

Minding the gap: learning and visual scanning behaviour in nocturnal bull ants
- PMID: 34142708
- PMCID: PMC8325935
- DOI: 10.1242/jeb.242245
Minding the gap: learning and visual scanning behaviour in nocturnal bull ants
Abstract
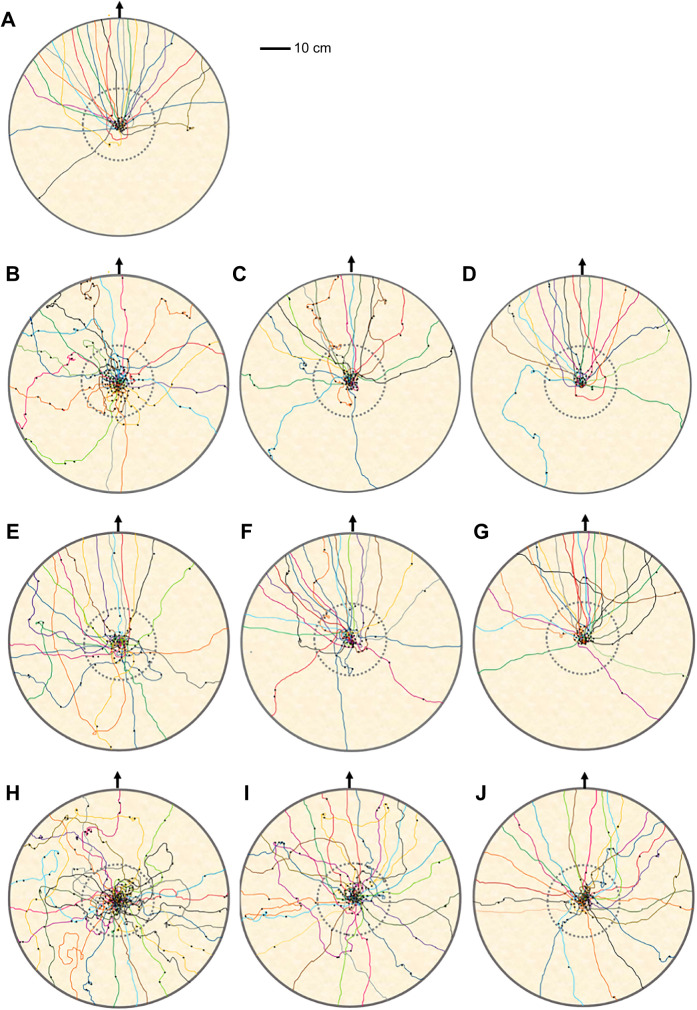
Insects possess small brains but exhibit sophisticated behaviour, specifically their ability to learn to navigate within complex environments. To understand how they learn to navigate in a cluttered environment, we focused on learning and visual scanning behaviour in the Australian nocturnal bull ant, Myrmecia midas, which are exceptional visual navigators. We tested how individual ants learn to detour via a gap and how they cope with substantial spatial changes over trips. Homing M. midas ants encountered a barrier on their foraging route and had to find a 50 cm gap between symmetrical large black screens, at 1 m distance towards the nest direction from the centre of the releasing platform in both familiar (on-route) and semi-familiar (off-route) environments. Foragers were tested for up to 3 learning trips with the changed conditions in both environments. The results showed that on the familiar route, individual foragers learned the gap quickly compared with when they were tested in the semi-familiar environment. When the route was less familiar, and the panorama was changed, foragers were less successful at finding the gap and performed more scans on their way home. Scene familiarity thus played a significant role in visual scanning behaviour. In both on-route and off-route environments, panoramic changes significantly affected learning, initial orientation and scanning behaviour. Nevertheless, over a few trips, success at gap finding increased, visual scans were reduced, the paths became straighter, and individuals took less time to reach the goal.
Keywords: Gap learning; Scene familiarity; Success rate; Visual navigation.
© 2021. Published by The Company of Biologists Ltd.
Conflict of interest statement
Competing interests The authors declare no competing or financial interests.
Figures








Similar articles
-
What view information is most important in the homeward navigation of an Australian bull ant, Myrmecia midas?J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022 Nov;208(5-6):545-559. doi: 10.1007/s00359-022-01565-y. Epub 2022 Sep 1. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022. PMID: 36048246 Free PMC article.
-
Effect of large visual changes on the navigation of the nocturnal bull ant, Myrmecia midas.Anim Cogn. 2020 Nov;23(6):1071-1080. doi: 10.1007/s10071-020-01377-0. Epub 2020 Apr 8. Anim Cogn. 2020. PMID: 32270349
-
Detouring while foraging up a tree: What bull ants (Myrmecia midas) learn and their reactions to novel sensory cues.J Comp Psychol. 2023 Feb;137(1):4-15. doi: 10.1037/com0000333. J Comp Psychol. 2023. PMID: 36931833
-
Experimental ethology of learning in desert ants: Becoming expert navigators.Behav Processes. 2019 Jan;158:181-191. doi: 10.1016/j.beproc.2018.12.001. Epub 2018 Dec 5. Behav Processes. 2019. PMID: 30529645 Review.
-
The neuroethology of ant navigation.Curr Biol. 2025 Feb 3;35(3):R110-R124. doi: 10.1016/j.cub.2024.12.034. Curr Biol. 2025. PMID: 39904309 Review.
Cited by
-
Phobic responses of bull ants (Myrmecia midas) to odours introduced on their foraging route.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2025 Jul 11. doi: 10.1007/s00359-025-01750-9. Online ahead of print. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2025. PMID: 40646347
-
Visual navigation: properties, acquisition and use of views.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2023 Jul;209(4):499-514. doi: 10.1007/s00359-022-01599-2. Epub 2022 Dec 14. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2023. PMID: 36515743 Review.
-
What view information is most important in the homeward navigation of an Australian bull ant, Myrmecia midas?J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022 Nov;208(5-6):545-559. doi: 10.1007/s00359-022-01565-y. Epub 2022 Sep 1. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022. PMID: 36048246 Free PMC article.
-
Desert Ant (Melophorus bagoti) Dumpers Learn from Experience to Improve Waste Disposal and Show Spatial Fidelity.Insects. 2024 Oct 16;15(10):814. doi: 10.3390/insects15100814. Insects. 2024. PMID: 39452390 Free PMC article.
-
Nest excavators' learning walks in the Australian desert ant Melophorus bagoti.Anim Cogn. 2024 May 24;27(1):39. doi: 10.1007/s10071-024-01877-3. Anim Cogn. 2024. PMID: 38789697 Free PMC article.
References
-
- Batschelet, E. (1981). Circular Statistics in Biology. Academic Press.
-
- Bond, A. B., Kamil, A. C. and Balda, R. P. (2007). Serial reversal learning and the evolution of behavioral flexibility in three species of North American corvids (Gymnorhinus cyanocephalus, Nucifraga columbiana, Aphelocoma californica). J. Comp. Psychol. 121, 372-379. 10.1037/0735-7036.121.4.372 - DOI - PubMed
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
Miscellaneous
