

Systems Neuroengineering: Understanding and Interacting with the Brain
- PMID: 34336364
- PMCID: PMC8323844
- DOI: 10.15302/j-eng-2015078
Systems Neuroengineering: Understanding and Interacting with the Brain
Abstract
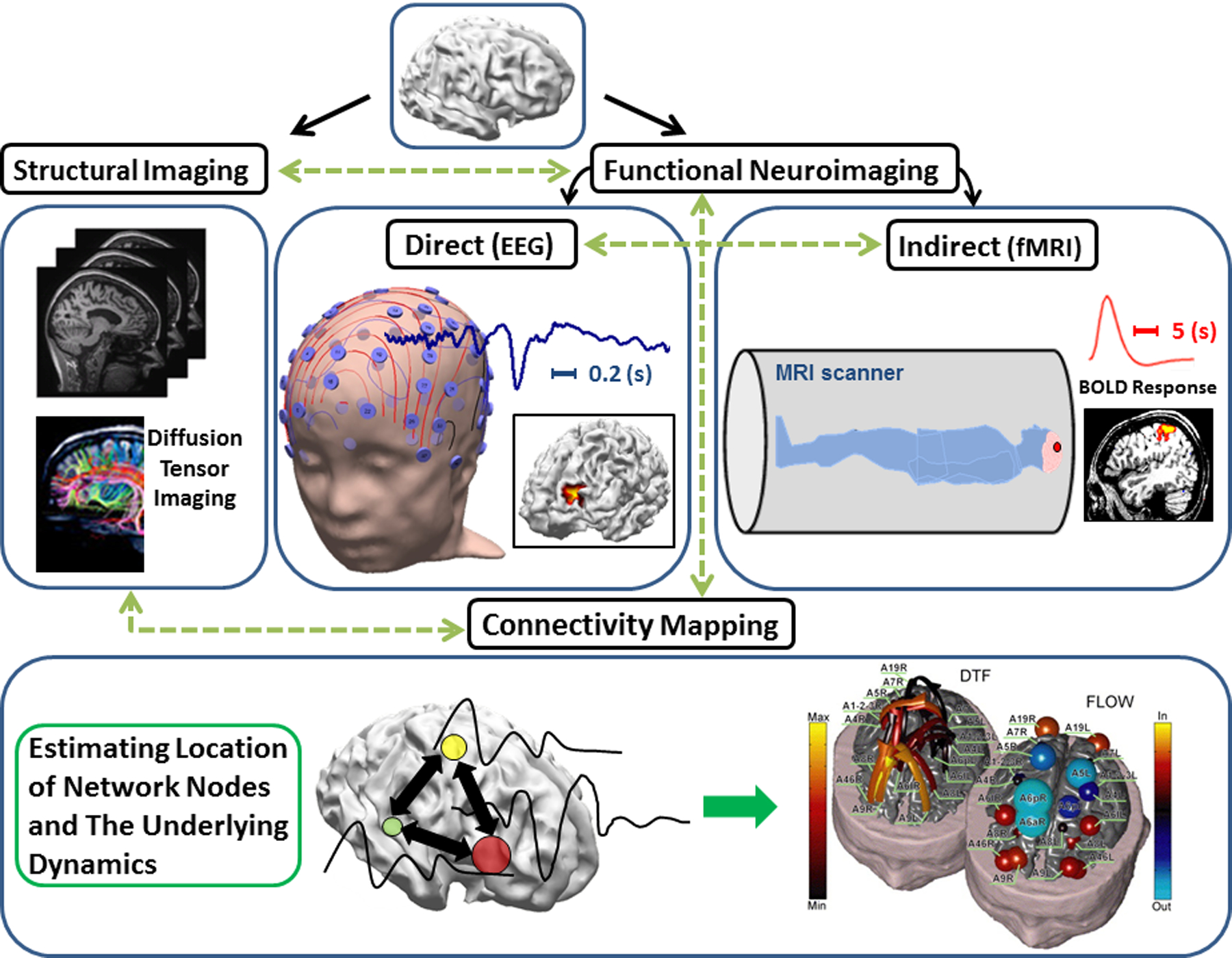
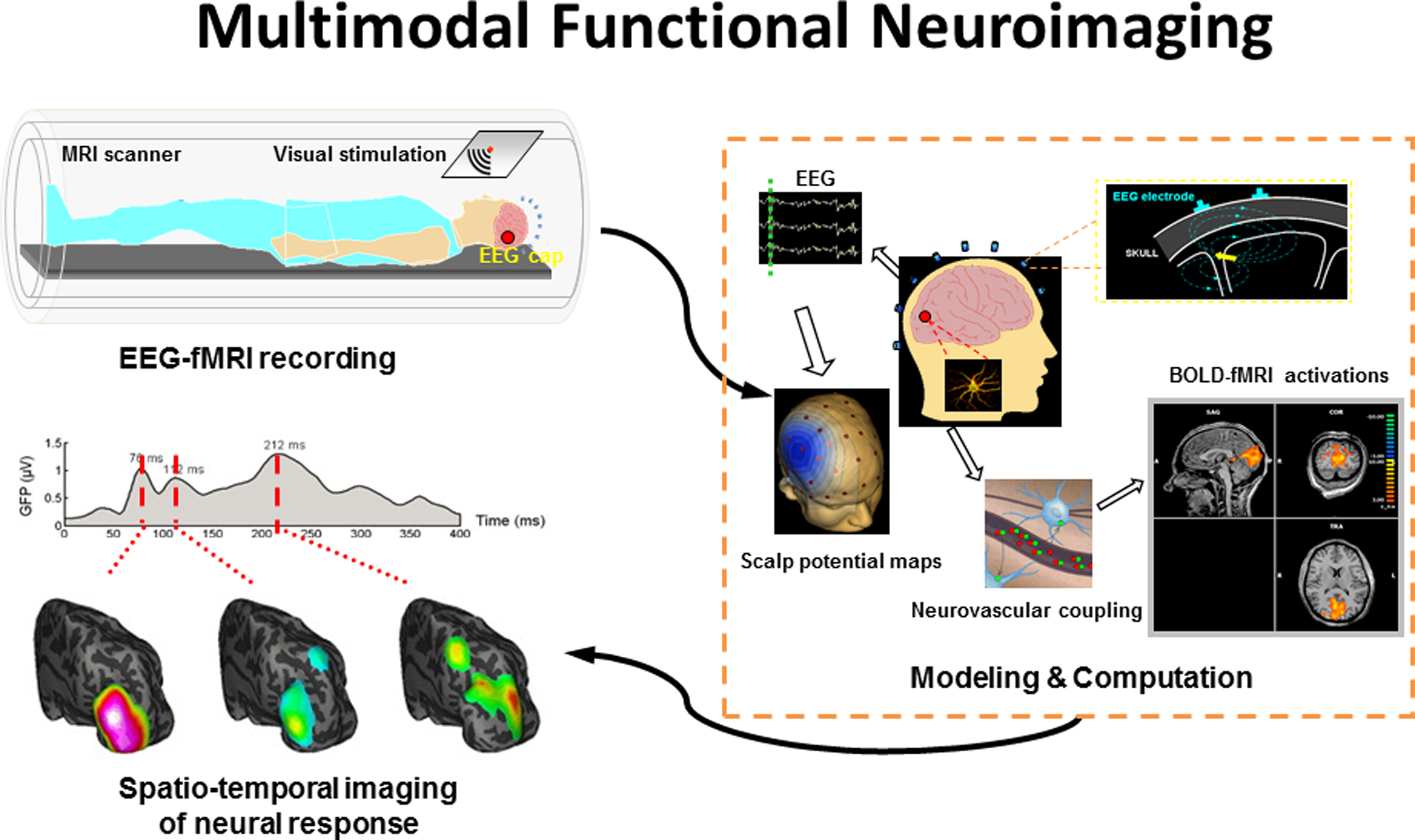
