

Study of Mosquito Aerodynamics for Imitation as a Small Robot and Flight in a Low-Density Environment
- PMID: 34063196
- PMCID: PMC8147425
- DOI: 10.3390/mi12050511
Study of Mosquito Aerodynamics for Imitation as a Small Robot and Flight in a Low-Density Environment
Abstract
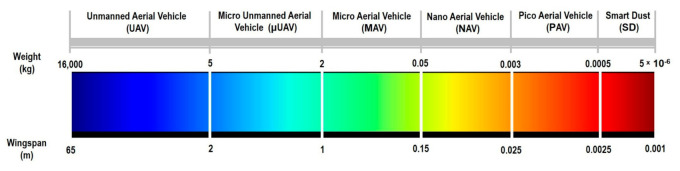
In terms of their flight and unusual aerodynamic characteristics, mosquitoes have become a new insect of interest. Despite transmitting the most significant infectious diseases globally, mosquitoes are still among the great flyers. Depending on their size, they typically beat at a high flapping frequency in the range of 600 to 800 Hz. Flapping also lets them conceal their presence, flirt, and help them remain aloft. Their long, slender wings navigate between the most anterior and posterior wing positions through a stroke amplitude about 40 to 45°, way different from their natural counterparts (>120°). Most insects use leading-edge vortex for lift, but mosquitoes have additional aerodynamic characteristics: rotational drag, wake capture reinforcement of the trailing-edge vortex, and added mass effect. A comprehensive look at the use of these three mechanisms needs to be undertaken-the pros and cons of high-frequency, low-stroke angles, operating far beyond the normal kinematic boundary compared to other insects, and the impact on the design improvements of miniature drones and for flight in low-density atmospheres such as Mars. This paper systematically reviews these unique unsteady aerodynamic characteristics of mosquito flight, responding to the potential questions from some of these discoveries as per the existing literature. This paper also reviews state-of-the-art insect-inspired robots that are close in design to mosquitoes. The findings suggest that mosquito-based small robots can be an excellent choice for flight in a low-density environment such as Mars.
Keywords: flapping frequency; low-density; rotational drag; stroke amplitude; wake capture; wing flexibility.
Conflict of interest statement
Authors declare no conflict of interest.
Figures










Similar articles
-
Dwarf Kingfisher-Inspired Bionic Flapping Wing and Its Aerodynamic Performance at Lowest Flight Speed.Biomimetics (Basel). 2022 Aug 29;7(3):123. doi: 10.3390/biomimetics7030123. Biomimetics (Basel). 2022. PMID: 36134928 Free PMC article.
-
Quasi-steady aerodynamic modeling and dynamic stability of mosquito-inspired flapping wing pico aerial vehicle.Front Robot AI. 2024 May 7;11:1362206. doi: 10.3389/frobt.2024.1362206. eCollection 2024. Front Robot AI. 2024. PMID: 38774469 Free PMC article.
-
Aerodynamic effects of flexibility in flapping wings.J R Soc Interface. 2010 Mar 6;7(44):485-97. doi: 10.1098/rsif.2009.0200. Epub 2009 Aug 19. J R Soc Interface. 2010. PMID: 19692394 Free PMC article.
-
Unsteady aerodynamics of insect flight.Symp Soc Exp Biol. 1995;49:109-29. Symp Soc Exp Biol. 1995. PMID: 8571220 Review.
-
Flapping wing aerodynamics: from insects to vertebrates.J Exp Biol. 2016 Apr;219(Pt 7):920-32. doi: 10.1242/jeb.042317. J Exp Biol. 2016. PMID: 27030773 Review.
Cited by
-
Dwarf Kingfisher-Inspired Bionic Flapping Wing and Its Aerodynamic Performance at Lowest Flight Speed.Biomimetics (Basel). 2022 Aug 29;7(3):123. doi: 10.3390/biomimetics7030123. Biomimetics (Basel). 2022. PMID: 36134928 Free PMC article.
-
Quasi-steady aerodynamic modeling and dynamic stability of mosquito-inspired flapping wing pico aerial vehicle.Front Robot AI. 2024 May 7;11:1362206. doi: 10.3389/frobt.2024.1362206. eCollection 2024. Front Robot AI. 2024. PMID: 38774469 Free PMC article.
-
Computational Fluid Dynamics Analysis in Biomimetics Applications: A Review from Aerospace Engineering Perspective.Biomimetics (Basel). 2023 Jul 20;8(3):319. doi: 10.3390/biomimetics8030319. Biomimetics (Basel). 2023. PMID: 37504207 Free PMC article. Review.
-
Adaptive control strategies for button motor actuated insect scale flapping wing MAV mechanisms.Sci Rep. 2025 Aug 5;15(1):28626. doi: 10.1038/s41598-025-13834-2. Sci Rep. 2025. PMID: 40764637 Free PMC article.
References
-
- Hassanalian M., Abdelkefi A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017;91:99–131. doi: 10.1016/j.paerosci.2017.04.003. - DOI
-
- Zhang J.D., Huang W.X. On the role of vortical structures in aerodynamic performance of a hovering mosquito. Phys. Fluids. 2019;31:051906. doi: 10.1063/1.5090878. - DOI
-
- Liu L.G., Du G., Sun M. Aerodynamic-force production mechanisms in hovering mosquitoes. J. Fluid Mech. 2020:898. doi: 10.1017/jfm.2020.386. - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
