

Toward Mechanochromic Soft Material-Based Visual Feedback for Electronics-Free Surgical Effectors
- PMID: 34075732
- PMCID: PMC8336492
- DOI: 10.1002/advs.202100418
Toward Mechanochromic Soft Material-Based Visual Feedback for Electronics-Free Surgical Effectors
Abstract
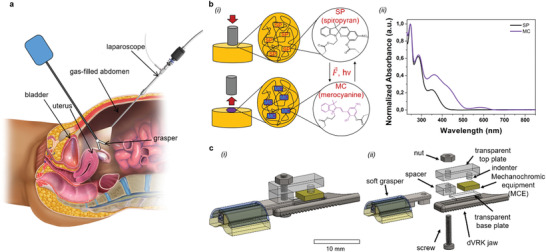
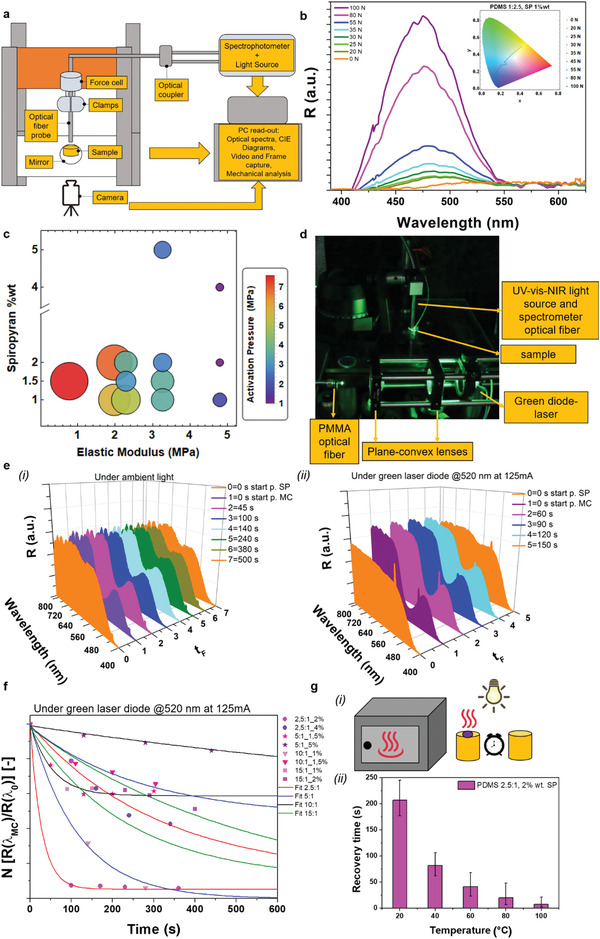
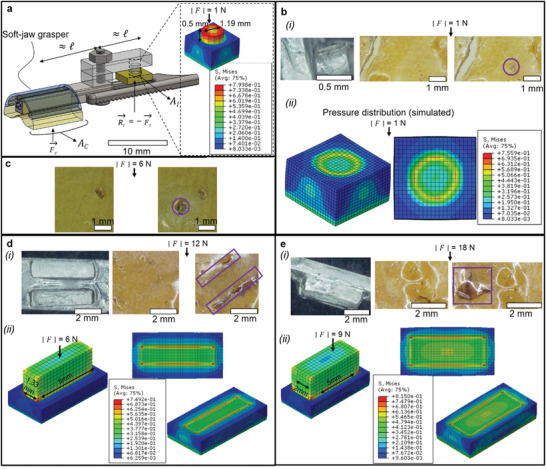
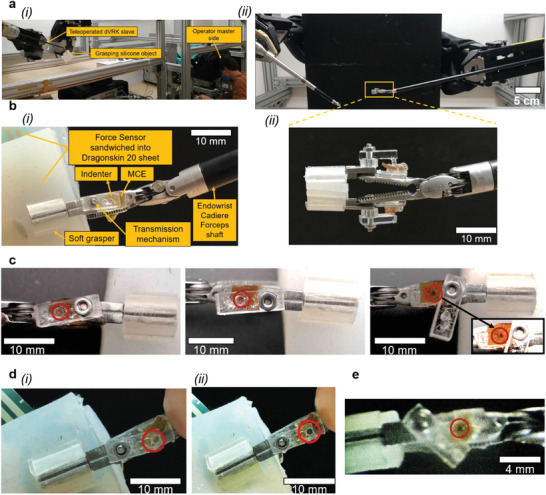
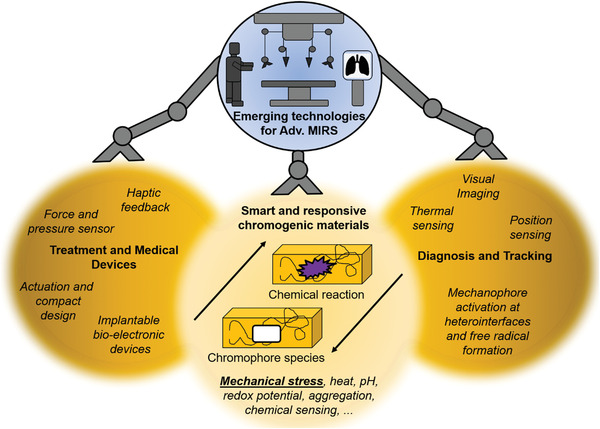
A chromogenically reversible, mechanochromic pressure sensor is integrated into a mininvasive surgical grasper compatible with the da Vinci robotic surgical system. The sensorized effector, also featuring two soft-material jaws, encompasses a mechanochromic polymeric inset doped with functionalized spiropyran (SP) molecule, designed to activate mechanochromism at a chosen pressure and providing a reversible color change. Considering such tools are systematically in the visual field of the operator during surgery, color change of the mechanochromic effector can help avoid tissue damage. No electronics is required to control the devised visual feedback. SP-doping of polydimethylsiloxane (2.5:1 prepolymer/curing agent weight ratio) permits to modulate the mechanochromic activation pressure, with lower values around 1.17 MPa for a 2% wt. SP concentration, leading to a shorter chromogenic recovery time of 150 s at room temperature (25 °C) under green light illumination. Nearly three-times shorter recovery time is observed at body temperature (37 °C). To the best of knowledge, this study provides the first demonstration of mechanochromic materials in surgery, in particular to sensorize unpowered surgical effectors, by avoiding dramatic increases in tool complexity due to additional electronics, thus fostering their application. The proposed sensing strategy can be extended to further tools and scopes.
Keywords: biomedical; mechanochromic grasper; mechanochromism; minimally invasive surgery; spiropyran; surgical grasper; visual feedback.
© 2021 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Mechanochromic Stretchable Electronics.ACS Appl Mater Interfaces. 2018 Sep 5;10(35):29918-29924. doi: 10.1021/acsami.8b09130. Epub 2018 Aug 23. ACS Appl Mater Interfaces. 2018. PMID: 30091895
-
Visual-perceptual mismatch in robotic surgery.Surg Endosc. 2017 Aug;31(8):3271-3278. doi: 10.1007/s00464-016-5358-z. Epub 2016 Dec 6. Surg Endosc. 2017. PMID: 27924387 Free PMC article.
-
Artificial palpation in robotic surgery using haptic feedback.Surg Endosc. 2019 Apr;33(4):1252-1259. doi: 10.1007/s00464-018-6405-8. Epub 2018 Sep 5. Surg Endosc. 2019. PMID: 30187198 Free PMC article.
-
Substituent Effects Control Spiropyran-Merocyanine Equilibria and Mechanochromic Utility.Macromol Rapid Commun. 2021 Jan;42(1):e2000597. doi: 10.1002/marc.202000597. Epub 2020 Dec 3. Macromol Rapid Commun. 2021. PMID: 33270317 Review.
-
A Review of Recent Advancements in Sensor-Integrated Medical Tools.Adv Sci (Weinh). 2024 May;11(20):e2307427. doi: 10.1002/advs.202307427. Epub 2024 Mar 9. Adv Sci (Weinh). 2024. PMID: 38460177 Free PMC article. Review.
Cited by
-
A multimodal virtual vision platform as a next-generation vision system for a surgical robot.Med Biol Eng Comput. 2024 May;62(5):1535-1548. doi: 10.1007/s11517-024-03030-1. Epub 2024 Feb 2. Med Biol Eng Comput. 2024. PMID: 38305815 Free PMC article.
-
Soft robotics towards sustainable development goals and climate actions.Front Robot AI. 2023 Mar 17;10:1116005. doi: 10.3389/frobt.2023.1116005. eCollection 2023. Front Robot AI. 2023. PMID: 37008983 Free PMC article.
-
Multi-axis robotic forceps with decoupled pneumatic actuation and force sensing for cochlear implantation.Nat Commun. 2025 Feb 14;16(1):1648. doi: 10.1038/s41467-025-56958-9. Nat Commun. 2025. PMID: 39952944 Free PMC article.
References
-
- Enayati N., De Momi E., Ferrigno G., IEEE Rev. Biomed. Eng. 2016, 9, 49. - PubMed
-
- Zarrin P. S., Escoto A., Xu R., Patel R. V., Naish M. D., Trejos A. L., IEEE Sens. J. 2018, 18, 2816.
-
- Johnson K. O., Curr. Opin. Neurobiol. 2001, 11, 455. - PubMed
-
- Suzuki H., Wood R. J., Nat. Mach. Intell. 2020, 2, 437.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources