

Robotics Dexterous Grasping: The Methods Based on Point Cloud and Deep Learning
- PMID: 34177509
- PMCID: PMC8221534
- DOI: 10.3389/fnbot.2021.658280
Robotics Dexterous Grasping: The Methods Based on Point Cloud and Deep Learning
Abstract
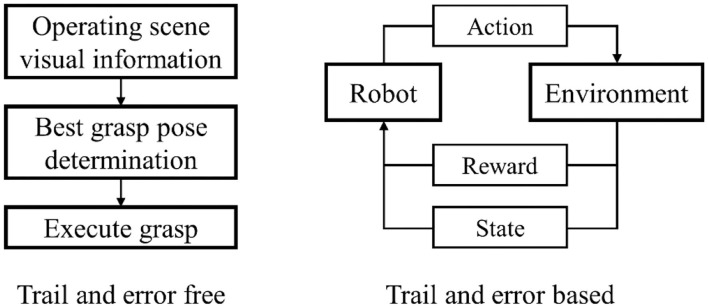
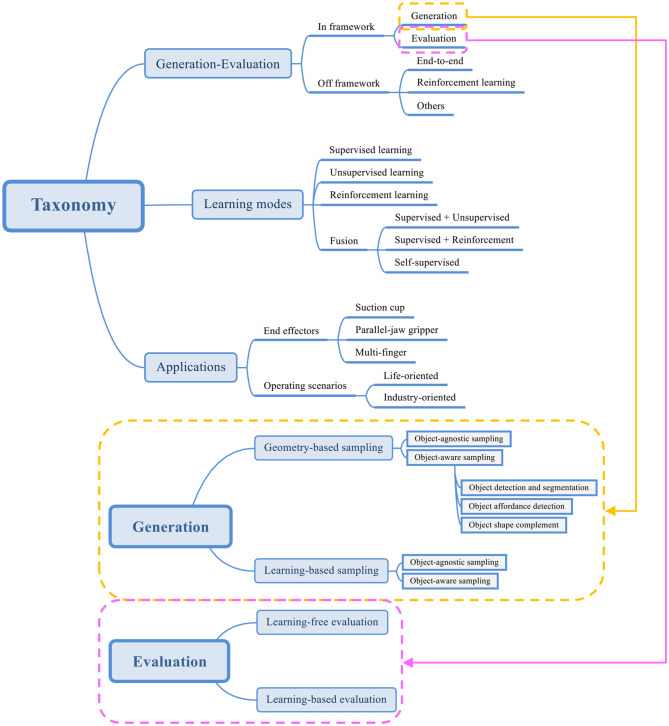
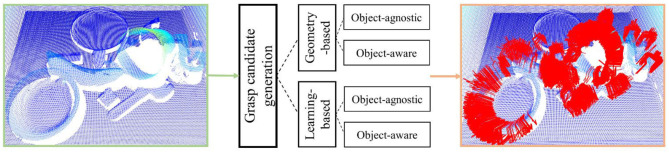
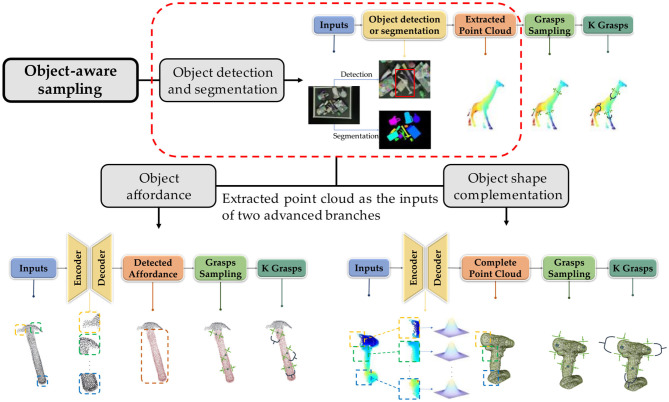
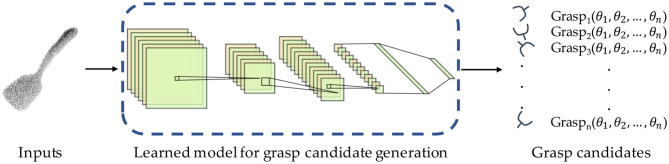
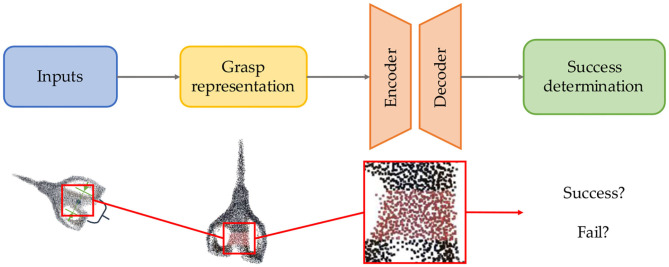
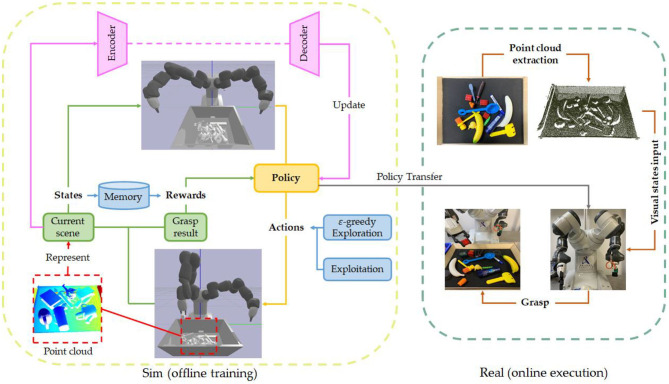
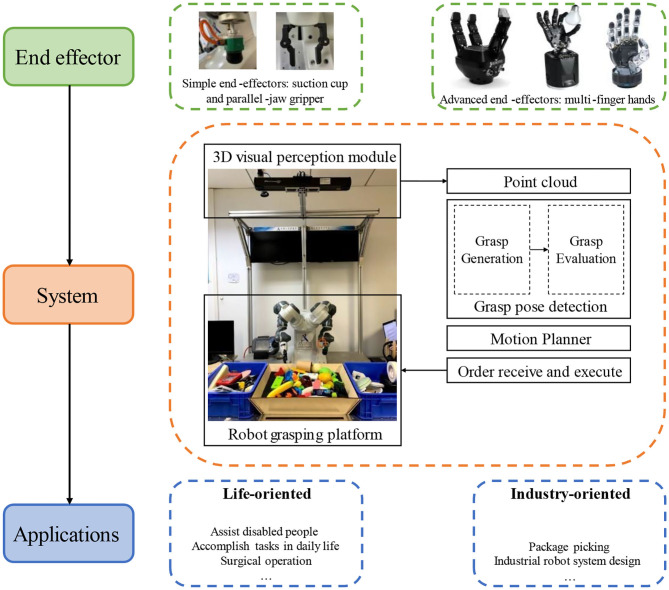
Dexterous manipulation, especially dexterous grasping, is a primitive and crucial ability of robots that allows the implementation of performing human-like behaviors. Deploying the ability on robots enables them to assist and substitute human to accomplish more complex tasks in daily life and industrial production. A comprehensive review of the methods based on point cloud and deep learning for robotics dexterous grasping from three perspectives is given in this paper. As a new category schemes of the mainstream methods, the proposed generation-evaluation framework is the core concept of the classification. The other two classifications based on learning modes and applications are also briefly described afterwards. This review aims to afford a guideline for robotics dexterous grasping researchers and developers.
Keywords: deep learning; dexterous grasping; point cloud; review; robotics.
Copyright © 2021 Duan, Wang, Huang, Xu, Wei and Shen.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
An Accessible, Open-Source Dexterity Test: Evaluating the Grasping and Dexterous Manipulation Capabilities of Humans and Robots.Front Robot AI. 2022 Apr 25;9:808154. doi: 10.3389/frobt.2022.808154. eCollection 2022. Front Robot AI. 2022. PMID: 35546901 Free PMC article.
-
Research on Intelligent Robot Point Cloud Grasping in Internet of Things.Micromachines (Basel). 2022 Nov 17;13(11):1999. doi: 10.3390/mi13111999. Micromachines (Basel). 2022. PMID: 36422429 Free PMC article.
-
Review of Learning-Based Robotic Manipulation in Cluttered Environments.Sensors (Basel). 2022 Oct 18;22(20):7938. doi: 10.3390/s22207938. Sensors (Basel). 2022. PMID: 36298284 Free PMC article. Review.
-
The JamHand: Dexterous Manipulation with Minimal Actuation.Soft Robot. 2017 Mar;4(1):70-80. doi: 10.1089/soro.2016.0037. Epub 2017 Jan 25. Soft Robot. 2017. PMID: 29182098
-
Learning-based control approaches for service robots on cloth manipulation and dressing assistance: a comprehensive review.J Neuroeng Rehabil. 2022 Nov 3;19(1):117. doi: 10.1186/s12984-022-01078-4. J Neuroeng Rehabil. 2022. PMID: 36329473 Free PMC article. Review.
Cited by
-
Emerging trends and research foci of deep learning in spine: bibliometric and visualization study.Neurosurg Rev. 2023 Mar 31;46(1):81. doi: 10.1007/s10143-023-01987-5. Neurosurg Rev. 2023. PMID: 37000304 Review.
-
Dexterous Manipulation for Multi-Fingered Robotic Hands With Reinforcement Learning: A Review.Front Neurorobot. 2022 Apr 25;16:861825. doi: 10.3389/fnbot.2022.861825. eCollection 2022. Front Neurorobot. 2022. PMID: 35548780 Free PMC article. Review.
-
1D Barcode Detection: Novel Benchmark Datasets and Comprehensive Comparison of Deep Convolutional Neural Network Approaches.Sensors (Basel). 2022 Nov 14;22(22):8788. doi: 10.3390/s22228788. Sensors (Basel). 2022. PMID: 36433385 Free PMC article.
-
Learning Playing Piano with Bionic-Constrained Diffusion Policy for Anthropomorphic Hand.Cyborg Bionic Syst. 2024 May 17;5:0104. doi: 10.34133/cbsystems.0104. eCollection 2024. Cyborg Bionic Syst. 2024. PMID: 38765638 Free PMC article.
References
-
- Aldoma A., Marton Z.-C., Tombari F., Wohlkinger W., Potthast C., Zeisl B., et al. . (2012). Tutorial: Point cloud library: Three-dimensional object recognition and 6 dof pose estimation. IEEE Robot. Autom. Magaz. 19, 80–91. 10.1109/MRA.2012.2206675 - DOI
-
- Ammanabrolu P., Riedl M. O. (2019). Transfer in deep reinforcement learning using knowledge graphs. arXiv [Preprint]. arXiv:1908.06556. 10.18653/v1/D19-5301 - DOI
-
- Antonova R., Kokic M., Stork J. A., Kragic D. (2018). Global search with bernoulli alternation kernel for task-oriented grasping informed by simulation. arXiv [Preprint]. arXiv:1810.04438.
-
- Ardón P., Pairet È., Petrick R. P., Ramamoorthy S., Lohan K. S. (2019). Learning grasp affordance reasoning through semantic relations. IEEE Robot. Autom. Lett. 4, 4571–4578. 10.1109/LRA.2019.2933815 - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials