

Mapping surgical fields by moving a laser-scanning multimodal scope attached to a robot arm
- PMID: 34321710
- PMCID: PMC8315033
- DOI: 10.1117/12.2044165
Mapping surgical fields by moving a laser-scanning multimodal scope attached to a robot arm
Abstract
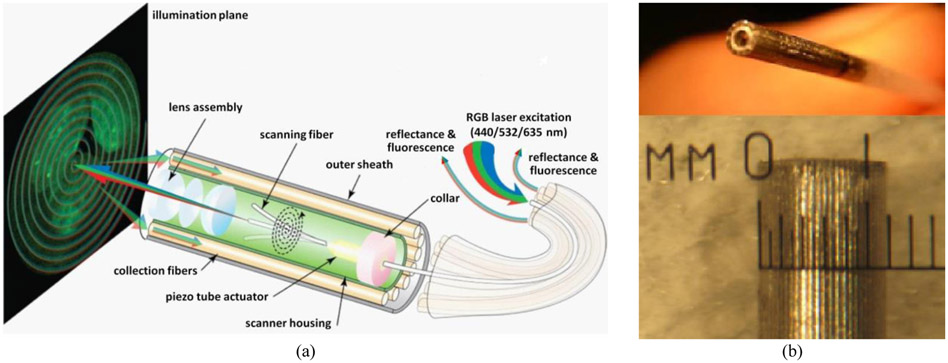
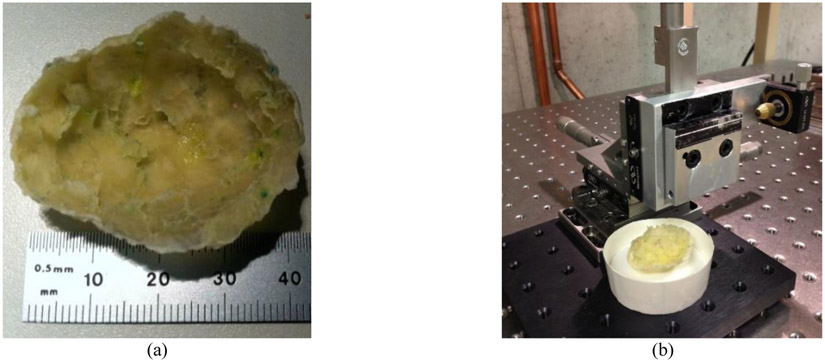
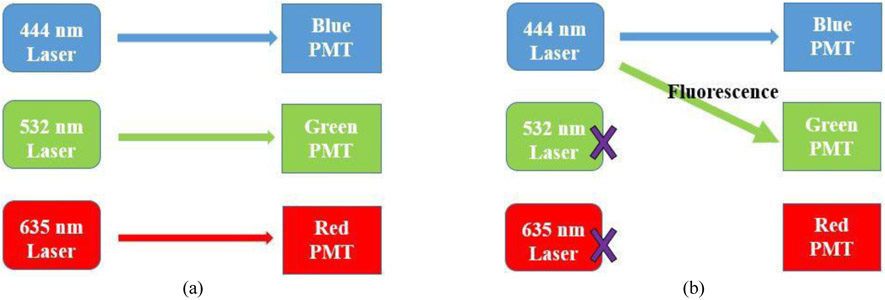
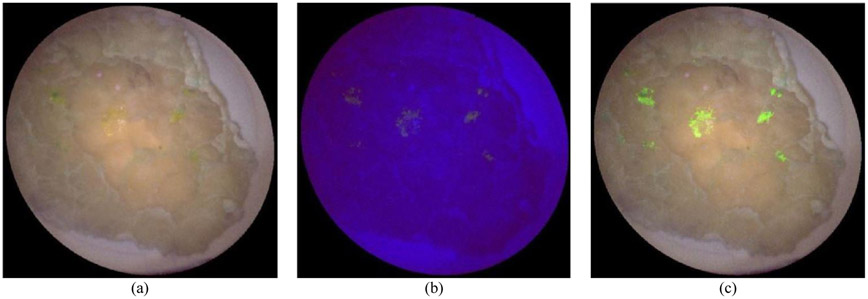
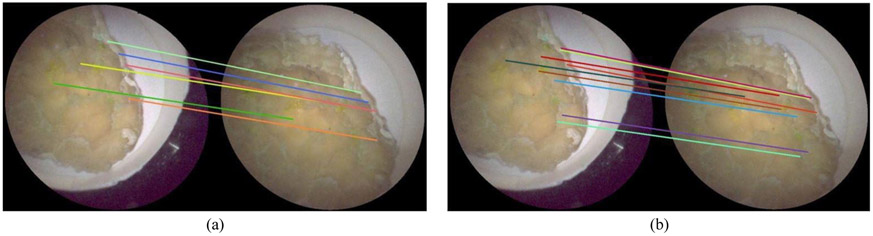
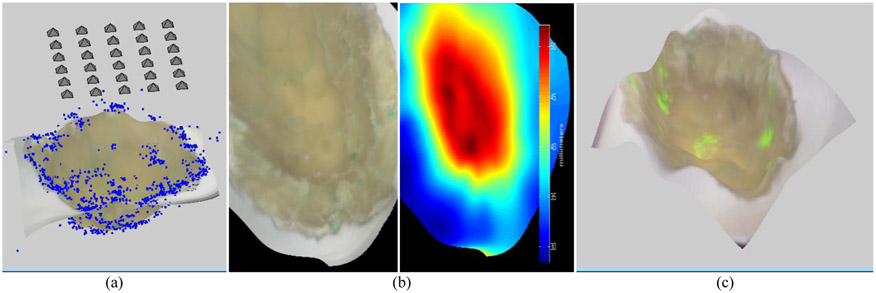
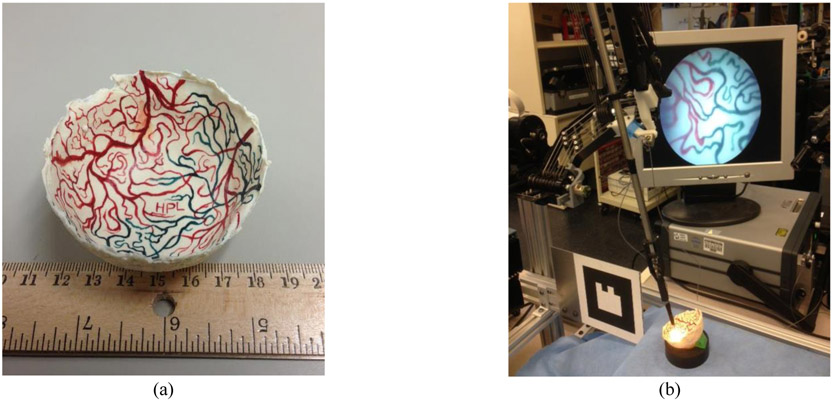
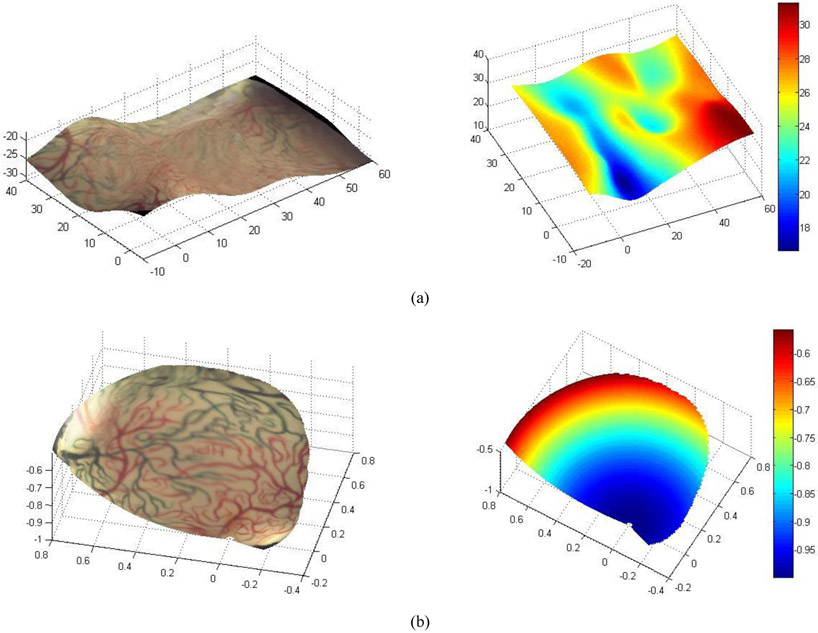
Endoscopic visualization in brain tumor removal is challenging because tumor tissue is often visually indistinguishable from healthy tissue. Fluorescence imaging can improve tumor delineation, though this impairs reflectance-based visualization of gross anatomical features. To accurately navigate and resect tumors, we created an ultrathin/flexible, scanning fiber endoscope (SFE) that acquires reflectance and fluorescence wide-field images at high-resolution. Furthermore, our miniature imaging system is affixed to a robotic arm providing programmable motion of SFE, from which we generate multimodal surface maps of the surgical field. To test this system, synthetic phantoms of debulked tumor from brain are fabricated having spots of fluorescence representing residual tumor. Three-dimension (3D) surface maps of this surgical field are produced by moving the SFE over the phantom during concurrent reflectance and fluorescence imaging (30Hz video). SIFT-based feature matching between reflectance images is implemented to select a subset of key frames, which are reconstructed in 3D by bundle adjustment. The resultant reconstruction yields a multimodal 3D map of the tumor region that can improve visualization and robotic path planning. Efficiency of creating these 3D maps is important as they are generated multiple times during tumor margin clean-up. By using pre-programmed motions of the robot arm holding the SFE, the computer vision algorithms are optimized for efficiency by reducing search times. Preliminary results indicate that the time for creating these multimodal maps of the surgical field can be reduced to one third by using known trajectories of the surgical robot moving the image-guided tool.
Keywords: 3D surface mosaic; fluorescence-guided surgery; image-guided therapy; machine vision; medical robotics.
Figures
Similar articles
-
Accurate three-dimensional virtual reconstruction of surgical field using calibrated trajectories of an image-guided medical robot.J Med Imaging (Bellingham). 2014 Oct;1(3):035002. doi: 10.1117/1.JMI.1.3.035002. Epub 2014 Dec 2. J Med Imaging (Bellingham). 2014. PMID: 26158071 Free PMC article.
-
Toward real-time endoscopically-guided robotic navigation based on a 3D virtual surgical field model.Proc SPIE Int Soc Opt Eng. 2015;9415:94150C. doi: 10.1117/12.2082872. Proc SPIE Int Soc Opt Eng. 2015. PMID: 25821389 Free PMC article.
-
A novel 3D-vision-based collaborative robot as a scope holding system for port surgery: a technical feasibility study.Neurosurg Focus. 2022 Jan;52(1):E13. doi: 10.3171/2021.10.FOCUS21484. Neurosurg Focus. 2022. PMID: 34973666
-
Scanning fiber endoscopy with highly flexible, 1 mm catheterscopes for wide-field, full-color imaging.J Biophotonics. 2010 Jun;3(5-6):385-407. doi: 10.1002/jbio.200900087. J Biophotonics. 2010. PMID: 20336702 Free PMC article. Review.
-
The Adaptive Hermite Fractal Tree (AHFT): a novel surgical 3D path planning approach with curvature and heading constraints.Int J Comput Assist Radiol Surg. 2019 Apr;14(4):659-670. doi: 10.1007/s11548-019-01923-3. Epub 2019 Feb 21. Int J Comput Assist Radiol Surg. 2019. PMID: 30790172 Free PMC article. Review.
Cited by
-
Axial-Stereo 3-D Optical Metrology for Inner Profile of Pipes Using a Scanning Laser Endoscope.Int J Optomechatronics. 2015;9(3):238-247. doi: 10.1080/15599612.2015.1059535. Epub 2015 Jun 24. Int J Optomechatronics. 2015. PMID: 26640425 Free PMC article.
-
Bound constrained bundle adjustment for reliable 3D reconstruction.Opt Express. 2015 Apr 20;23(8):10771-85. doi: 10.1364/OE.23.010771. Opt Express. 2015. PMID: 25969115 Free PMC article.
-
Miniature in vivo MEMS-based line-scanned dual-axis confocal microscope for point-of-care pathology.Biomed Opt Express. 2016 Jan 5;7(2):251-63. doi: 10.1364/BOE.7.000251. eCollection 2016 Feb 1. Biomed Opt Express. 2016. PMID: 26977337 Free PMC article.
-
Accurate three-dimensional virtual reconstruction of surgical field using calibrated trajectories of an image-guided medical robot.J Med Imaging (Bellingham). 2014 Oct;1(3):035002. doi: 10.1117/1.JMI.1.3.035002. Epub 2014 Dec 2. J Med Imaging (Bellingham). 2014. PMID: 26158071 Free PMC article.
-
Multimodal 3D cancer-mimicking optical phantom.Biomed Opt Express. 2016 Jan 25;7(2):648-62. doi: 10.1364/BOE.7.000648. eCollection 2016 Feb 1. Biomed Opt Express. 2016. PMID: 26977369 Free PMC article.
References
-
- Soroceanu L, Gillespie Y, Khazaeli MB, and Sontheimer H, “Use of chlorotoxin for targeting of primary brain tumors,” Cancer Res. 58: 4871–9 (1998). - PubMed
-
- Veiseh M, Gabikian P, Bahrami SB, Veiseh O, …, Ellenbogen RG, and Olson JA, “Tumor paint: a chlorotoxin: Cy5.5 bioconjugate for intraoperative visualization of cancer foci.,” Cancer Res. 67:6882–8 (2007). - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources