

Fully 3D-printed soft robots with integrated fluidic circuitry
- PMID: 34261646
- PMCID: PMC8279518
- DOI: 10.1126/sciadv.abe5257
Fully 3D-printed soft robots with integrated fluidic circuitry
Abstract
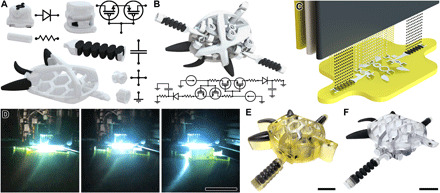
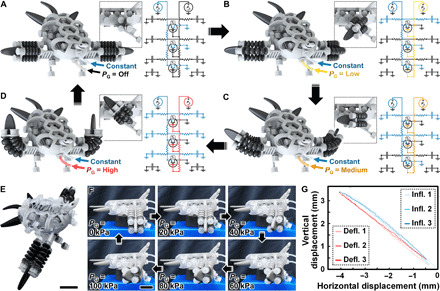
The emergence of soft robots has presented new challenges associated with controlling the underlying fluidics of such systems. Here, we introduce a strategy for additively manufacturing unified soft robots comprising fully integrated fluidic circuitry in a single print run via PolyJet three-dimensional (3D) printing. We explore the efficacy of this approach for soft robots designed to leverage novel 3D fluidic circuit elements-e.g., fluidic diodes, "normally closed" transistors, and "normally open" transistors with geometrically tunable pressure-gain functionalities-to operate in response to fluidic analogs of conventional electronic signals, including constant-flow ["direct current (DC)"], "alternating current (AC)"-inspired, and preprogrammed aperiodic ("variable current") input conditions. By enabling fully integrated soft robotic entities (composed of soft actuators, fluidic circuitry, and body features) to be rapidly disseminated, modified on demand, and 3D-printed in a single run, the presented design and additive manufacturing strategy offers unique promise to catalyze new classes of soft robots.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures



References
-
- Morin S. A., Shepherd R. F., Kwok S. W., Stokes A. A., Nemiroski A., Whitesides G. M., Camouflage and display for soft machines. Science 337, 828–832 (2012). - PubMed
-
- Rus D., Tolley M. T., Design, fabrication, and control of soft robots. Nature 521, 467–475 (2015). - PubMed
-
- Ilievski F., Mazzeo A. D., Shepherd R. F., Chen X., Whitesides G. M., Soft robotics for chemists. Angew. Chem. Int. Ed. 50, 1890–1895 (2011). - PubMed
-
- Polygerinos P., Wang Z., Galloway K. C., Wood R. J., Walsh C. J., Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 73, 135–143 (2015).
LinkOut - more resources
Full Text Sources
Other Literature Sources
