

Toward Application of Liquid Crystalline Elastomer for Smart Robotics: State of the Art and Challenges
- PMID: 34204168
- PMCID: PMC8201031
- DOI: 10.3390/polym13111889
Toward Application of Liquid Crystalline Elastomer for Smart Robotics: State of the Art and Challenges
Abstract
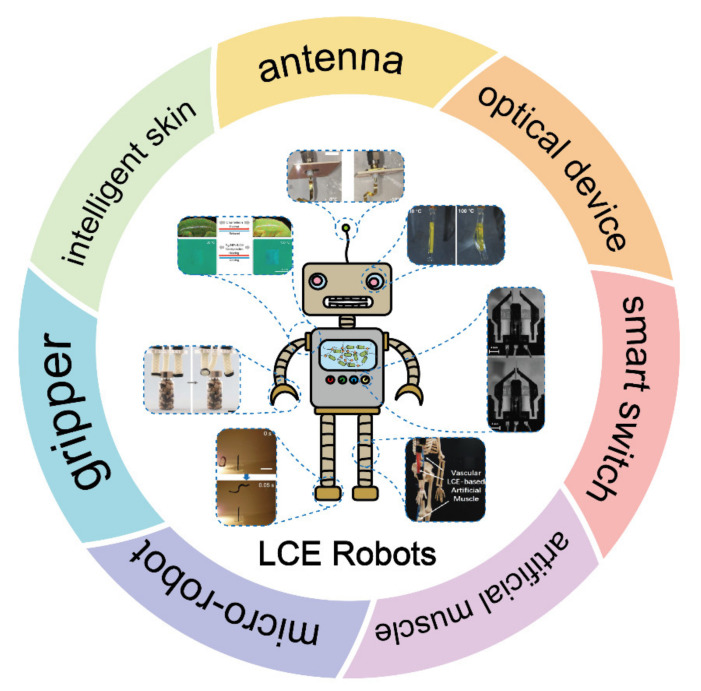
Liquid crystalline elastomers (LCEs) are lightly crosslinked polymers that combine liquid crystalline order and rubber elasticity. Owing to their unique anisotropic behavior and reversible shape responses to external stimulation (temperature, light, etc.), LCEs have emerged as preferred candidates for actuators, artificial muscles, sensors, smart robots, or other intelligent devices. Herein, we discuss the basic action, control mechanisms, phase transitions, and the structure-property correlation of LCEs; this review provides a comprehensive overview of LCEs for applications in actuators and other smart devices. Furthermore, the synthesis and processing of liquid crystal elastomer are briefly discussed, and the current challenges and future opportunities are prospected. With all recent progress pertaining to material design, sophisticated manipulation, and advanced applications presented, a vision for the application of LCEs in the next generation smart robots or automatic action systems is outlined.
Keywords: liquid crystal; liquid crystalline elastomer; smart robots; soft robots.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







References
-
- Majidi C. Soft-Matter Engineering for Soft Robotics. Adv. Mater. Technol. 2019;4:1800477. doi: 10.1002/admt.201800477. - DOI
-
- Li X., Ding C., Li X., Yang H., Liu S., Wang X., Zhang L., Sun Q., Liu X., Chen J. Electronic Biopolymers: From Molecular Engineering to Functional Devices. Chem. Eng. J. 2020;397:125499. doi: 10.1016/j.cej.2020.125499. - DOI
-
- Son H., Yoon C. Advances in Stimuli-Responsive Soft Robots with Integrated Hybrid Materials. Actuators. 2020;9:115. doi: 10.3390/act9040115. - DOI
-
- Zhao Q., Qi H.J., Xie T. Recent Progress in Shape Memory Polymer: New Behavior, Enabling Materials, and Mechanistic Understanding. Prog. Polym. Sci. 2015;49–50:79–120. doi: 10.1016/j.progpolymsci.2015.04.001. - DOI
-
- Meng H., Li G. A Review of Stimuli-Responsive Shape Memory Polymer Composites. Polymer. 2013;54:2199–2221. doi: 10.1016/j.polymer.2013.02.023. - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
