

Neural encoding and functional interactions underlying pantomimed movements
- PMID: 34247268
- PMCID: PMC8354930
- DOI: 10.1007/s00429-021-02332-6
Neural encoding and functional interactions underlying pantomimed movements
Abstract
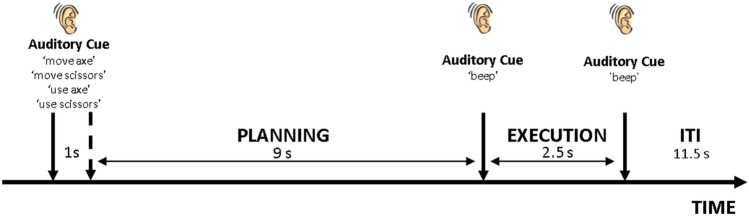
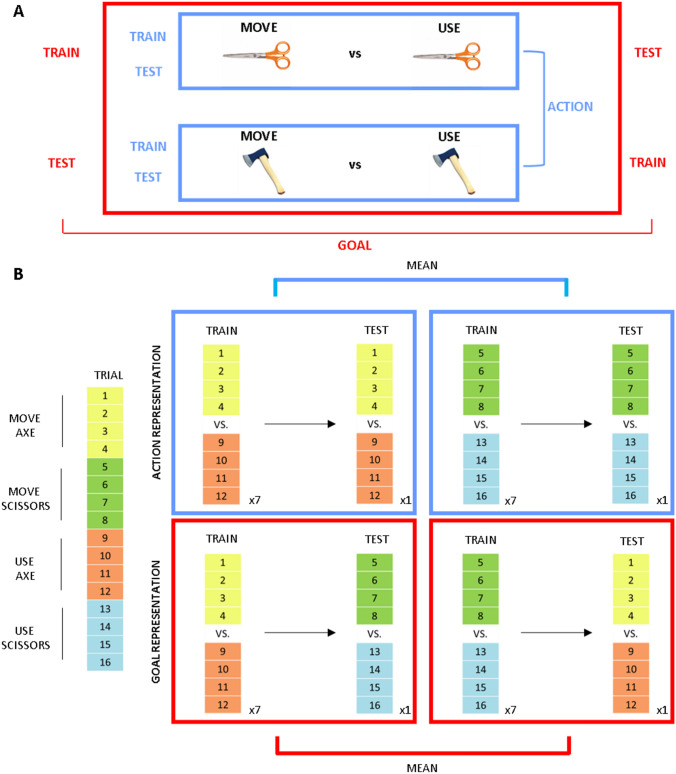
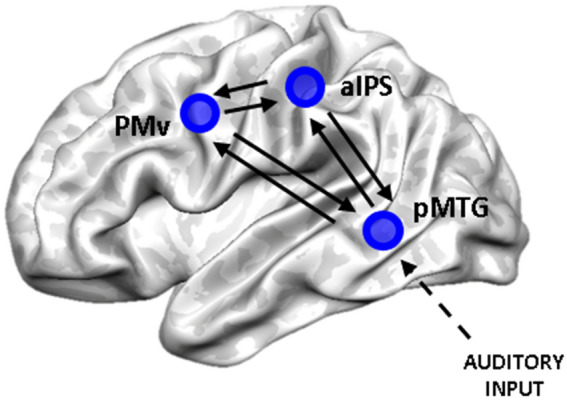
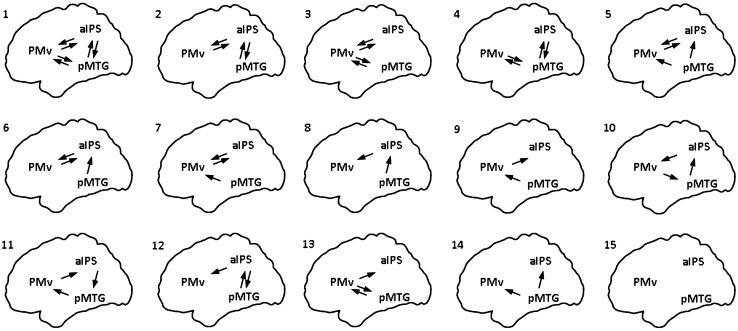
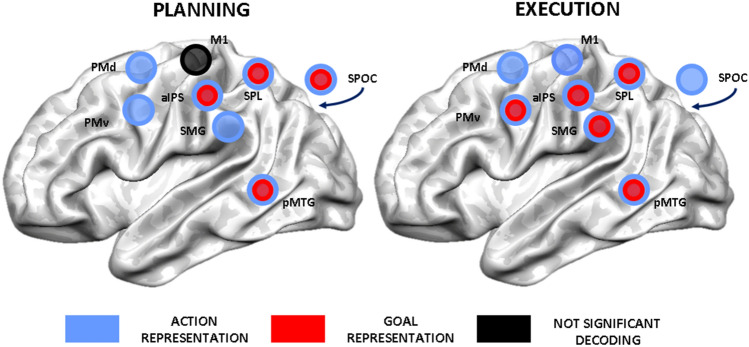
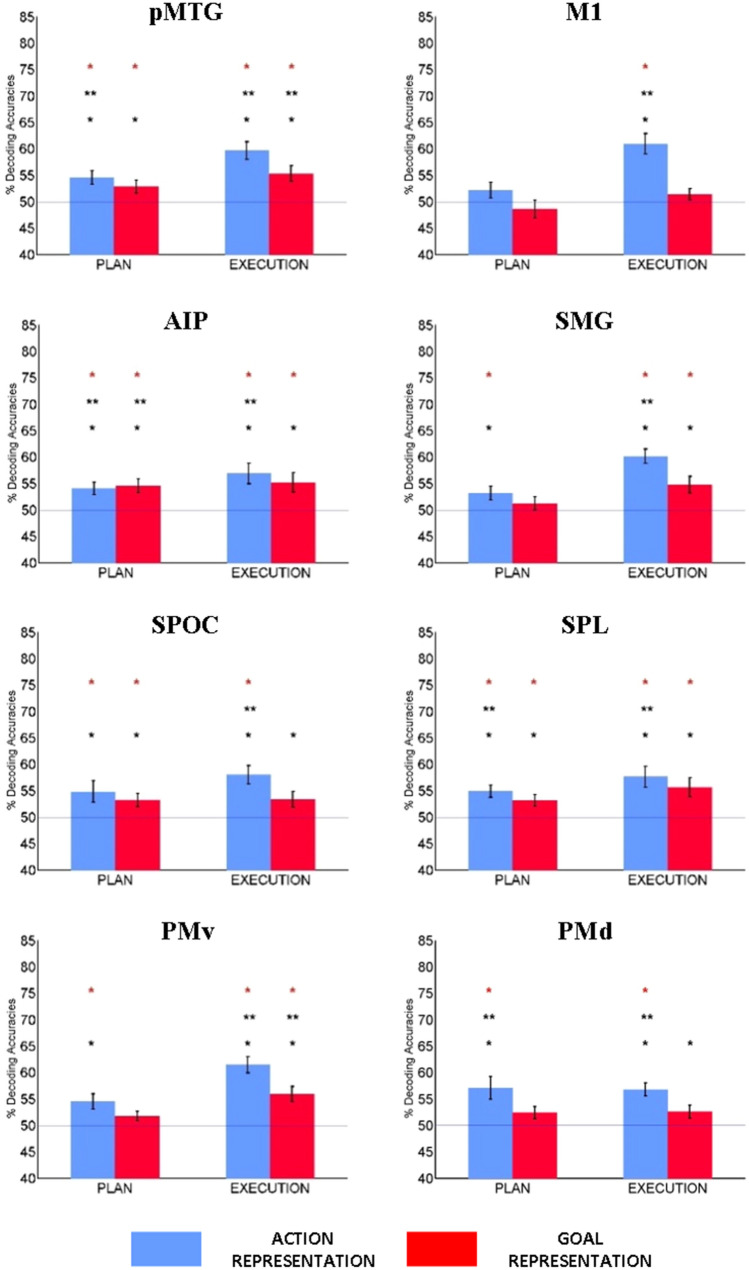
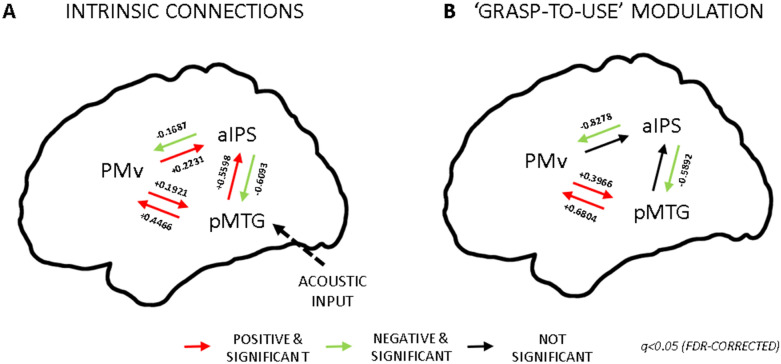
Pantomimes are a unique movement category which can convey complex information about our intentions in the absence of any interaction with real objects. Indeed, we can pretend to use the same tool to perform different actions or to achieve the same goal adopting different tools. Nevertheless, how our brain implements pantomimed movements is still poorly understood. In our study, we explored the neural encoding and functional interactions underlying pantomimes adopting multivariate pattern analysis (MVPA) and connectivity analysis of fMRI data. Participants performed pantomimed movements, either grasp-to-move or grasp-to-use, as if they were interacting with two different tools (scissors or axe). These tools share the possibility to achieve the same goal. We adopted MVPA to investigate two levels of representation during the planning and execution of pantomimes: (1) distinguishing different actions performed with the same tool, (2) representing the same final goal irrespective of the adopted tool. We described widespread encoding of action information within regions of the so-called "tool" network. Several nodes of the network-comprising regions within the ventral and the dorsal stream-also represented goal information. The spatial distribution of goal information changed from planning-comprising posterior regions (i.e. parietal and temporal)-to execution-including also anterior regions (i.e. premotor cortex). Moreover, connectivity analysis provided evidence for task-specific bidirectional coupling between the ventral stream and parieto-frontal motor networks. Overall, we showed that pantomimes were characterized by specific patterns of action and goal encoding and by task-dependent cortical interactions.
Keywords: Action; Connectivity; Goal; MVPA; Motor system; Pantomime; Tool; fMRI.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing financial interests.
Figures
Similar articles
-
Action goals and the praxis network: an fMRI study.Brain Struct Funct. 2022 Sep;227(7):2261-2284. doi: 10.1007/s00429-022-02520-y. Epub 2022 Jun 22. Brain Struct Funct. 2022. PMID: 35731447 Free PMC article.
-
The "What" and "How" of Pantomime Actions.Vision (Basel). 2024 Sep 26;8(4):58. doi: 10.3390/vision8040058. Vision (Basel). 2024. PMID: 39449391 Free PMC article. Review.
-
Task- and domain-specific modulation of functional connectivity in the ventral and dorsal object-processing pathways.Brain Struct Funct. 2018 Jul;223(6):2589-2607. doi: 10.1007/s00429-018-1641-1. Epub 2018 Mar 13. Brain Struct Funct. 2018. PMID: 29536173 Free PMC article.
-
Decoding Brain States for Planning Functional Grasps of Tools: A Functional Magnetic Resonance Imaging Multivoxel Pattern Analysis Study.J Int Neuropsychol Soc. 2018 Nov;24(10):1013-1025. doi: 10.1017/S1355617718000590. Epub 2018 Sep 10. J Int Neuropsychol Soc. 2018. PMID: 30196800
-
Grasping and Manipulation: Neural Bases and Anatomical Circuitry in Humans.Neuroscience. 2021 Mar 15;458:203-212. doi: 10.1016/j.neuroscience.2021.01.028. Epub 2021 Jan 29. Neuroscience. 2021. PMID: 33516776 Review.
Cited by
-
Action goals and the praxis network: an fMRI study.Brain Struct Funct. 2022 Sep;227(7):2261-2284. doi: 10.1007/s00429-022-02520-y. Epub 2022 Jun 22. Brain Struct Funct. 2022. PMID: 35731447 Free PMC article.
-
Human Neuroimaging Reveals Differences in Activation and Connectivity between Real and Pantomimed Tool Use.J Neurosci. 2023 Nov 15;43(46):7853-7867. doi: 10.1523/JNEUROSCI.0068-23.2023. Epub 2023 Sep 18. J Neurosci. 2023. PMID: 37722847 Free PMC article.
-
The "What" and "How" of Pantomime Actions.Vision (Basel). 2024 Sep 26;8(4):58. doi: 10.3390/vision8040058. Vision (Basel). 2024. PMID: 39449391 Free PMC article. Review.
References
-
- Benjamini J, Yekutieli D. The control of the false discovery rate in multiple testing under dependency. Ann Stat. 2001;29:1165–1188. doi: 10.1214/aos/1013699998. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
