

Bioinspired Soft Robots Based on the Moisture-Responsive Graphene Oxide
- PMID: 34026430
- PMCID: PMC8132057
- DOI: 10.1002/advs.202002464
Bioinspired Soft Robots Based on the Moisture-Responsive Graphene Oxide
Abstract
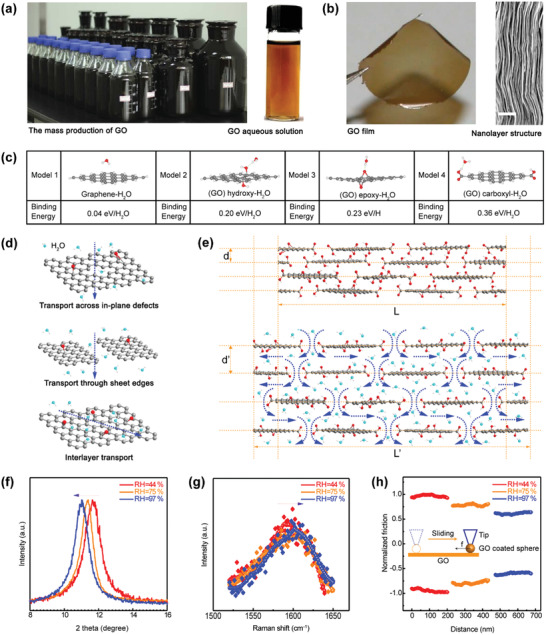
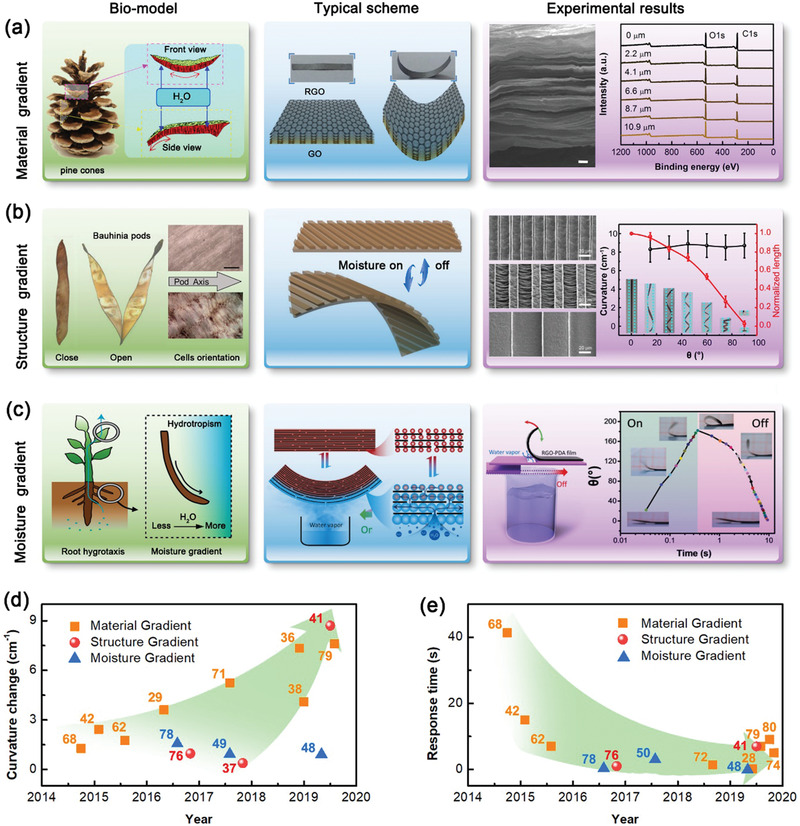
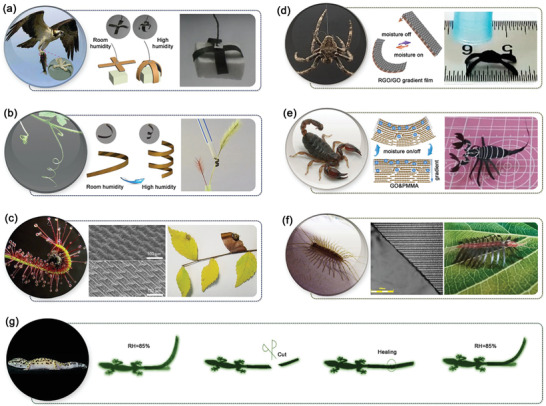
Graphene oxide (GO), which has many oxygen functional groups, is a promising candidate for use in moisture-responsive sensors and actuators due to the strong water-GO interaction and the ultrafast transport of water molecules within the stacked GO sheets. In the last 5 years, moisture-responsive actuators based on GO have shown distinct advantages over other stimuli-responsive materials and devices. Particularly, inspired by nature organisms, various moisture-enabled soft robots have been successfully developed via rational assembly of the GO-based actuators. Herein, the milestones in the development of moisture-responsive soft robots based on GO are summarized. In addition, the working mechanisms, design principles, current achievement, and prospects are also comprehensively reviewed. In particular, the GO-based soft robots are at the forefront of the advancement of automatable smart devices.
Keywords: actuators; bionics; graphene oxide; moisture responsiveness; soft robots; water molecules.
© 2021 The Authors. Advanced Science published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Gradient Assembly of Polymer Nanospheres and Graphene Oxide Sheets for Dual-Responsive Soft Actuators.ACS Appl Mater Interfaces. 2019 Oct 9;11(40):37130-37138. doi: 10.1021/acsami.9b13412. Epub 2019 Sep 24. ACS Appl Mater Interfaces. 2019. PMID: 31500405
-
Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions.Acc Chem Res. 2022 Jun 7;55(11):1533-1545. doi: 10.1021/acs.accounts.2c00046. Epub 2022 Apr 12. Acc Chem Res. 2022. PMID: 35413187
-
Multi-responsive and programmable actuators made with nacre-inspired graphene oxide-bacterial cellulose film.Soft Matter. 2022 Dec 7;18(47):9057-9068. doi: 10.1039/d2sm01380k. Soft Matter. 2022. PMID: 36416498
-
Bioinspired Stimuli-Responsive Materials for Soft Actuators.Biomimetics (Basel). 2024 Feb 21;9(3):128. doi: 10.3390/biomimetics9030128. Biomimetics (Basel). 2024. PMID: 38534813 Free PMC article. Review.
-
Electro-responsive actuators based on graphene.Innovation (Camb). 2021 Sep 24;2(4):100168. doi: 10.1016/j.xinn.2021.100168. eCollection 2021 Nov 28. Innovation (Camb). 2021. PMID: 34746905 Free PMC article. Review.
Cited by
-
Macromolecular bridging-enhanced holey graphene oxide-based film and its humidity deformation response.iScience. 2022 Nov 4;25(12):105496. doi: 10.1016/j.isci.2022.105496. eCollection 2022 Dec 22. iScience. 2022. PMID: 36419852 Free PMC article.
-
Photoresponsive hydrogel-based soft robot: A review.Mater Today Bio. 2023 May 10;20:100657. doi: 10.1016/j.mtbio.2023.100657. eCollection 2023 Jun. Mater Today Bio. 2023. PMID: 37229213 Free PMC article. Review.
-
Elastic circular organic microcrystals prepared by photoinduced delamination.Nat Commun. 2025 May 28;16(1):4933. doi: 10.1038/s41467-025-59670-w. Nat Commun. 2025. PMID: 40436821 Free PMC article.
-
Fabrication and Actuation of Magnetic Shape-Memory Materials.ACS Appl Mater Interfaces. 2023 Nov 15;15(45):53017-53030. doi: 10.1021/acsami.3c14091. Epub 2023 Nov 4. ACS Appl Mater Interfaces. 2023. PMID: 37924281 Free PMC article.
-
Micro-/Nano-Structures Fabricated by Laser Technologies for Optoelectronic Devices.Front Chem. 2021 Dec 16;9:823715. doi: 10.3389/fchem.2021.823715. eCollection 2021. Front Chem. 2021. PMID: 34976958 Free PMC article. Review.
References
-
- Acome E., Mitchell S. K., Morrissey T. G., Emmett M. B., Benjamin C., King M., Radakovitz M., Keplinger C., Science 2018, 359, 61. - PubMed
-
- Acerce M., Akdogan E. K., Chhowalla M., Nature 2017, 549, 370. - PubMed
-
- Gladman A. S., Matsumoto E. A., Nuzzo R. G., Mahadevan L., Lewis J. A., Nat. Mater. 2016, 15, 413. - PubMed
-
- Ricotti L., Trimmer B., Feinberg A. W., Raman R., Parker K. K., Bashir R., Sitti M., Martel S., Dario P., Menciassi A., Sci. Rob. 2017, 2, eaaq0495. - PubMed
-
- Han D. D., Zhang Y. L., Ma J. N., Liu Y. Q., Han B., Sun H. B., Adv. Mater. 2016, 28, 8328. - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources