

Utilizing Tactile Feedback for Biomimetic Grasping Control in Upper Limb Prostheses
- PMID: 34035872
- PMCID: PMC8142551
- DOI: 10.1109/icsens.2013.6688445
Utilizing Tactile Feedback for Biomimetic Grasping Control in Upper Limb Prostheses
Abstract
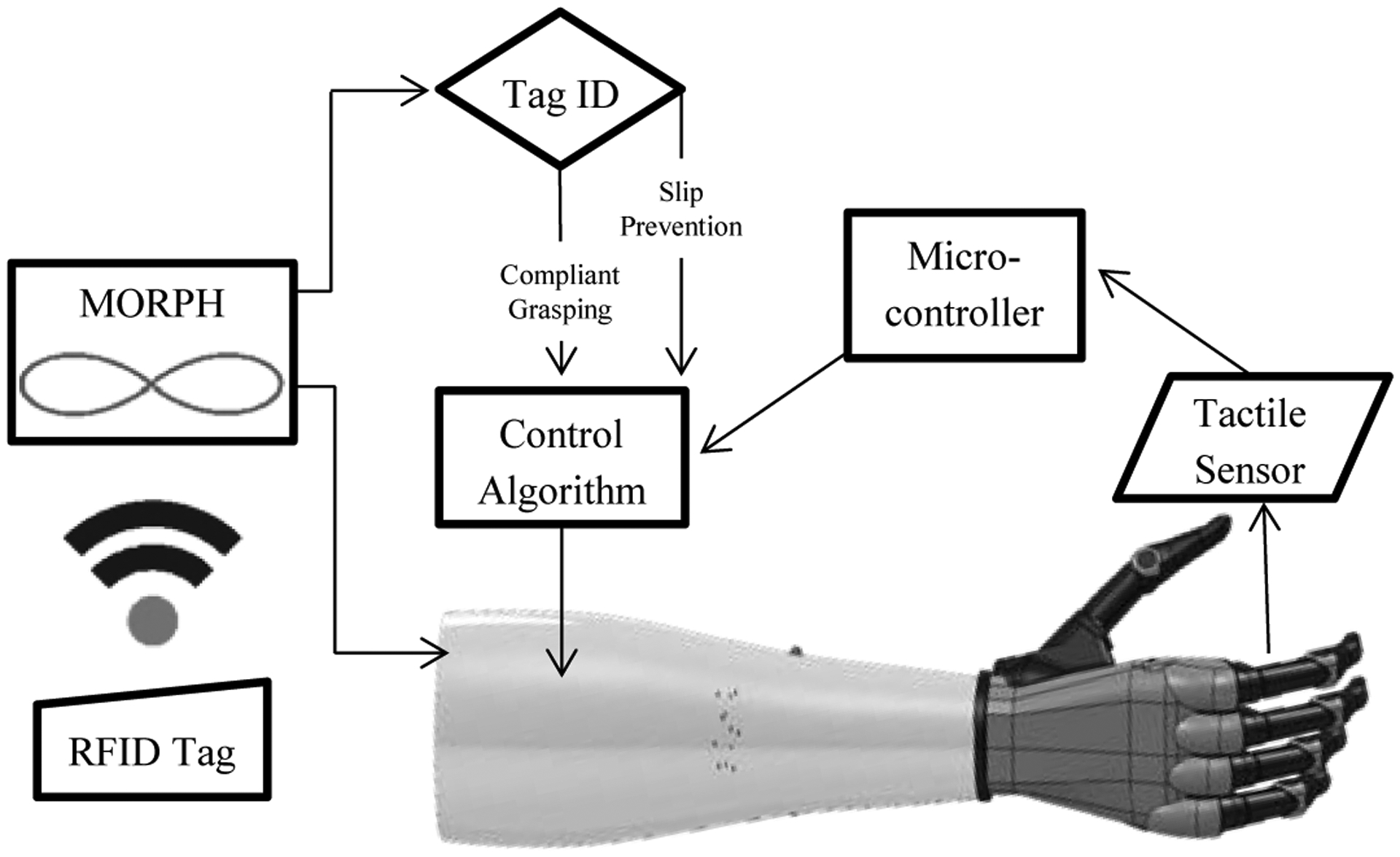
A biomimetic system for enhancing the control and reliability of grasping with prosthetic hands was designed and experimentally evaluated. Barometric pressure sensors as well as a force-sensitive resistor (FSR) were placed on a prosthetic hand to provide valuable tactile feedback. Contact and slip detection grip control algorithms were developed to interpret force signals for enhancing stable grasping. Recent advances in radio-frequency identification (RFID) technology enable the amputee to select between grip control strategies based on the desired object to be grasped. Experimental results indicate that the control algorithms are capable of utilizing real-time force responses to detect object contact as well as slip. By allowing the user to act as a high-level controller with RFID technology, a multi-faceted low-level controller that responds to tactile feedback can be developed for enhancing grasping functionality in prosthetic hands.
Figures





Similar articles
-
Tactile Feedback in Upper Limb Prosthetic Devices Using Flexible Textile Force Sensors.Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014 Aug;2014:114-119. doi: 10.1109/biorob.2014.6913762. Epub 2014 Oct 2. Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014. PMID: 33936859 Free PMC article.
-
Neuromimetic Event-Based Detection for Closed-Loop Tactile Feedback Control of Upper Limb Prostheses.IEEE Trans Haptics. 2016 Apr-Jun;9(2):196-206. doi: 10.1109/TOH.2016.2564965. Epub 2016 May 9. IEEE Trans Haptics. 2016. PMID: 27777640 Free PMC article.
-
Grasping Force Control of Multi-Fingered Robotic Hands through Tactile Sensing for Object Stabilization.Sensors (Basel). 2020 Feb 14;20(4):1050. doi: 10.3390/s20041050. Sensors (Basel). 2020. PMID: 32075193 Free PMC article.
-
Literature Review on Needs of Upper Limb Prosthesis Users.Front Neurosci. 2016 May 12;10:209. doi: 10.3389/fnins.2016.00209. eCollection 2016. Front Neurosci. 2016. PMID: 27242413 Free PMC article. Review.
-
Robots have grasped and manipulated the imagination since 1839.Sci Robot. 2021 May 26;6(54):eabi9227. doi: 10.1126/scirobotics.abi9227. Sci Robot. 2021. PMID: 34043545 Review.
Cited by
-
Tactile Feedback in Upper Limb Prosthetic Devices Using Flexible Textile Force Sensors.Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014 Aug;2014:114-119. doi: 10.1109/biorob.2014.6913762. Epub 2014 Oct 2. Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. 2014. PMID: 33936859 Free PMC article.
-
Learning-Based Slip Detection for Robotic Fruit Grasping and Manipulation under Leaf Interference.Sensors (Basel). 2022 Jul 22;22(15):5483. doi: 10.3390/s22155483. Sensors (Basel). 2022. PMID: 35897992 Free PMC article.
References
-
- Lake C and Dodson R, “Progressive Upper Limb Prosthetics,” Phys. Med. Rehabil. Clin. N. Am, vol. 17, pp. 49–72, 2, 2006. - PubMed
-
- Puchhammer G, “The tactile slip sensor: integration of a miniaturized sensory device on an myoelectric hand,” Ortho. Technol. Q, vol. 1, pp. 7–12, 2000.
-
- Engeberg ED and Meek SG, “Adaptive object slip prevention for prosthetic hands through proportional-derivative shear force feedback,” in Proc. IEEE Intell. Robots Syst. Conf, 2008, pp. 1940–1945.
-
- Engeberg E, Frankel M and Meek S, “Biomimetic grip force compensation based on acceleration of a prosthetic wrist under sliding mode control,” in Proc. IEEE Int. Conf. Rob. Biomimetics, 2009, pp. 210–215.
-
- Matulevich B, Pandit V, Loeb G, Fishel J and Lin C, “Utility of conact detection and compliant fingertips in prosthetic hand control while grasping fragile objects,” unpublished.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources