

Noninvasive Brain-Computer Interfaces Based on Sensorimotor Rhythms
- PMID: 34334804
- PMCID: PMC8323842
- DOI: 10.1109/jproc.2015.2407272
Noninvasive Brain-Computer Interfaces Based on Sensorimotor Rhythms
Abstract
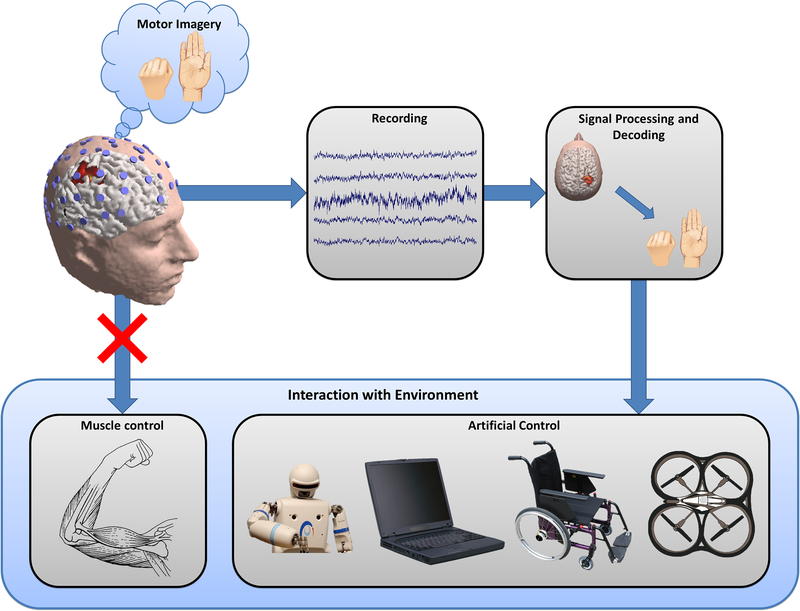
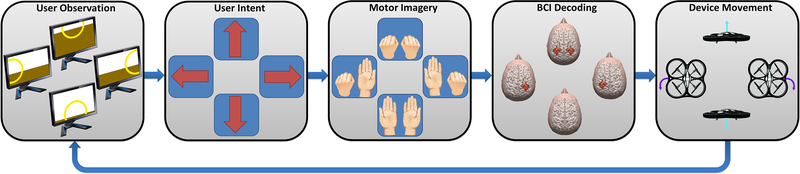
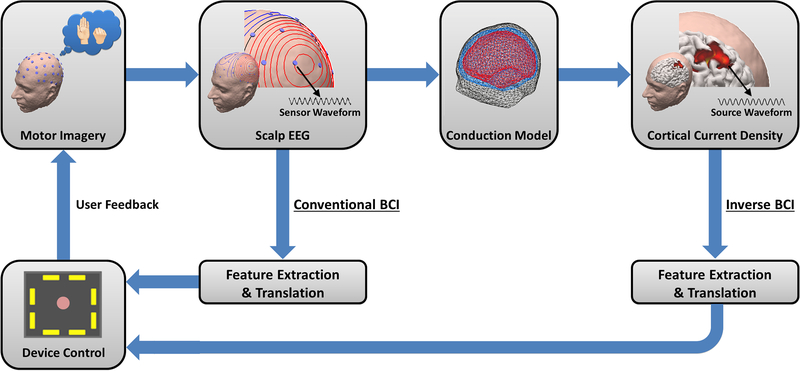
Brain-computer interfaces (BCIs) have been explored in the field of neuroengineering to investigate how the brain can use these systems to control external devices. We review the principles and approaches we have taken to develop a sensorimotor rhythm EEG based brain-computer interface (BCI). The methods include developing BCI systems incorporating the control of physical devices to increase user engagement, improving BCI systems by inversely mapping scalp-recorded EEG signals to the cortical source domain, integrating BCI with noninvasive neuromodulation strategies to improve learning, and incorporating mind-body awareness training to enhance BCI learning and performance. The challenges and merits of these strategies are discussed, together with recent findings. Our work indicates that the sensorimotor-rhythm-based noninvasive BCI has the potential to provide communication and control capabilities as an alternative to physiological motor pathways.
Keywords: BCI; BMI; Brain-computer interface; EEG; brain-machine interface; motor imagery; neural interface; sensorimotor rhythm.
Figures
References
-
- Wolpaw JR, Birbaumer N, McFarland DJ, Pfurtscheller G, and Vaughan TM, “Brain-computer interfaces for communication and control,” Clin. Neurophysiol, vol. 113, no. 6, pp. 767–91, June. 2002. - PubMed
-
- Taylor DM, Tillery SIH, and Schwartz AB, “Direct cortical control of 3D neuroprosthetic devices,” Science, vol. 296, no. 5574, pp. 1829–32, June. 2002. - PubMed
-
- Vallabhaneni A, Wang T, and He B, “Brain-Computer Interface,” In Neural Engineering, ed. He B, Kruwer Academic Publishers, 2005, pp. 85–121.
-
- Hochberg LR, Serruya MD, Friehs GM, Mukand JA, Saleh M, Caplan AH, Branner A, Chen D, Penn RD, and Donoghue JP, “Neuronal ensemble control of prosthetic devices by a human with tetraplegia,” Nature, vol. 442, no. 7099, pp. 164–71, July. 2006. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources