

Experimental assessment of a linear actuator driven by magnetorheological clutches for automotive active suspensions
- PMID: 34040332
- PMCID: PMC8114334
- DOI: 10.1177/1045389X21991237
Experimental assessment of a linear actuator driven by magnetorheological clutches for automotive active suspensions
Abstract
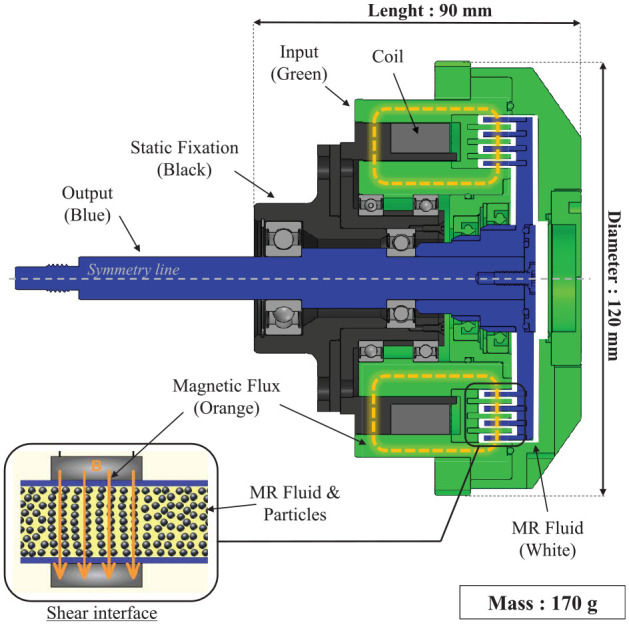
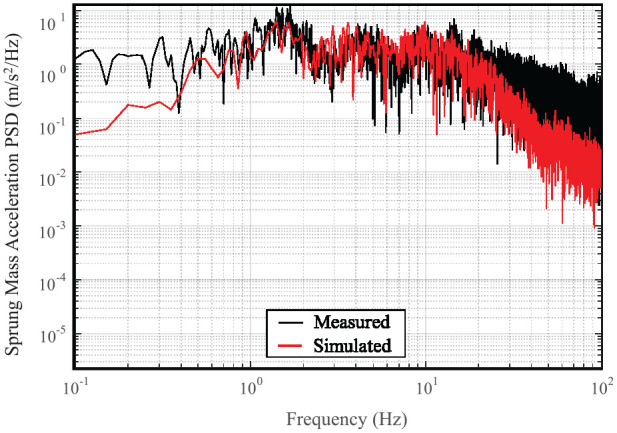
The main functions of automotive suspensions are to improve passenger comfort as well as vehicle dynamic performance. Simultaneously satisfying these functions is not possible because they require opposing suspension adjustments. This fundamental design trade-off can be solved with an active suspension system providing real-time modifications of the suspension behavior and vehicle attitude corrections. However, current active suspension actuator technologies have yet to reach a wide-spread commercial adoption due to excessive costs and performance limitations. This paper presents a design study assessing the potential of magnetorheological clutch actuators for automotive active suspension applications. An experimentally validated dynamic model is used to derive meaningful design requirements. An actuator design is proposed and built using a motor to feed counter-rotating MR clutches to provide upward and downward forces. Experimental characterization shows that all intended design requirements are met, and that the actuator can output a peak force of ±5300 N, a peak linear speed of ±1.9 m/s and a blocked-output force bandwidth of 92 Hz. When compared to other relevant technologies, the MR approach simultaneously shows both better force density and speeds (bandwidth) while adding minimal costs and weight. Results from this experimental assessment suggest that MR slippage actuation is promising for automotive active suspensions.
Keywords: Automotive; active suspension; and pinion mechanism; controlled slippage actuator; magnetorheological clutches; rack.
© The Author(s) 2021.
Conflict of interest statement
Declaration of conflicting interests: The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Figures



















Similar articles
-
Bridging the gap between haptic devices and cobots with highly geared magnetorheological actuators.Sci Rep. 2025 Apr 24;15(1):14363. doi: 10.1038/s41598-025-98999-6. Sci Rep. 2025. PMID: 40274945 Free PMC article.
-
High-performance magneto-rheological clutches for direct-drive actuation: Design and development.J Intell Mater Syst Struct. 2021 Dec;32(20):2582-2600. doi: 10.1177/1045389X211006902. Epub 2021 Apr 16. J Intell Mater Syst Struct. 2021. PMID: 34764629 Free PMC article.
-
Identification of Control-Related Signal Path for Semi-Active Vehicle Suspension with Magnetorheological Dampers.Sensors (Basel). 2023 Jun 20;23(12):5770. doi: 10.3390/s23125770. Sensors (Basel). 2023. PMID: 37420933 Free PMC article.
-
Output feedback H∞ control for active suspension of in-wheel motor driven electric vehicle with control faults and input delay.ISA Trans. 2019 Sep;92:94-108. doi: 10.1016/j.isatra.2019.02.016. Epub 2019 Feb 25. ISA Trans. 2019. PMID: 30837127
-
Searching for a Stable High-Performance Magnetorheological Suspension.Adv Mater. 2018 Oct;30(42):e1704769. doi: 10.1002/adma.201704769. Epub 2018 Aug 27. Adv Mater. 2018. PMID: 30151957 Review.
Cited by
-
Coupled Field Analysis of Phenomena in Hybrid Excited Magnetorheological Fluid Brake.Sensors (Basel). 2022 Dec 29;23(1):358. doi: 10.3390/s23010358. Sensors (Basel). 2022. PMID: 36616957 Free PMC article.
-
Preliminary investigation of the design space of geared magnetorheological actuators for safer robotic manipulators.Front Robot AI. 2025 Jun 5;12:1581651. doi: 10.3389/frobt.2025.1581651. eCollection 2025. Front Robot AI. 2025. PMID: 40538888 Free PMC article.
-
Bridging the gap between haptic devices and cobots with highly geared magnetorheological actuators.Sci Rep. 2025 Apr 24;15(1):14363. doi: 10.1038/s41598-025-98999-6. Sci Rep. 2025. PMID: 40274945 Free PMC article.
References
-
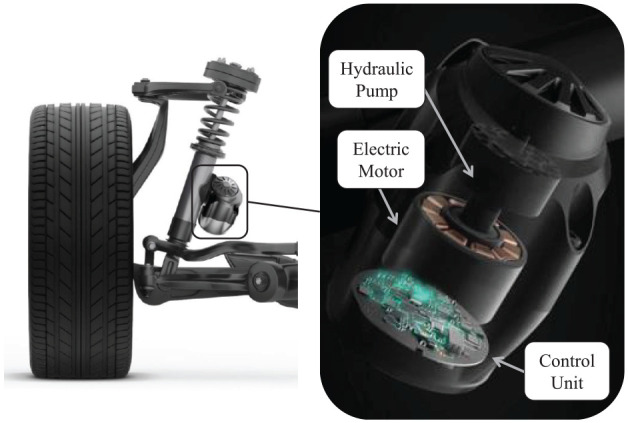
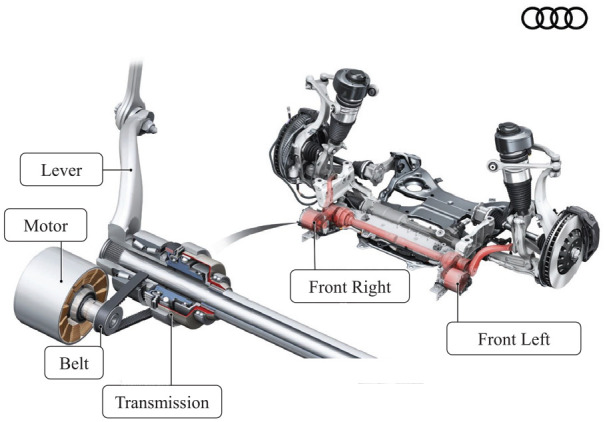
- Adcock I. (2017) Audi details new A8 active suspension. SAE International, 14 July 2017. Available at: https://www.sae.org/news/2017/07/audi-details-new-a8-active-suspension (accessed 9 November 2018).
-
- Åström KJ, Murray RM. (2009) Feedback Systems: An Introduction for Scientists and Engineers. Princeton: Princeton University Press. version V2.10b; (February 22, 2009).
-
- Audi (2017) Audi A8 - Active Chassis. Available at: https://www.audi.com/en/innovation/design/more_personal_comfort_a8_activ... (accessed 9 November 2018).
-
- Bégin MA, Chouinard P, Lebel LP, et al.. (2018) Experimental assessement of a controlled slippage magnetorheological actuator for active seat suspensions. IEEE/ASME Transactions on Mechatronics 23(4): 1800–1810.
-
- Chouinard P. (2014) Conception et validation expérimentale d’un système d’embrayages magnétorhéologiques à glissement continu pour les commandes de vol d’aéronefs. Sherbrooke, Québec, Canada.
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous