

Review of control strategies for lower-limb exoskeletons to assist gait
- PMID: 34315499
- PMCID: PMC8314580
- DOI: 10.1186/s12984-021-00906-3
Review of control strategies for lower-limb exoskeletons to assist gait
Abstract
Background: Many lower-limb exoskeletons have been developed to assist gait, exhibiting a large range of control methods. The goal of this paper is to review and classify these control strategies, that determine how these devices interact with the user.
Methods: In addition to covering the recent publications on the control of lower-limb exoskeletons for gait assistance, an effort has been made to review the controllers independently of the hardware and implementation aspects. The common 3-level structure (high, middle, and low levels) is first used to separate the continuous behavior (mid-level) from the implementation of position/torque control (low-level) and the detection of the terrain or user's intention (high-level). Within these levels, different approaches (functional units) have been identified and combined to describe each considered controller.
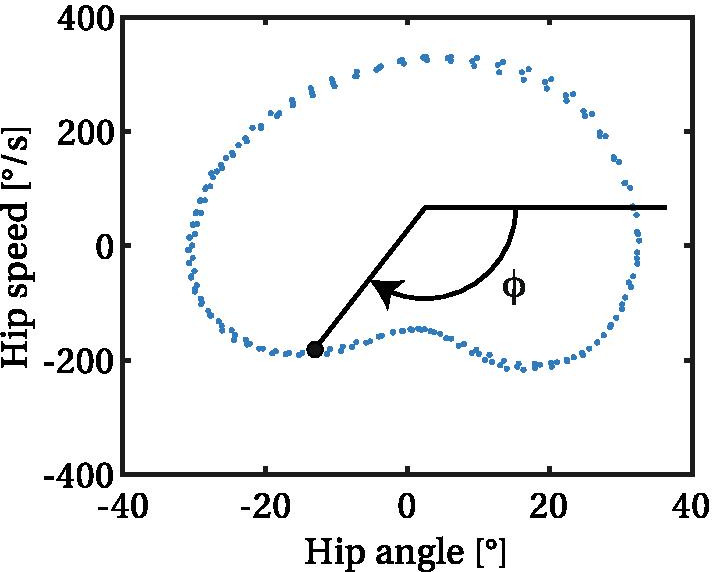
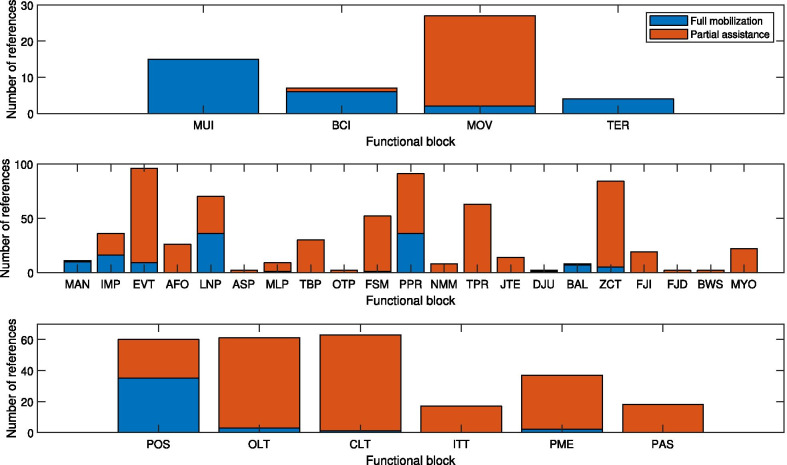
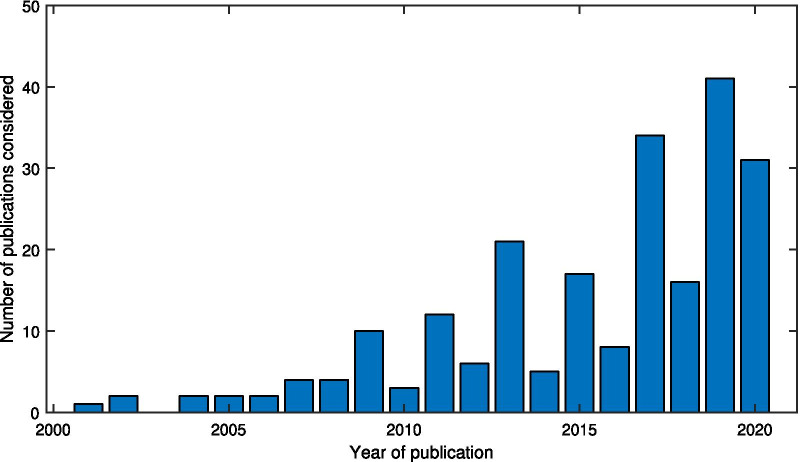
Results: 291 references have been considered and sorted by the proposed classification. The methods identified in the high-level are manual user input, brain interfaces, or automatic mode detection based on the terrain or user's movements. In the mid-level, the synchronization is most often based on manual triggers by the user, discrete events (followed by state machines or time-based progression), or continuous estimations using state variables. The desired action is determined based on position/torque profiles, model-based calculations, or other custom functions of the sensory signals. In the low-level, position or torque controllers are used to carry out the desired actions. In addition to a more detailed description of these methods, the variants of implementation within each one are also compared and discussed in the paper.
Conclusions: By listing and comparing the features of the reviewed controllers, this work can help in understanding the numerous techniques found in the literature. The main identified trends are the use of pre-defined trajectories for full-mobilization and event-triggered (or adaptive-frequency-oscillator-synchronized) torque profiles for partial assistance. More recently, advanced methods to adapt the position/torque profiles online and automatically detect terrains or locomotion modes have become more common, but these are largely still limited to laboratory settings. An analysis of the possible underlying reasons of the identified trends is also carried out and opportunities for further studies are discussed.
Keywords: Control; Exoskeleton; Lower-limb; Review.
© 2021. The Author(s).
Conflict of interest statement
The authors declare that they have no competing interests.
Figures





References
-
- Yan T, Cempini M, Oddo CM, Vitiello N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot Autonom Syst. 2015;64:120–136. doi: 10.1016/j.robot.2014.09.032. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
