

Using a simple rope-pulley system that mechanically couples the arms, legs, and treadmill reduces the metabolic cost of walking
- PMID: 34098979
- PMCID: PMC8186224
- DOI: 10.1186/s12984-021-00887-3
Using a simple rope-pulley system that mechanically couples the arms, legs, and treadmill reduces the metabolic cost of walking
Abstract
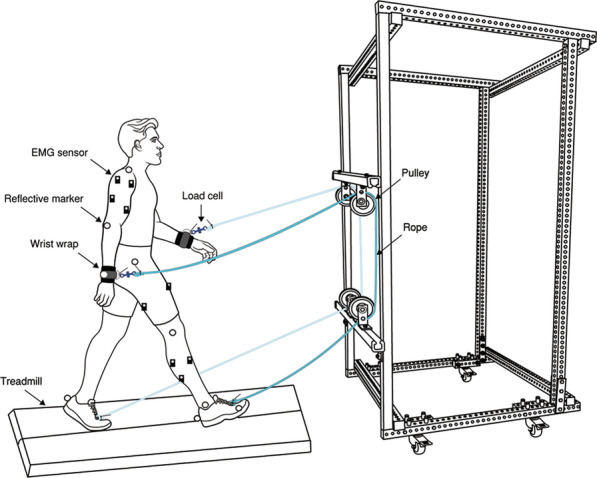
Background: Emphasizing the active use of the arms and coordinating them with the stepping motion of the legs may promote walking recovery in patients with impaired lower limb function. Yet, most approaches use seated devices to allow coupled arm and leg movements. To provide an option during treadmill walking, we designed a rope-pulley system that physically links the arms and legs. This arm-leg pulley system was grounded to the floor and made of commercially available slotted square tubing, solid strut channels, and low-friction pulleys that allowed us to use a rope to connect the subject's wrist to the ipsilateral foot. This set-up was based on our idea that during walking the arm could generate an assistive force during arm swing retraction and, therefore, aid in leg swing.
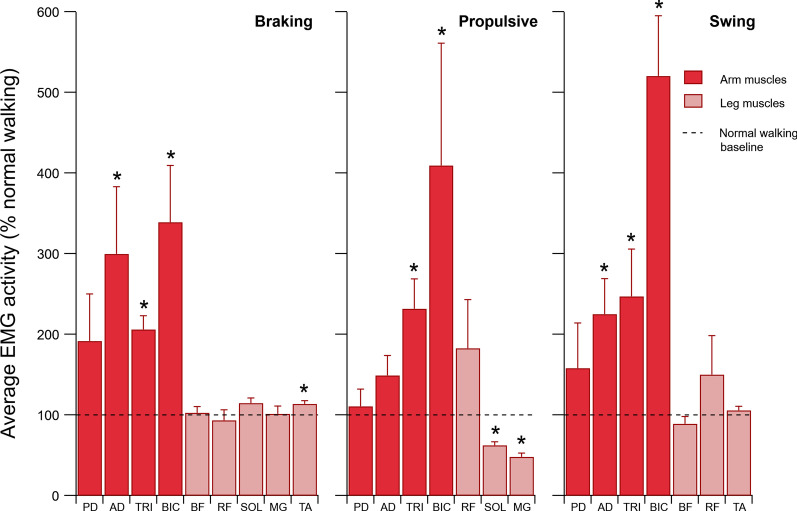
Methods: To test this idea, we compared the mechanical, muscular, and metabolic effects between normal walking and walking with the arm-leg pulley system. We measured rope and ground reaction forces, electromyographic signals of key arm and leg muscles, and rates of metabolic energy consumption while healthy, young subjects walked at 1.25 m/s on a dual-belt instrumented treadmill (n = 8).
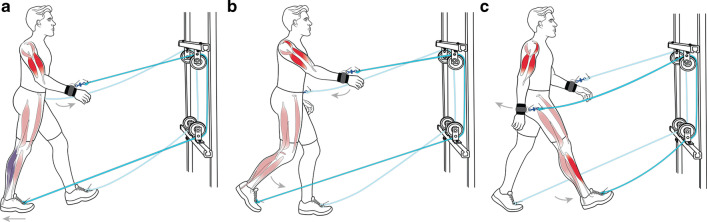
Results: With our arm-leg pulley system, we found that an assistive force could be generated, reaching peak values of 7% body weight on average. Contrary to our expectation, the force mainly coincided with the propulsive phase of walking and not leg swing. Our findings suggest that subjects actively used their arms to harness the energy from the moving treadmill belt, which helped to propel the whole body via the arm-leg rope linkage. This effectively decreased the muscular and mechanical demands placed on the legs, reducing the propulsive impulse by 43% (p < 0.001), which led to a 17% net reduction in the metabolic power required for walking (p = 0.001).
Conclusions: These findings provide the biomechanical and energetic basis for how we might reimagine the use of the arms in gait rehabilitation, opening the opportunity to explore if such a method could help patients regain their walking ability.
Trial registration: Study registered on 09/29/2018 in ClinicalTrials.gov (ID-NCT03689647).
Keywords: Arms; Assistive device; Coordination; Energetics; Gait rehabilitation; Legs; Locomotion biomechanics; Walking.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures


Similar articles
-
Step-to-step variability indicates disruption to balance control when linking the arms and legs during treadmill walking.PLoS One. 2022 Mar 23;17(3):e0265750. doi: 10.1371/journal.pone.0265750. eCollection 2022. PLoS One. 2022. PMID: 35320305 Free PMC article.
-
Exploring How the Arms Can Help the Legs in Facilitating Gait Rehabilitation.Adv Biol (Weinh). 2024 Jun;8(6):e2300661. doi: 10.1002/adbi.202300661. Epub 2024 Mar 22. Adv Biol (Weinh). 2024. PMID: 38519429 Review.
-
A low-cost method for carrying loads during human walking.J Exp Biol. 2020 Dec 4;223(Pt 23):jeb216119. doi: 10.1242/jeb.216119. J Exp Biol. 2020. PMID: 33106297
-
Energy cost and muscular activity required for leg swing during walking.J Appl Physiol (1985). 2005 Jul;99(1):23-30. doi: 10.1152/japplphysiol.01190.2004. J Appl Physiol (1985). 2005. PMID: 16036902 Clinical Trial.
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
Cited by
-
Step-to-step variability indicates disruption to balance control when linking the arms and legs during treadmill walking.PLoS One. 2022 Mar 23;17(3):e0265750. doi: 10.1371/journal.pone.0265750. eCollection 2022. PLoS One. 2022. PMID: 35320305 Free PMC article.
-
Metabolically efficient walking assistance using optimized timed forces at the waist.Sci Robot. 2022 Mar 16;7(64):eabh1925. doi: 10.1126/scirobotics.abh1925. Epub 2022 Mar 16. Sci Robot. 2022. PMID: 35294219 Free PMC article.
References
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
Medical
