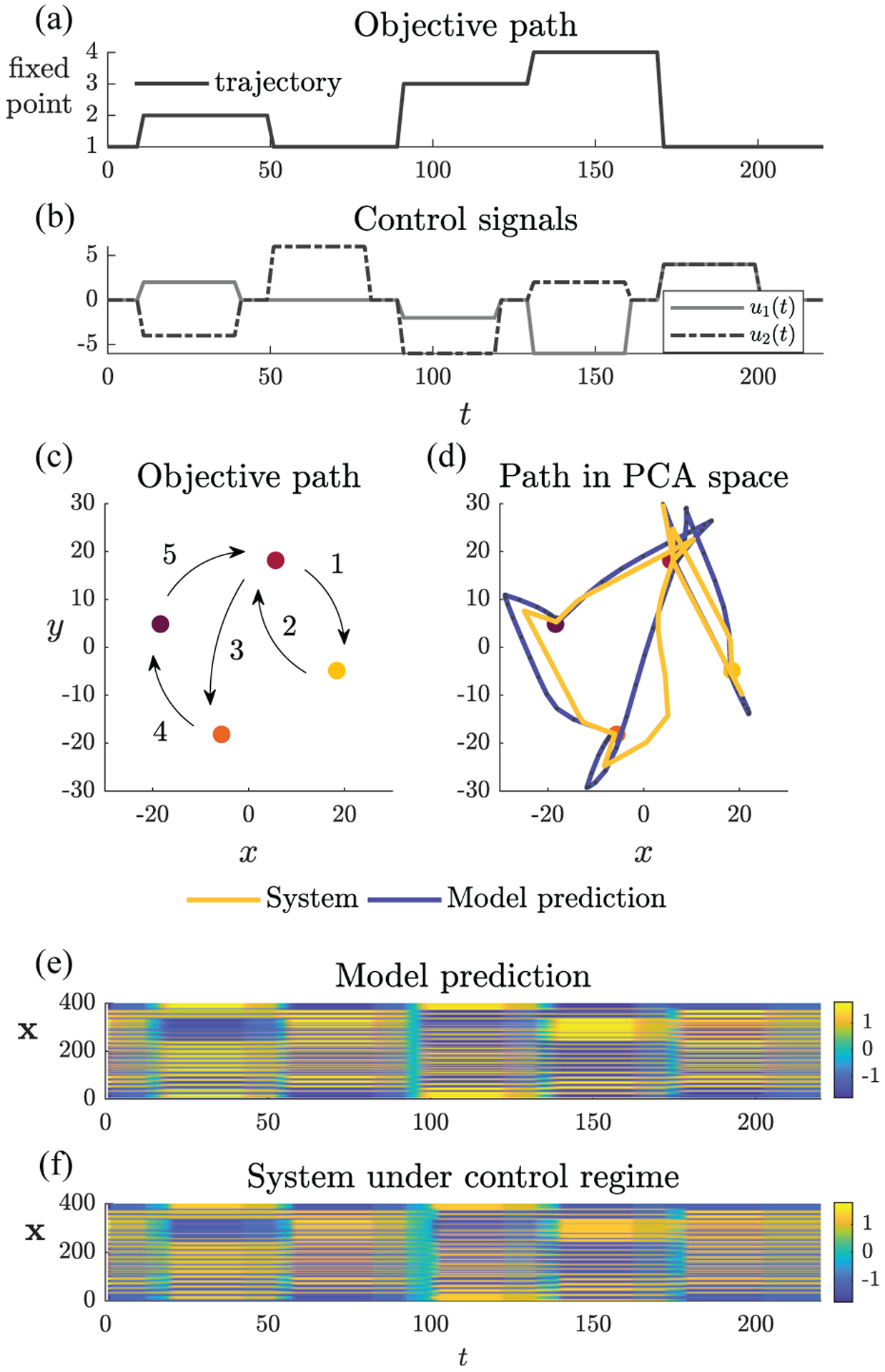
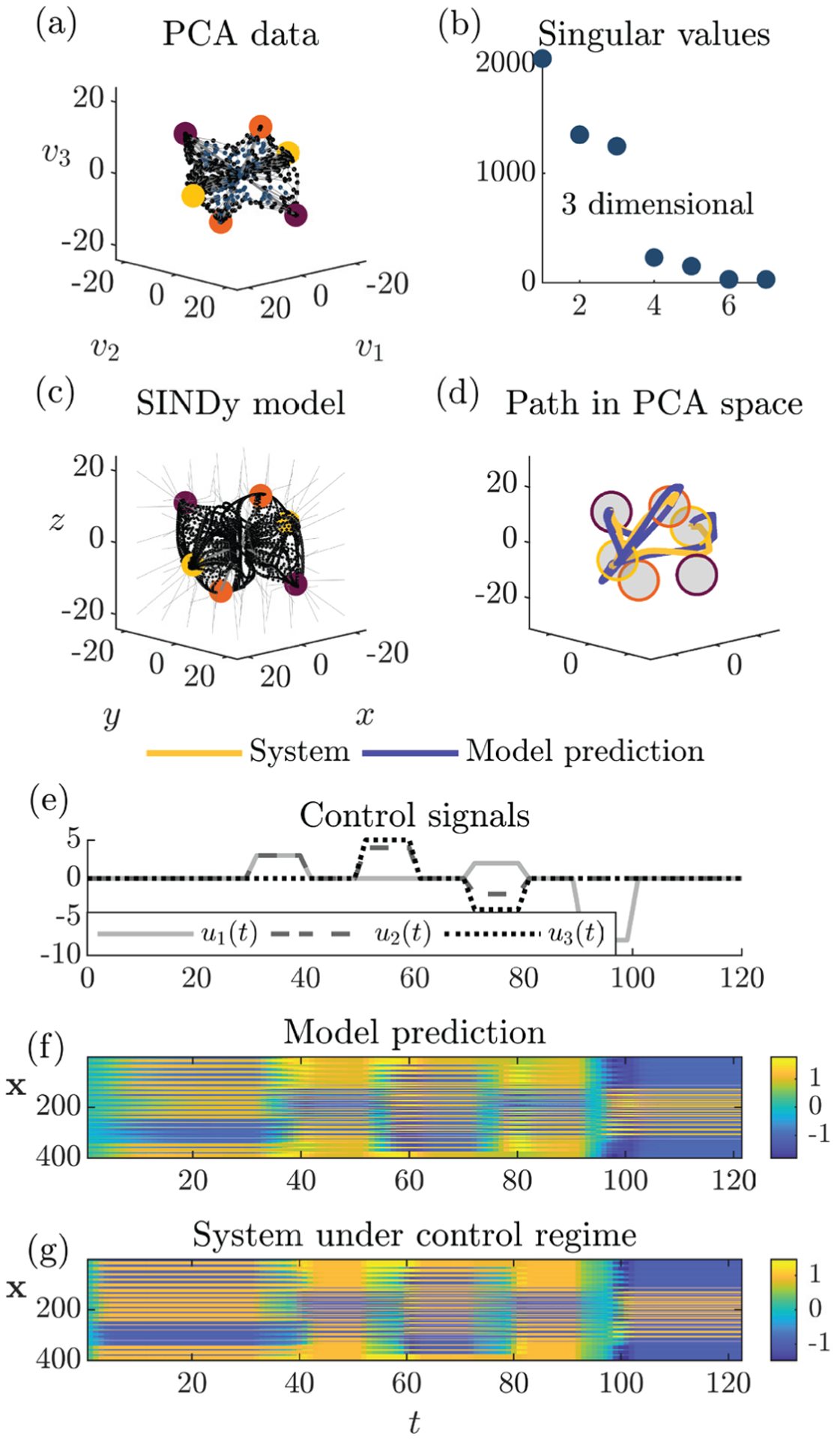
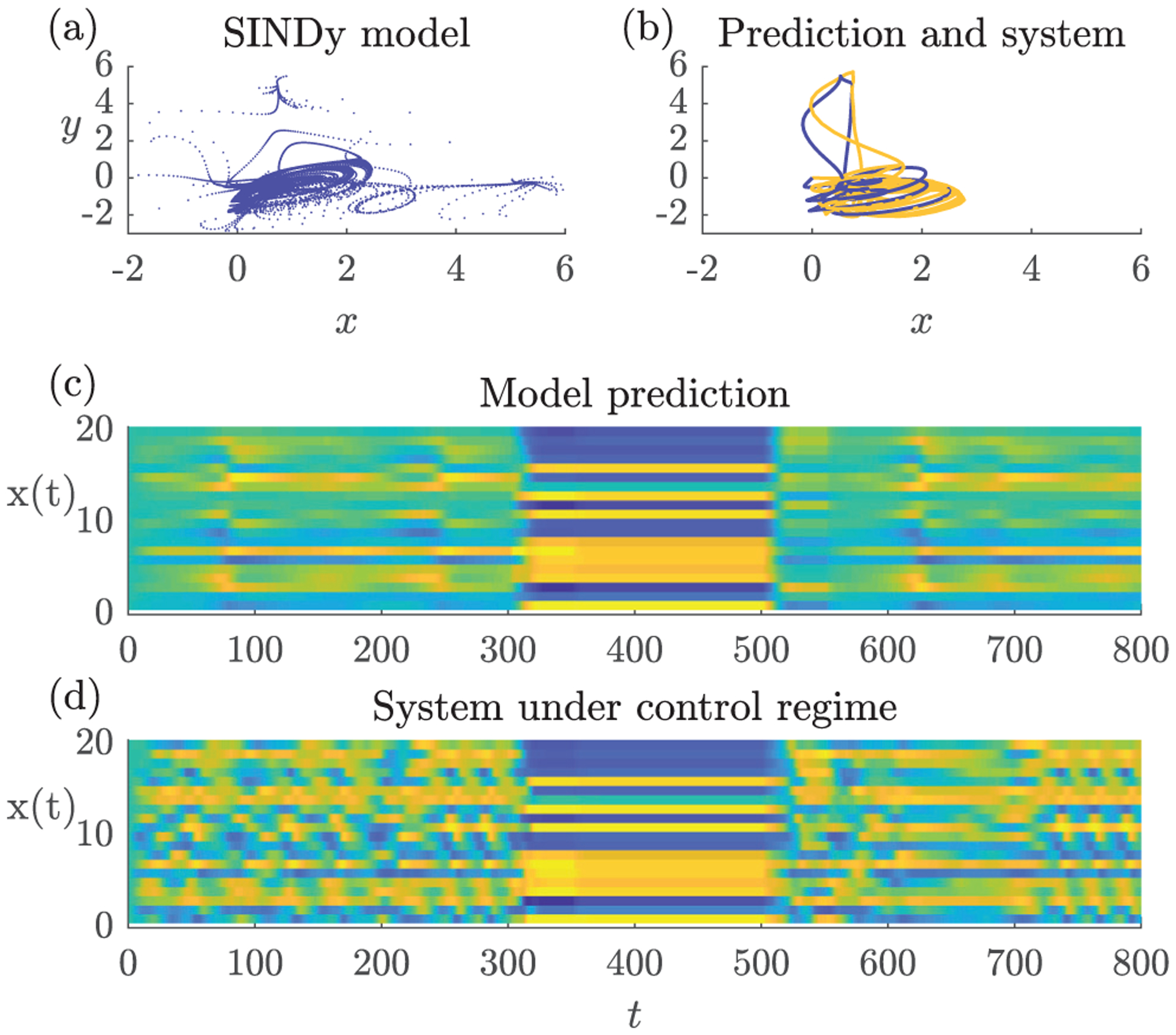
We develop a principled mathematical framework for controlling nonlinear, networked dynamical systems. Our method integrates dimensionality reduction, bifurcation theory, and emerging model discovery tools to find low-dimensional subspaces where feed-forward control can be used to manipulate a system to a desired outcome. The method leverages the fact that many high-dimensional networked systems have many fixed points, allowing for the computation of control signals that will move the system between any pair of fixed points. The sparse identification of nonlinear dynamics (SINDy) algorithm is used to fit a nonlinear dynamical system to the evolution on the dominant, low-rank subspace. This then allows us to use bifurcation theory to find collections of constant control signals that will produce the desired objective path for a prescribed outcome. Specifically, we can destabilize a given fixed point while making the target fixed point an attractor. The discovered control signals can be easily projected back to the original high-dimensional state and control space. We illustrate our nonlinear control procedure on established bistable, low-dimensional biological systems, showing how control signals are found that generate switches between the fixed points. We then demonstrate our control procedure for high-dimensional systems on random high-dimensional networks and Hopfield memory networks.
Keywords: Nonlinear control systems; bifurcation; limit-cycles; open-loop systems; pulse-based switching.
Figures
References
-
- Rabinovich M, Huerta R, and Laurent G, “Transient dynamics for neural processing,” Science, vol. 321, no. 5885, pp. 48–50, 2008, publisher: American Association for the Advancement of Science. - PubMed
-
- Brunton SL and Kutz JN, Data-driven science and engineering: machine learning, dynamical systems, and control. Cambridge, United Kingdom; New York, NY: Cambridge University Press, 2019.
-
- Kato S, Kaplan H, Schrödel T, Skora S, Lindsay T, Yemini E, Lockery S, and Zimmer M, “Global brain dynamics embed the motor command sequence of Caenorhabditis elegans,” Cell, vol. 163, no. 3, pp. 656–669, Oct. 2015. [Online]. Available: https://linkinghub.elsevier.com/retrieve/pii/S0092867415011964 - PubMed
-
- Marvel SA, Kleinberg J, Kleinberg RD, and Strogatz SH, “Continuous-time model of structural balance,” PNAS, vol. 108, no. 5, pp. 1771–1776, Feb. 2011. [Online]. Available: http://www.pnas.org/content/108/5/1771 - PMC - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources