

Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints
- PMID: 34050720
- PMCID: PMC8292915
- DOI: 10.1002/advs.202100916
Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints
Abstract
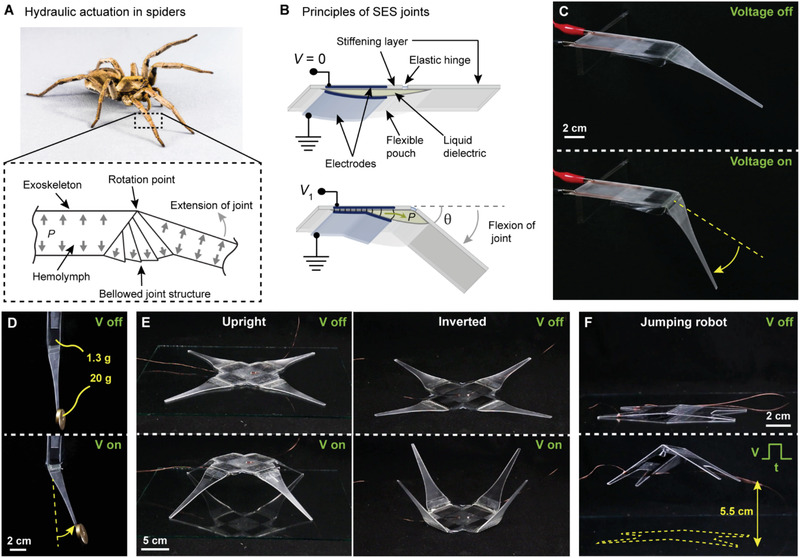
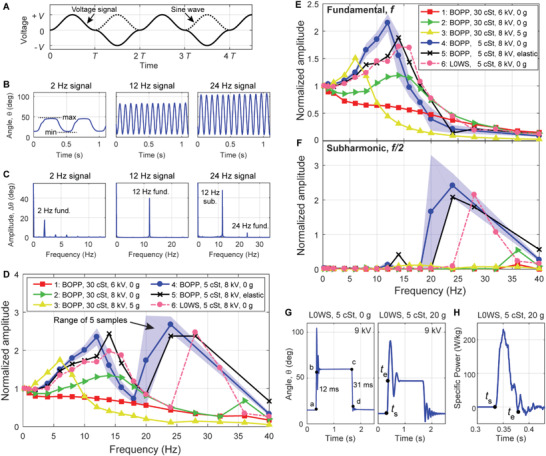
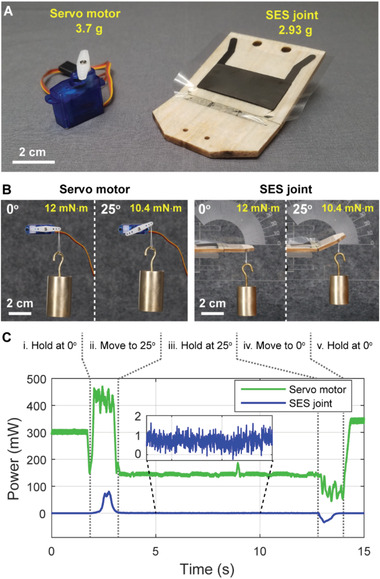
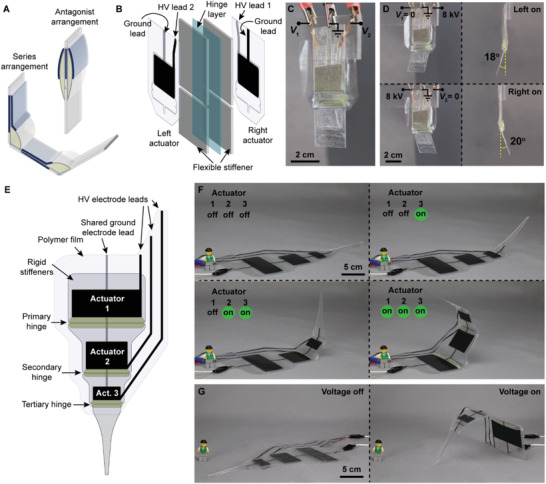
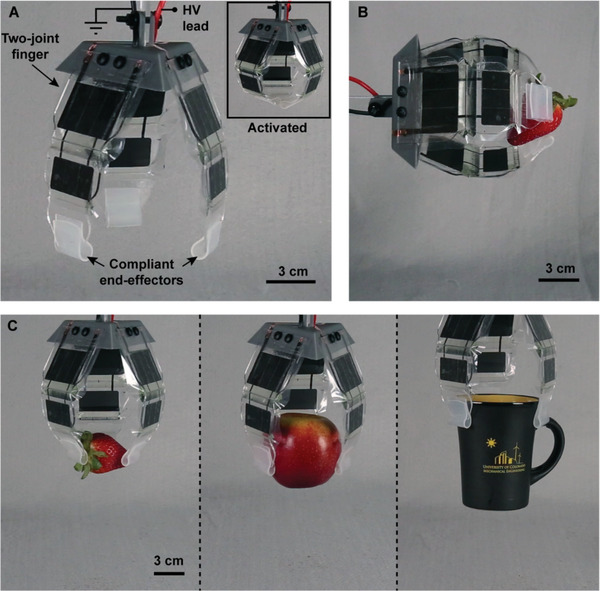
The impressive locomotion and manipulation capabilities of spiders have led to a host of bioinspired robotic designs aiming to reproduce their functionalities; however, current actuation mechanisms are deficient in either speed, force output, displacement, or efficiency. Here-using inspiration from the hydraulic mechanism used in spider legs-soft-actuated joints are developed that use electrostatic forces to locally pressurize a hydraulic fluid, and cause flexion of a segmented structure. The result is a lightweight, low-profile articulating mechanism capable of fast operation, high forces, and large displacement; these devices are termed spider-inspired electrohydraulic soft-actuated (SES) joints. SES joints with rotation angles up to 70°, blocked torques up to 70 mN m, and specific torques up to 21 N m kg-1 are demonstrated. SES joints demonstrate high speed operation, with measured roll-off frequencies up to 24 Hz and specific power as high as 230 W kg-1 -similar to human muscle. The versatility of these devices is illustrated by combining SES joints to create a bidirectional joint, an artificial limb with independently addressable joints, and a compliant gripper. The lightweight, low-profile design, and high performance of these devices, makes them well-suited toward the development of articulating robotic systems that can rapidly maneuver.
Keywords: HASEL; SES; actuator; articulation; bioinspired; electrohydraulic; soft.
© 2021 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Kumar K., Liu J., Christianson C., Ali M., Tolley M. T., Aizenberg J., Ingber D. E., Weaver J. C., Bertoldi K., Soft Rob. 2017, 4, 317. - PubMed
-
- Tolley M. T., Shepherd R. F., Mosadegh B., Galloway K. C., Wehner M., Karpelson M., Wood R. J., Whitesides G. M., Soft Rob. 2014, 1, 213.
-
- Suzumori K., Iikura S., Tanaka H., 1991 IEEE Int. Conf. on Robotics and Automation Proc., IEEE, Piscataway, NJ: 1991, Vol. 2, pp. 1622–1627.
-
- Polygerinos P., Wang Z., Galloway K. C., Wood R. J., Walsh C. J., Rob. Auton. Syst. 2015, 73, 135.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources