

Toward autonomous robotic prostate biopsy: a pilot study
- PMID: 34224068
- PMCID: PMC8295108
- DOI: 10.1007/s11548-021-02437-7
Toward autonomous robotic prostate biopsy: a pilot study
Abstract
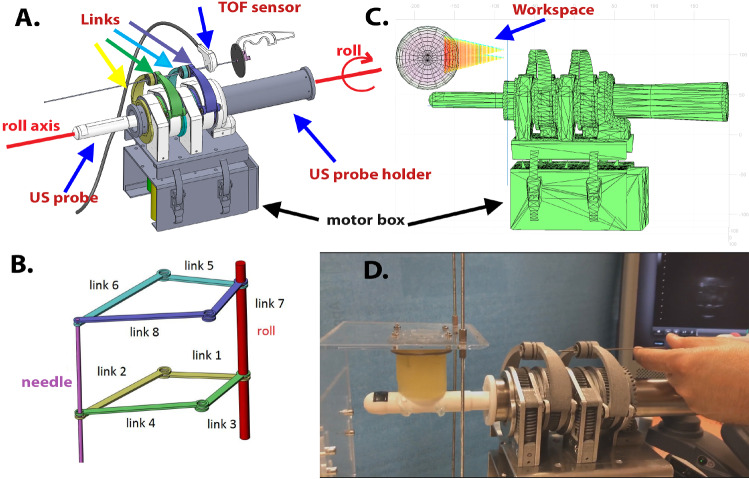
Purpose: We present the validation of PROST, a robotic device for prostate biopsy. PROST is designed to minimize human error by introducing some autonomy in the execution of the key steps of the procedure, i.e., target selection, image fusion and needle positioning. The robot allows executing a targeted biopsy through ultrasound (US) guidance and fusion with magnetic resonance (MR) images, where the target was defined.
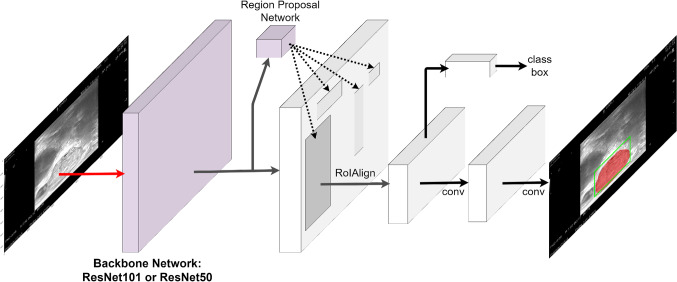
Methods: PROST is a parallel robot with 4 degrees of freedom (DOF) to orient the needle and 1 DOF to rotate the US probe. We reached a calibration error of less than 2 mm, computed as the difference between the needle positioning in robot coordinates and in the US image. The autonomy of the robot is given by the image analysis software, which employs deep learning techniques, the integrated image fusion algorithms and automatic computation of the needle trajectory. For safety reasons, the insertion of the needle is assigned to the doctor.
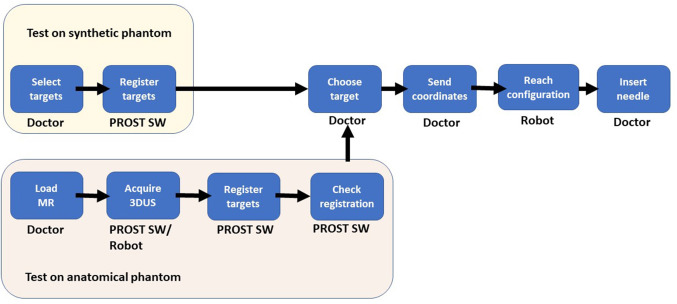
Results: System performance was evaluated in terms of positioning accuracy. Tests were performed on a 3D printed object with nine 2-mm spherical targets and on an anatomical commercial phantom that simulates human prostate with three lesions and the surrounding structures. The average accuracy reached in the laboratory experiments was [Formula: see text] in the first test and [Formula: see text] in the second test.
Conclusions: We introduced a first prototype of a prostate biopsy robot that has the potential to increase the detection of clinically significant prostate cancer and, by including some level of autonomy, to simplify the procedure, to reduce human errors and shorten training time. The use of a robot for the biopsy of the prostate will create the possibility to include also a treatment, such as focal ablation, to be delivered through the same system.
Keywords: Automatic segmentation; Image fusion; Medical robotics; Prostate biopsy; Robot-assisted biopsy.
© 2021. The Author(s).
Conflict of interest statement
The authors declare that they have no conflict of interest.
Figures





References
-
- Besl PJ, McKay ND (1992) A method for registration of 3-d shapes. In: Sensor fusion IV: control paradigms and data structures, vol. 1611. International Society for Optics and Photonics, pp 586–606
-
- He K, Gkioxari G, Dollár P, Girshick R (2017) Mask r-cnn. In: Proceedings of the IEEE international conference on computer vision, pp 2961–2969
-
- He K, Zhang X, Ren S, Sun J (2016) Deep residual learning for image recognition. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 770–778
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
