

Robotic hand augmentation drives changes in neural body representation
- PMID: 34043536
- PMCID: PMC7612043
- DOI: 10.1126/scirobotics.abd7935
Robotic hand augmentation drives changes in neural body representation
Abstract
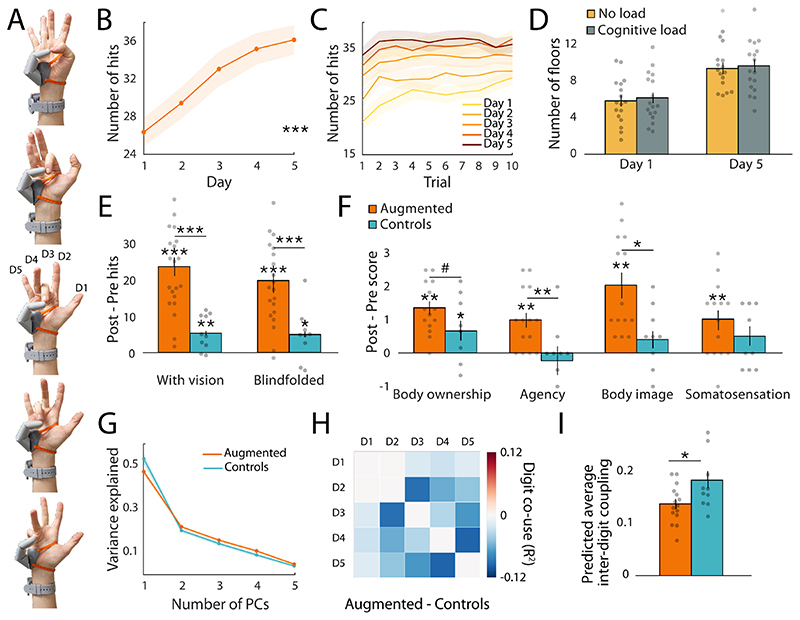
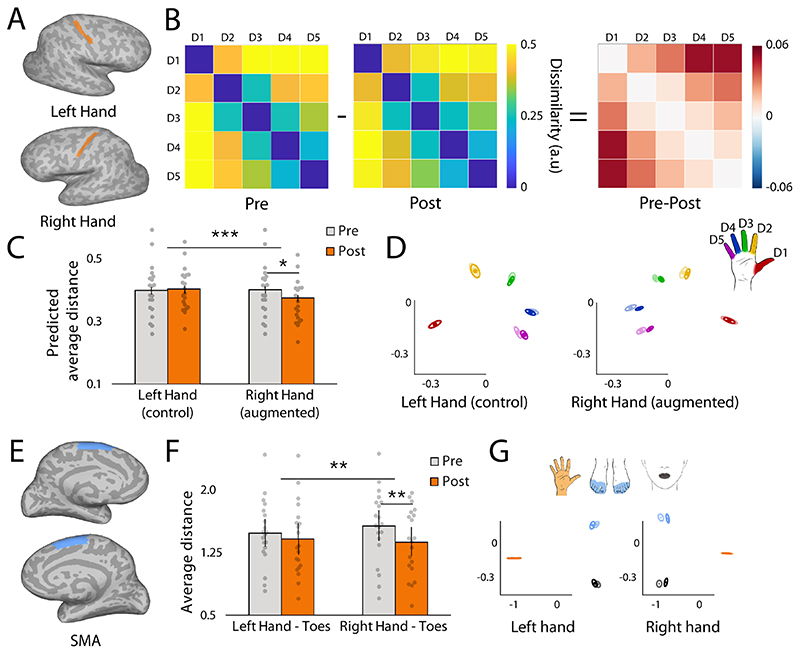
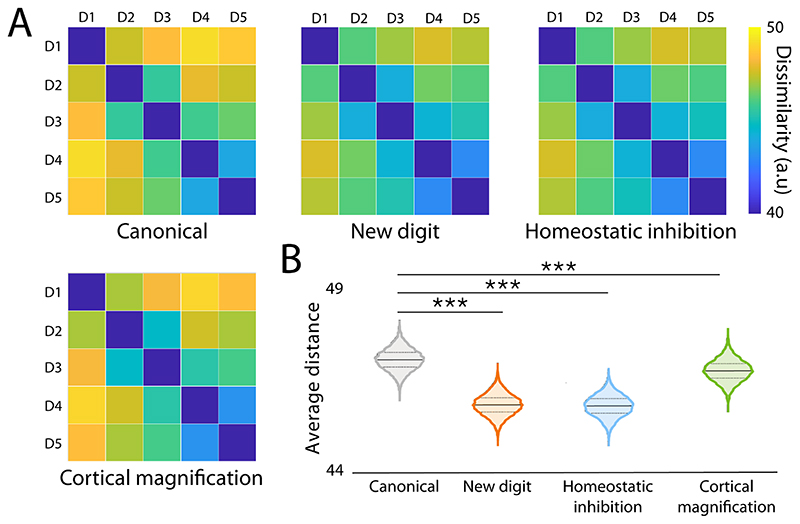
Humans have long been fascinated by the opportunities afforded through augmentation. This vision not only depends on technological innovations but also critically relies on our brain's ability to learn, adapt, and interface with augmentation devices. Here, we investigated whether successful motor augmentation with an extra robotic thumb can be achieved and what its implications are on the neural representation and function of the biological hand. Able-bodied participants were trained to use an extra robotic thumb (called the Third Thumb) over 5 days, including both lab-based and unstructured daily use. We challenged participants to complete normally bimanual tasks using only the augmented hand and examined their ability to develop hand-robot interactions. Participants were tested on a variety of behavioral and brain imaging tests, designed to interrogate the augmented hand's representation before and after the training. Training improved Third Thumb motor control, dexterity, and hand-robot coordination, even when cognitive load was increased or when vision was occluded. It also resulted in increased sense of embodiment over the Third Thumb. Consequently, augmentation influenced key aspects of hand representation and motor control. Third Thumb usage weakened natural kinematic synergies of the biological hand. Furthermore, brain decoding revealed a mild collapse of the augmented hand's motor representation after training, even while the Third Thumb was not worn. Together, our findings demonstrate that motor augmentation can be readily achieved, with potential for flexible use, reduced cognitive reliance, and increased sense of embodiment. Yet, augmentation may incur changes to the biological hand representation. Such neurocognitive consequences are crucial for successful implementation of future augmentation technologies.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Conflict of interest statement
Authors declare no competing interests.
Figures

References
-
- Salvietti G, Hussain I, Cioncoloni D, Taddei S, Rossi S, Prattichizzo D. Compensating Hand Function in Chronic Stroke Patients Through the Robotic Sixth Finger. IEEE Trans Neural Syst Rehabil Eng. 2017;25:142–150. - PubMed
-
- Wu FY, Asada HH. ASME Dynamic Systems and Control Conference; San Antonio, TX. 2014.
-
- Sasaki T, Saraiji MY, Fernando CL, Minamizawa K, Inami M. paper presented at the ACM SIGGRAPH 2017 Emerging Technologies; 2017.
-
- Meraz NS, Sobajima M, Aoyama T, Hasegawa Y. Modification of body schema by use of extra robotic thumb. Robomech J. 2018;5
-
- Penaloza CI, Nishio S. BMI control of a third arm for multitasking. Science Robotics. 2018;3 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
