

A brain-computer interface that evokes tactile sensations improves robotic arm control
- PMID: 34016775
- PMCID: PMC8715714
- DOI: 10.1126/science.abd0380
A brain-computer interface that evokes tactile sensations improves robotic arm control
Abstract
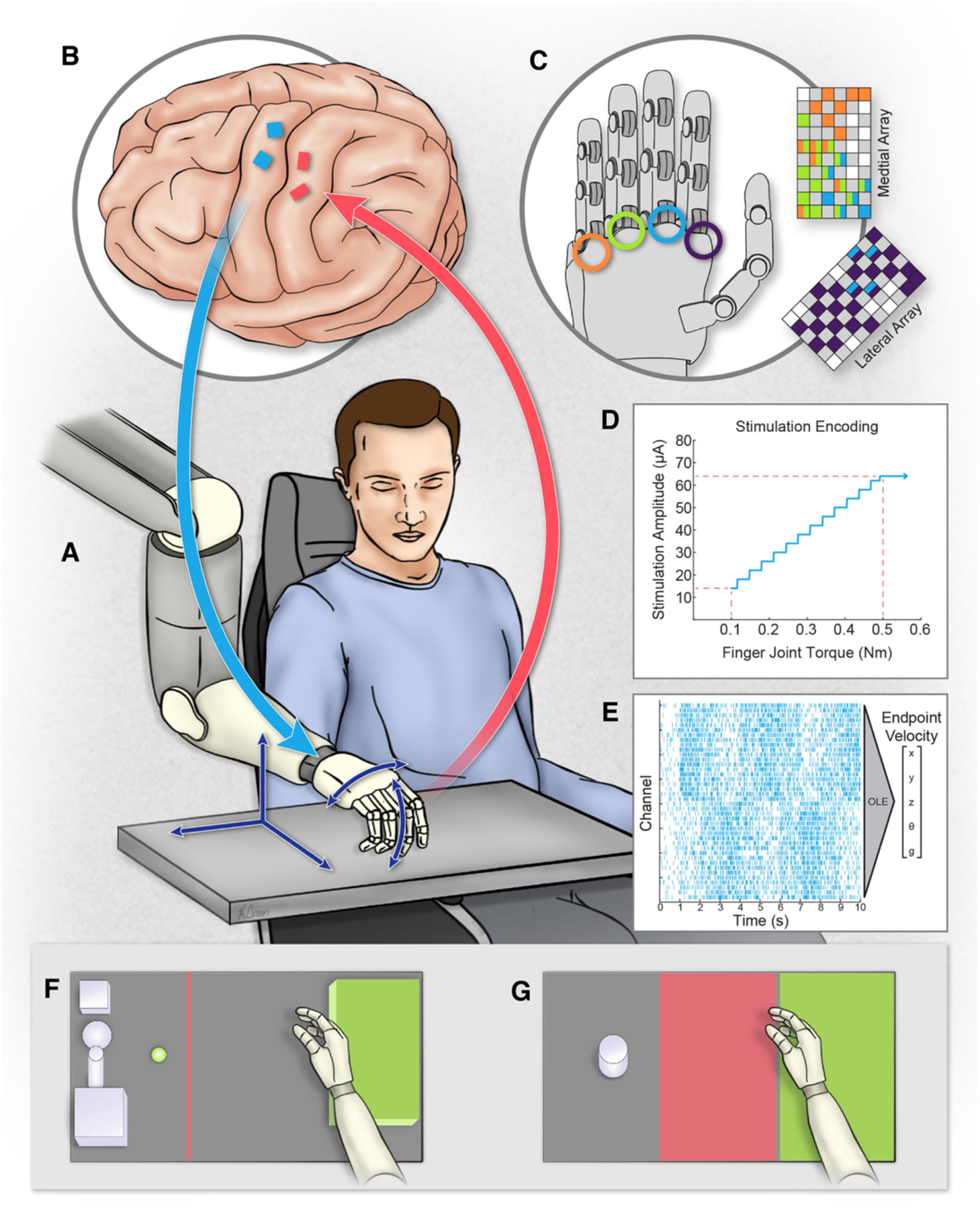
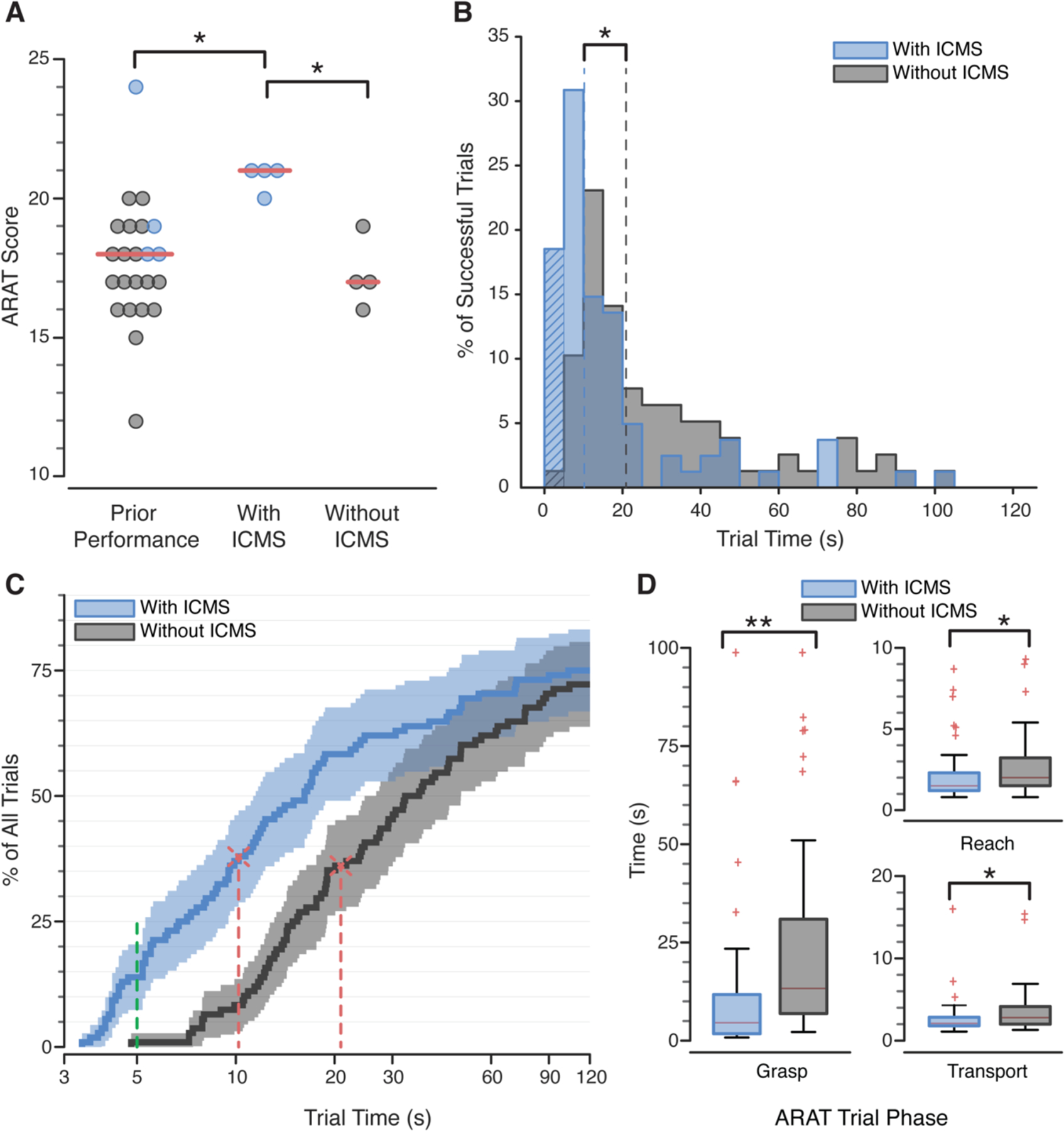
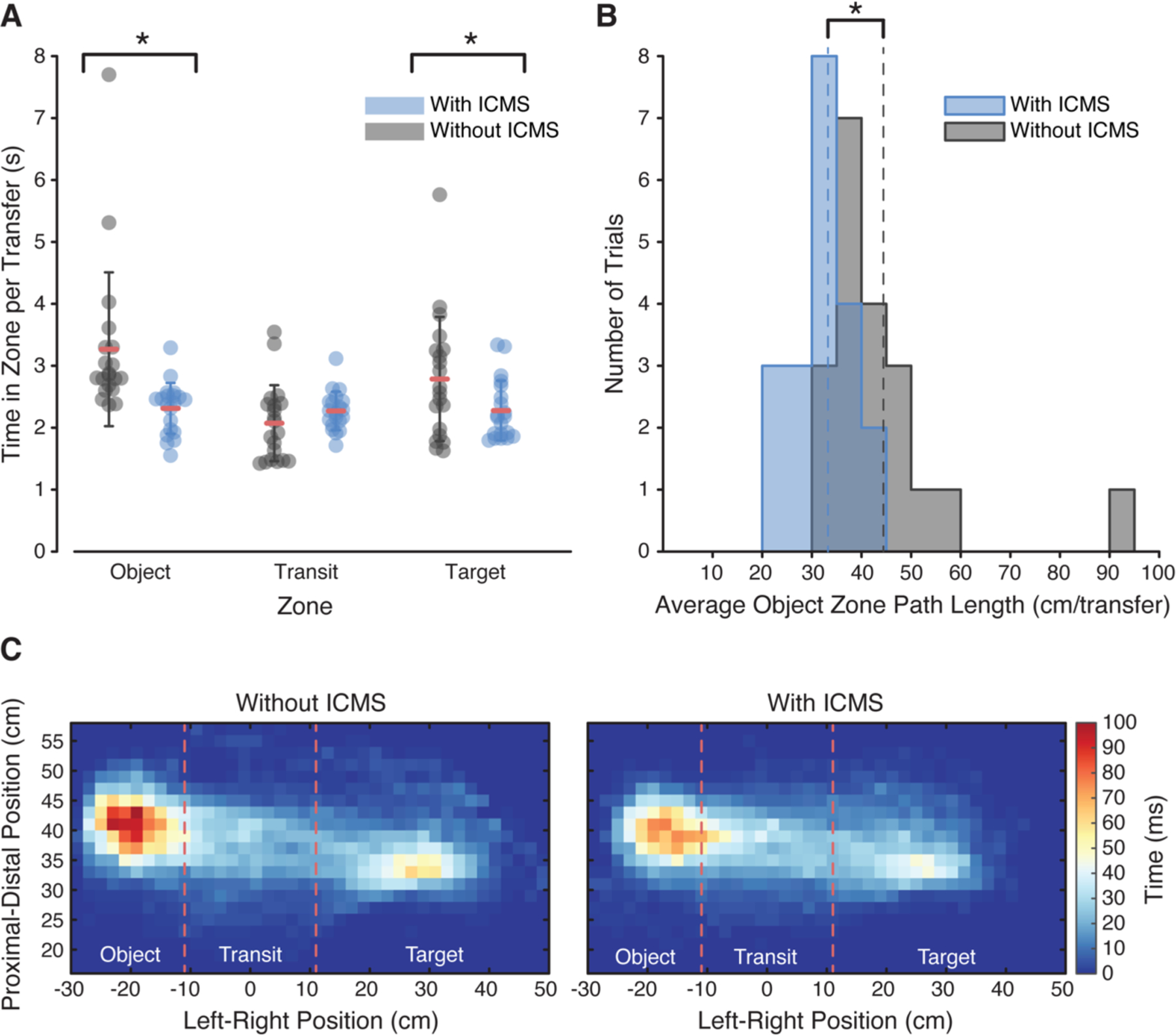
Prosthetic arms controlled by a brain-computer interface can enable people with tetraplegia to perform functional movements. However, vision provides limited feedback because information about grasping objects is best relayed through tactile feedback. We supplemented vision with tactile percepts evoked using a bidirectional brain-computer interface that records neural activity from the motor cortex and generates tactile sensations through intracortical microstimulation of the somatosensory cortex. This enabled a person with tetraplegia to substantially improve performance with a robotic limb; trial times on a clinical upper-limb assessment were reduced by half, from a median time of 20.9 to 10.2 seconds. Faster times were primarily due to less time spent attempting to grasp objects, revealing that mimicking known biological control principles results in task performance that is closer to able-bodied human abilities.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Conflict of interest statement
Figures
Comment in
-
Putting touch into action.Science. 2021 May 21;372(6544):791-792. doi: 10.1126/science.abi7262. Science. 2021. PMID: 34016768 No abstract available.
-
Bidirectional brain-computer interface aids robotic arm control.Nat Rev Neurol. 2021 Aug;17(8):462. doi: 10.1038/s41582-021-00527-3. Nat Rev Neurol. 2021. PMID: 34099912 No abstract available.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
