

Robotic hand augmentation drives changes in neural body representation
- PMID: 34043536
- PMCID: PMC7612043
- DOI: 10.1126/scirobotics.abd7935
Robotic hand augmentation drives changes in neural body representation
Abstract
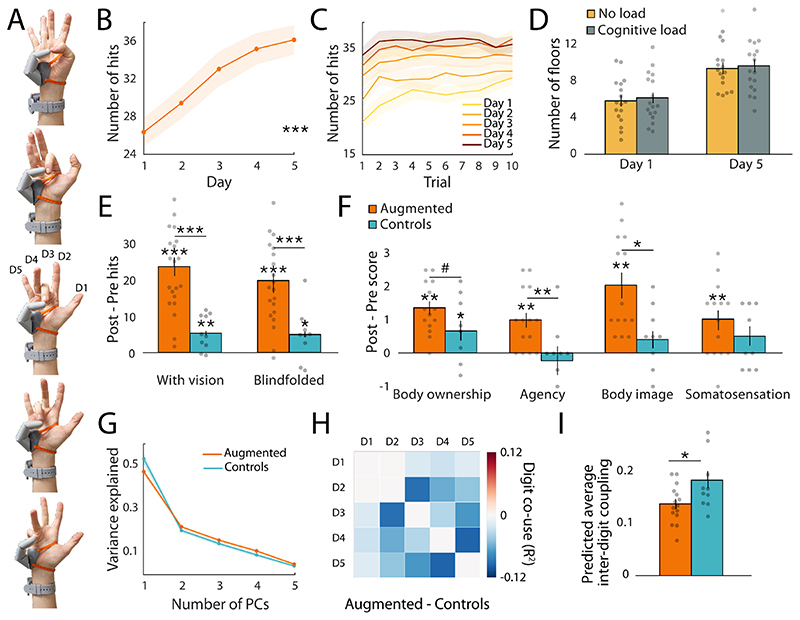
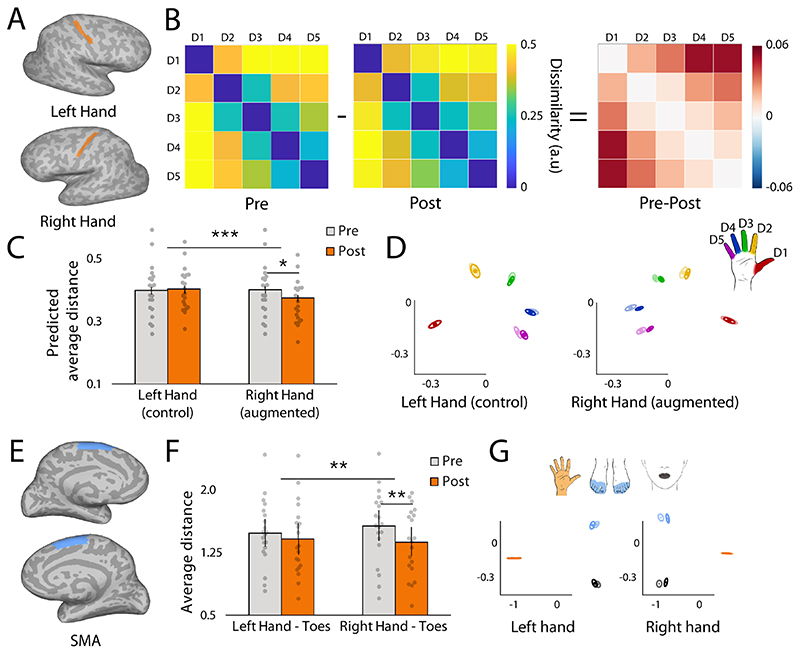
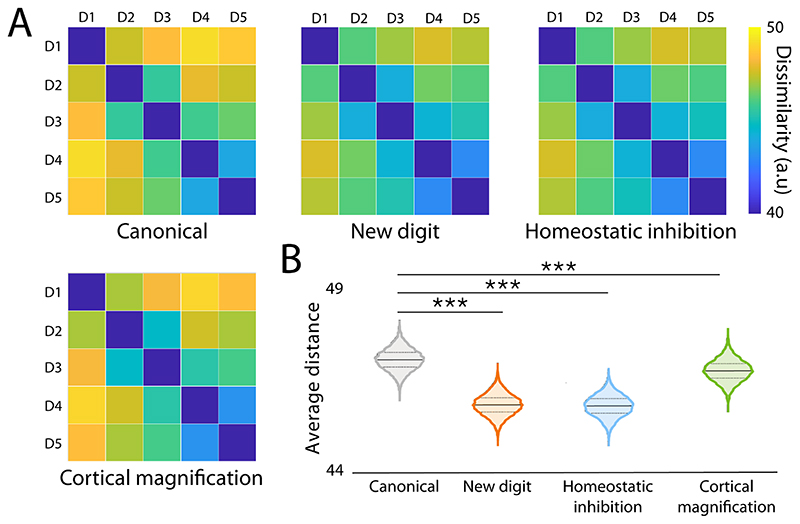
Humans have long been fascinated by the opportunities afforded through augmentation. This vision not only depends on technological innovations but also critically relies on our brain's ability to learn, adapt, and interface with augmentation devices. Here, we investigated whether successful motor augmentation with an extra robotic thumb can be achieved and what its implications are on the neural representation and function of the biological hand. Able-bodied participants were trained to use an extra robotic thumb (called the Third Thumb) over 5 days, including both lab-based and unstructured daily use. We challenged participants to complete normally bimanual tasks using only the augmented hand and examined their ability to develop hand-robot interactions. Participants were tested on a variety of behavioral and brain imaging tests, designed to interrogate the augmented hand's representation before and after the training. Training improved Third Thumb motor control, dexterity, and hand-robot coordination, even when cognitive load was increased or when vision was occluded. It also resulted in increased sense of embodiment over the Third Thumb. Consequently, augmentation influenced key aspects of hand representation and motor control. Third Thumb usage weakened natural kinematic synergies of the biological hand. Furthermore, brain decoding revealed a mild collapse of the augmented hand's motor representation after training, even while the Third Thumb was not worn. Together, our findings demonstrate that motor augmentation can be readily achieved, with potential for flexible use, reduced cognitive reliance, and increased sense of embodiment. Yet, augmentation may incur changes to the biological hand representation. Such neurocognitive consequences are crucial for successful implementation of future augmentation technologies.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Conflict of interest statement
Authors declare no competing interests.
Figures

Similar articles
-
Evaluating initial usability of a hand augmentation device across a large and diverse sample.Sci Robot. 2024 May 29;9(90):eadk5183. doi: 10.1126/scirobotics.adk5183. Epub 2024 May 29. Sci Robot. 2024. PMID: 38809995 Free PMC article.
-
An overview of robotic/mechanical devices for post-stroke thumb rehabilitation.Disabil Rehabil Assist Technol. 2018 Oct;13(7):683-703. doi: 10.1080/17483107.2018.1425746. Epub 2018 Jan 15. Disabil Rehabil Assist Technol. 2018. PMID: 29334274 Review.
-
Complex manipulation with a simple robotic hand through contact breaking and caging.Sci Robot. 2021 May 12;6(54):eabd2666. doi: 10.1126/scirobotics.abd2666. Sci Robot. 2021. PMID: 34043534
-
Emerging of new bioartificial corticospinal motor synergies using a robotic additional thumb.Sci Rep. 2021 Sep 16;11(1):18487. doi: 10.1038/s41598-021-97876-2. Sci Rep. 2021. PMID: 34531441 Free PMC article.
-
Dextrous hands: human, prosthetic, and robotic.Presence (Camb). 1997 Feb;6(1):29-56. doi: 10.1162/pres.1997.6.1.29. Presence (Camb). 1997. PMID: 11540644 Review.
Cited by
-
Rewiring the evolution of the human hand: How the embodiment of a virtual bionic tool improves behavior.iScience. 2024 Jun 6;27(6):109937. doi: 10.1016/j.isci.2024.109937. eCollection 2024 Jun 21. iScience. 2024. PMID: 39055602 Free PMC article.
-
Improving Body Representation and Motor Skills with a Preschool Education Program: A Preliminary Study.Children (Basel). 2022 Jan 17;9(1):117. doi: 10.3390/children9010117. Children (Basel). 2022. PMID: 35053742 Free PMC article.
-
Neural correlates of phantom motor execution: A functional neuroimaging systematic review and meta-analysis.Cortex. 2024 Dec;181:295-304. doi: 10.1016/j.cortex.2024.09.001. Epub 2024 Sep 11. Cortex. 2024. PMID: 39341715
-
Adapting Ourselves, Instead of the Environment: An Inquiry into Human Enhancement for Function and Beyond.Integr Psychol Behav Sci. 2024 Jun;58(2):589-637. doi: 10.1007/s12124-023-09797-6. Epub 2023 Aug 19. Integr Psychol Behav Sci. 2024. PMID: 37597122 Free PMC article.
-
BandFocusNet: A Lightweight Model for Motor Imagery Classification of a Supernumerary Thumb in Virtual Reality.IEEE Open J Eng Med Biol. 2025 Feb 3;6:305-311. doi: 10.1109/OJEMB.2025.3537760. eCollection 2025. IEEE Open J Eng Med Biol. 2025. PMID: 40034836 Free PMC article.
References
-
- Salvietti G, Hussain I, Cioncoloni D, Taddei S, Rossi S, Prattichizzo D. Compensating Hand Function in Chronic Stroke Patients Through the Robotic Sixth Finger. IEEE Trans Neural Syst Rehabil Eng. 2017;25:142–150. - PubMed
-
- Wu FY, Asada HH. ASME Dynamic Systems and Control Conference; San Antonio, TX. 2014.
-
- Sasaki T, Saraiji MY, Fernando CL, Minamizawa K, Inami M. paper presented at the ACM SIGGRAPH 2017 Emerging Technologies; 2017.
-
- Meraz NS, Sobajima M, Aoyama T, Hasegawa Y. Modification of body schema by use of extra robotic thumb. Robomech J. 2018;5
-
- Penaloza CI, Nishio S. BMI control of a third arm for multitasking. Science Robotics. 2018;3 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
