

EMG and Joint Angle-Based Machine Learning to Predict Future Joint Angles at the Knee
- PMID: 34067477
- PMCID: PMC8197024
- DOI: 10.3390/s21113622
EMG and Joint Angle-Based Machine Learning to Predict Future Joint Angles at the Knee
Abstract
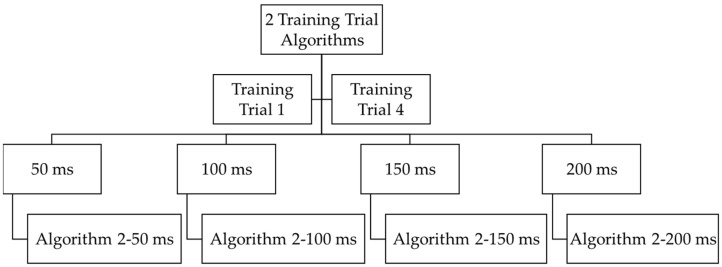
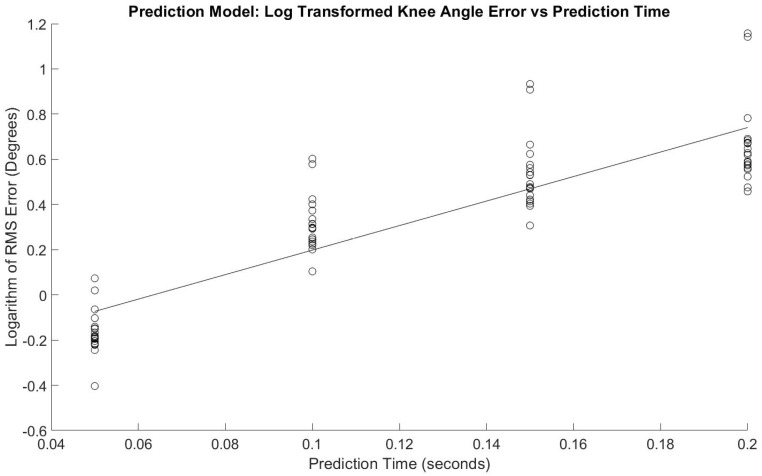
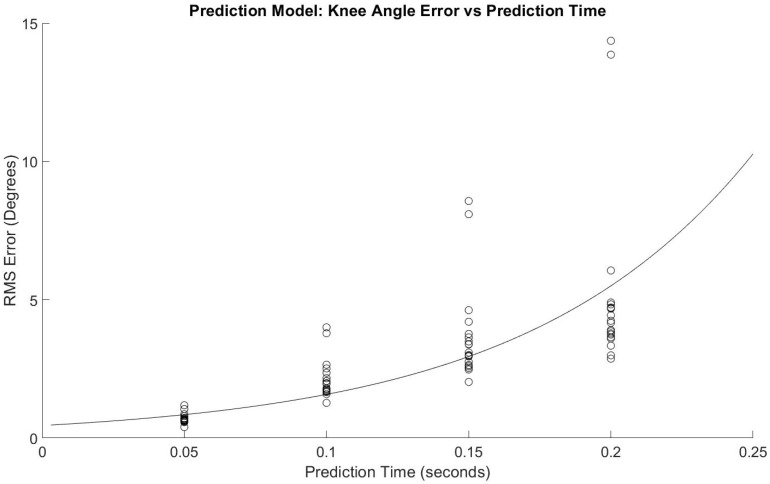
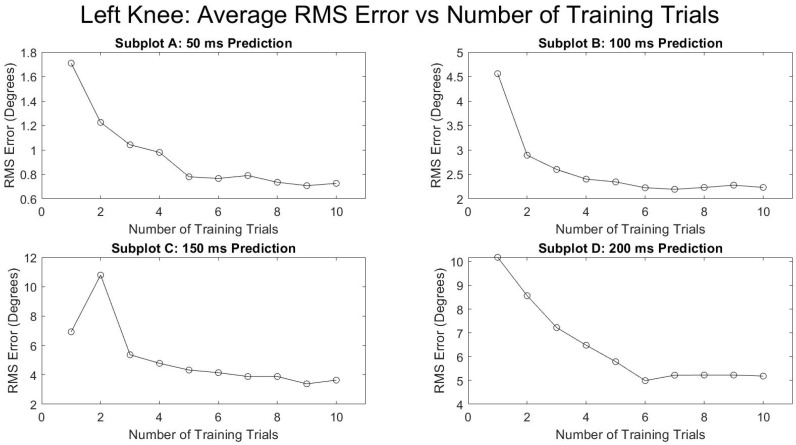
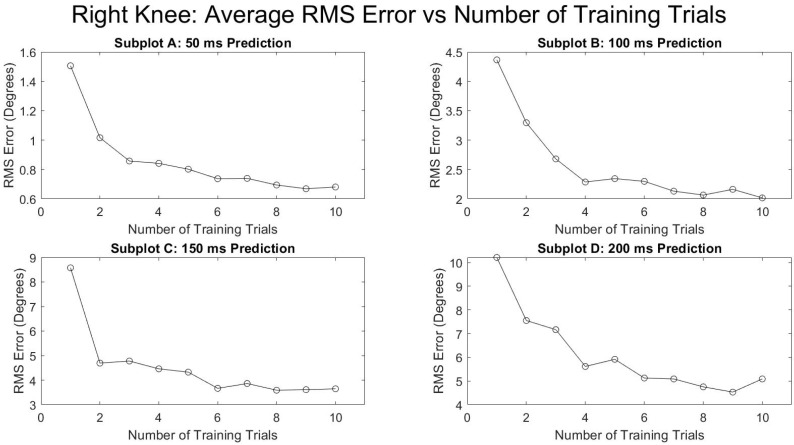
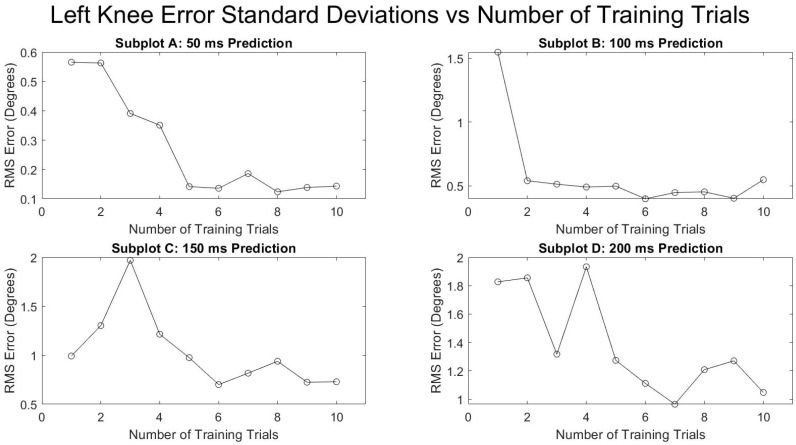
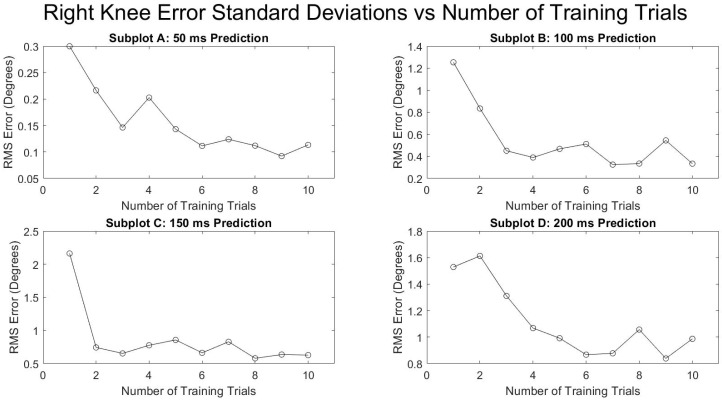
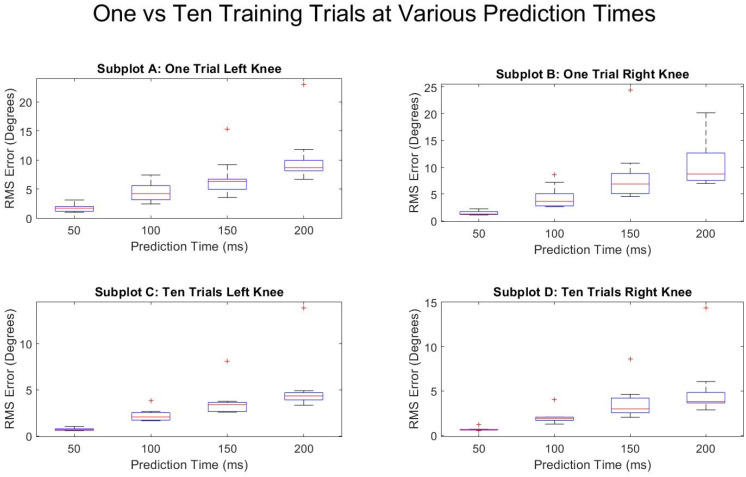
Electromyography (EMG) is commonly used to measure electrical activity of the skeletal muscles. As exoskeleton technology advances, these signals may be used to predict human intent for control purposes. This study used an artificial neural network trained and tested with knee flexion angles and knee muscle EMG signals to predict knee flexion angles during gait at 50, 100, 150, and 200 ms into the future. The hypothesis of this study was that the algorithm's prediction accuracy would only be affected by time into the future, not subject, gender or side, and that as time into the future increased, the prediction accuracy would decrease. A secondary hypothesis was that as the number of algorithm training trials increased, the prediction accuracy of the artificial neural network (ANN) would increase. The results of this study indicate that only time into the future affected the accuracy of knee flexion angle prediction (p < 0.001), whereby greater time resulted in reduced accuracy (0.68 to 4.62 degrees root mean square error (RMSE) from 50 to 200 ms). Additionally, increased number of training trials resulted in increased angle prediction accuracy.
Keywords: EMG; joint angle; machine learning; prediction.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Dollar A.M., Herr H. Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. IEEE Trans. Robot. 2008;24:144–158. doi: 10.1109/TRO.2008.915453. - DOI
-
- Gopura R.A.R.C., Bandara D.S.V., Kiguchi K., Mann G.K.I. Developments in Hardware Systems of Active Upper-Limb Exoskeleton Robots: A Review. Robot. Auton. Syst. 2016;75:203–220. doi: 10.1016/j.robot.2015.10.001. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
