

New Sensor Device to Accurately Measure Cable Tension in Cable-Driven Parallel Robots
- PMID: 34064277
- PMCID: PMC8196903
- DOI: 10.3390/s21113604
New Sensor Device to Accurately Measure Cable Tension in Cable-Driven Parallel Robots
Abstract
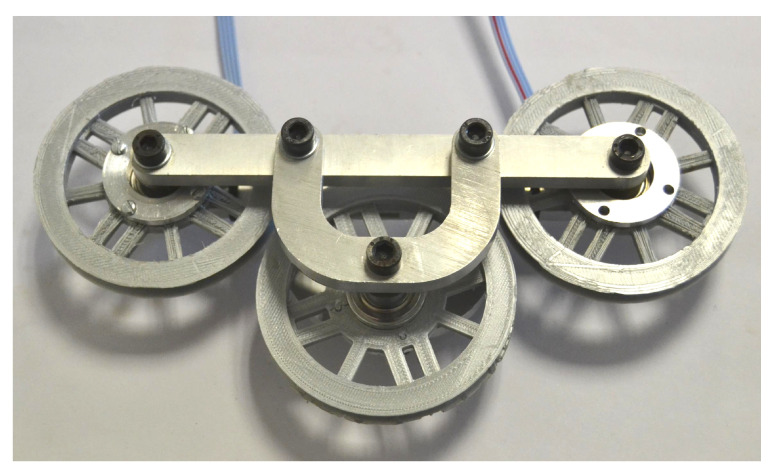
Cable-driven parallel robots are a special type of robot in which an end-effector is attached to a fixed frame by means of several cables. The position and orientation of the end-effector can be controlled by controlling the length of the cables. These robots present a wide range of advantages, and the control algorithms required have greater complexity than those in traditional serial robots. Measuring the cable tension is an important task in this type of robot as many control algorithms rely on this information. There are several well-known approaches to measure cable tension in cable robots, where a trade-off between complexity and accuracy is observed. This work presents a new device based on strain gauges to measure cable tension specially designed to be applied in cable-driven parallel robots. This device can be easily mounted on the cable near the fixed frame, allowing the cable length and orientation to change freely, while the measure is taken before the cable passes through the guiding pulleys for improved accuracy. The results obtained from the device show a strong repeatability and linearity of the measures.
Keywords: cable-driven parallel robots; strain gauges; tension measurement.
Conflict of interest statement
The authors declare no conflict of interest.
Figures








References
-
- Pott A. Cable-Driven Parallel Robots: Theory and Application. Springer International Publishing; Cham, Switzerland: 2018. Introduction; pp. 1–13.
-
- Khosravi M.A., Taghirad H.D. Robust PID control of cable-driven robots with elastic cables; Proceedings of the 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM); Tehran, Iran. 13–15 February 2013; pp. 331–336.
-
- Tadokoro S., Murao Y., Hiller M., Murata R., Kohkawa H., Matsushima T. A motion base with 6-DOF by parallel cable drive architecture. IEEE/ASME Trans. Mechatron. 2002;7:115–123. doi: 10.1109/TMECH.2002.1011248. - DOI
-
- Zi B., Duan B., Du J., Bao H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics. 2008;18:1–12. doi: 10.1016/j.mechatronics.2007.09.004. - DOI
-
- Wang T., Tong S., Yi J., Li H. Adaptive inverse control of cable-driven parallel system based on type-2 fuzzy logic systems. IEEE Trans. Fuzzy Syst. 2014;23:1803–1816. doi: 10.1109/TFUZZ.2014.2379284. - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous