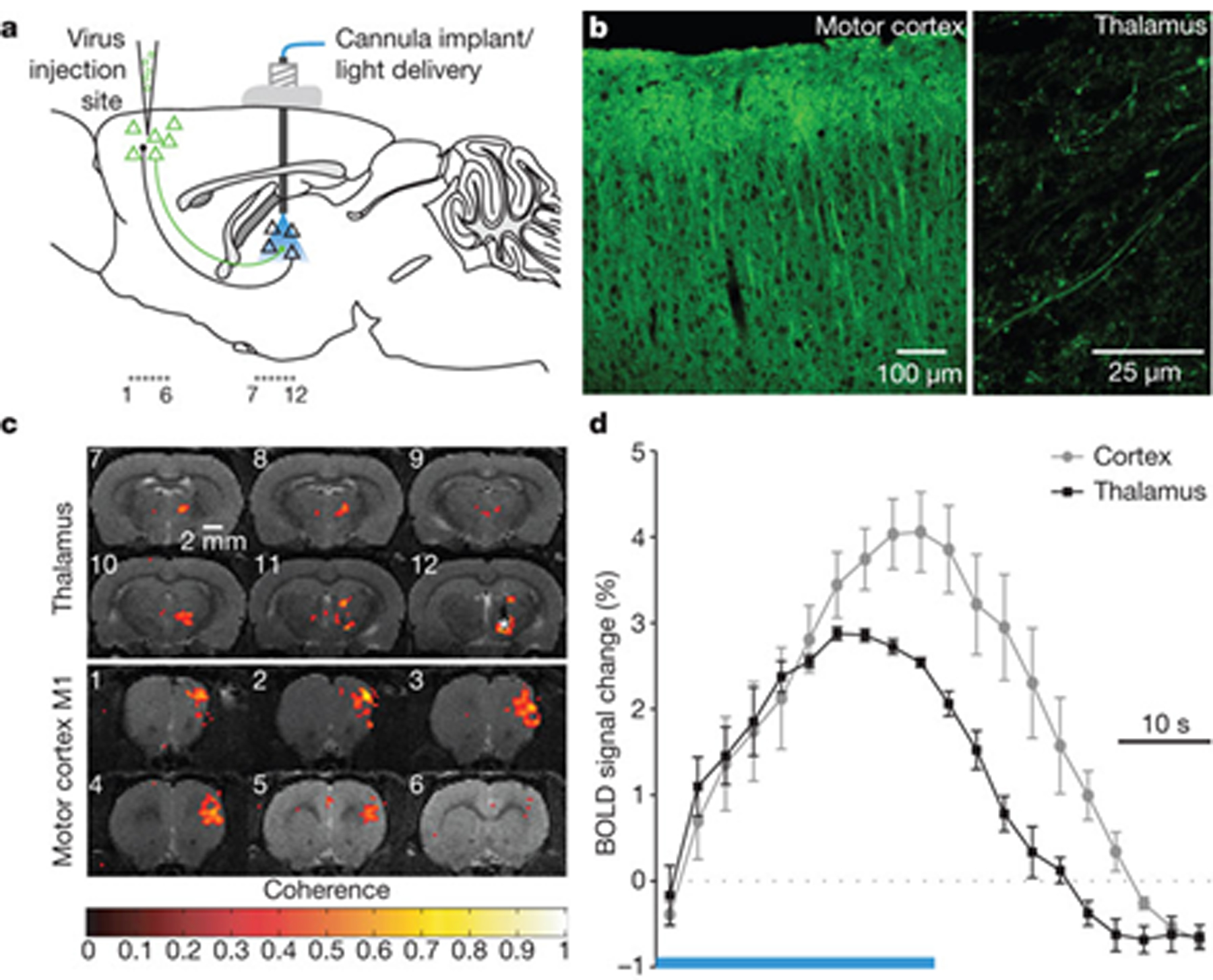
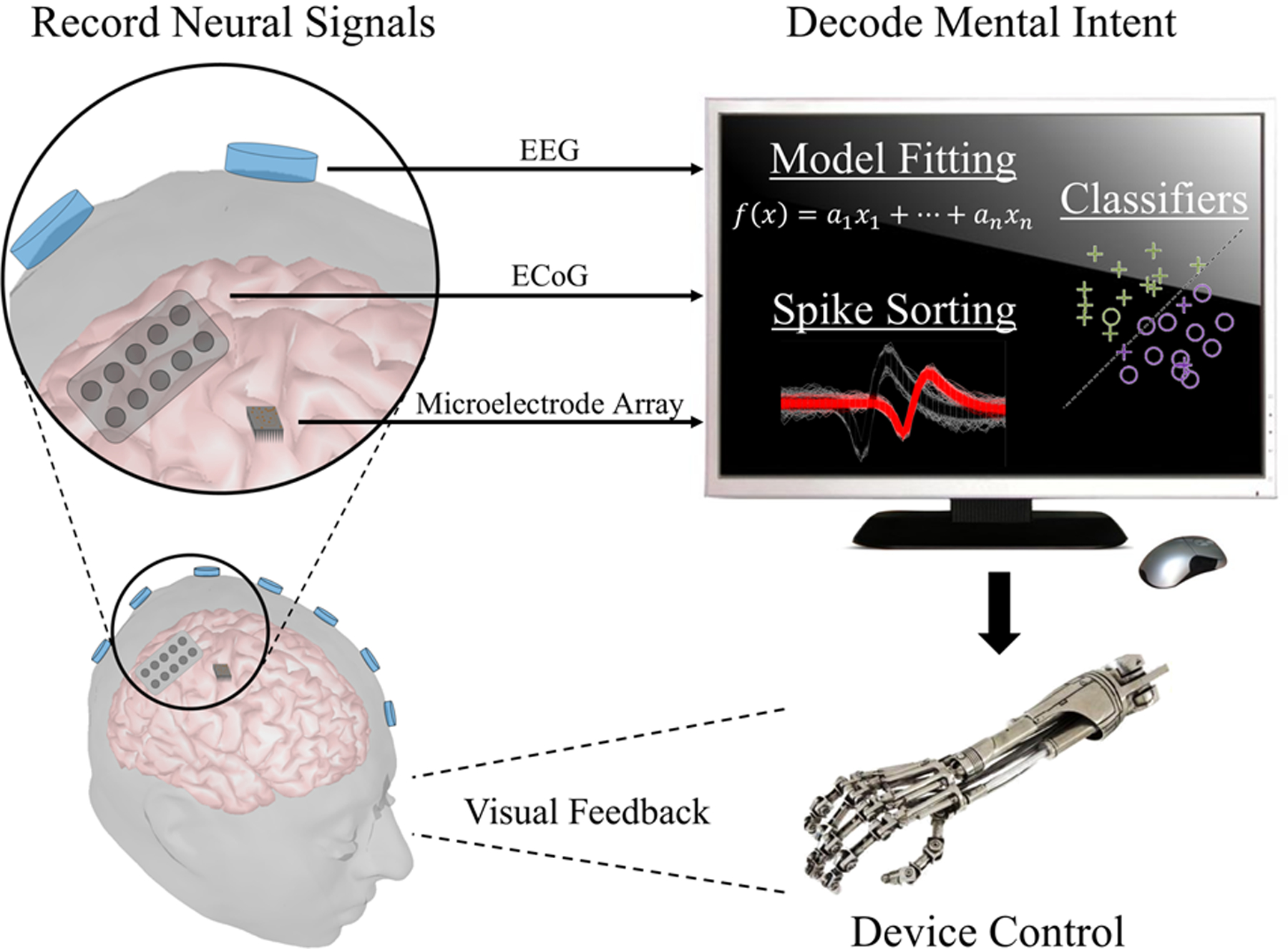
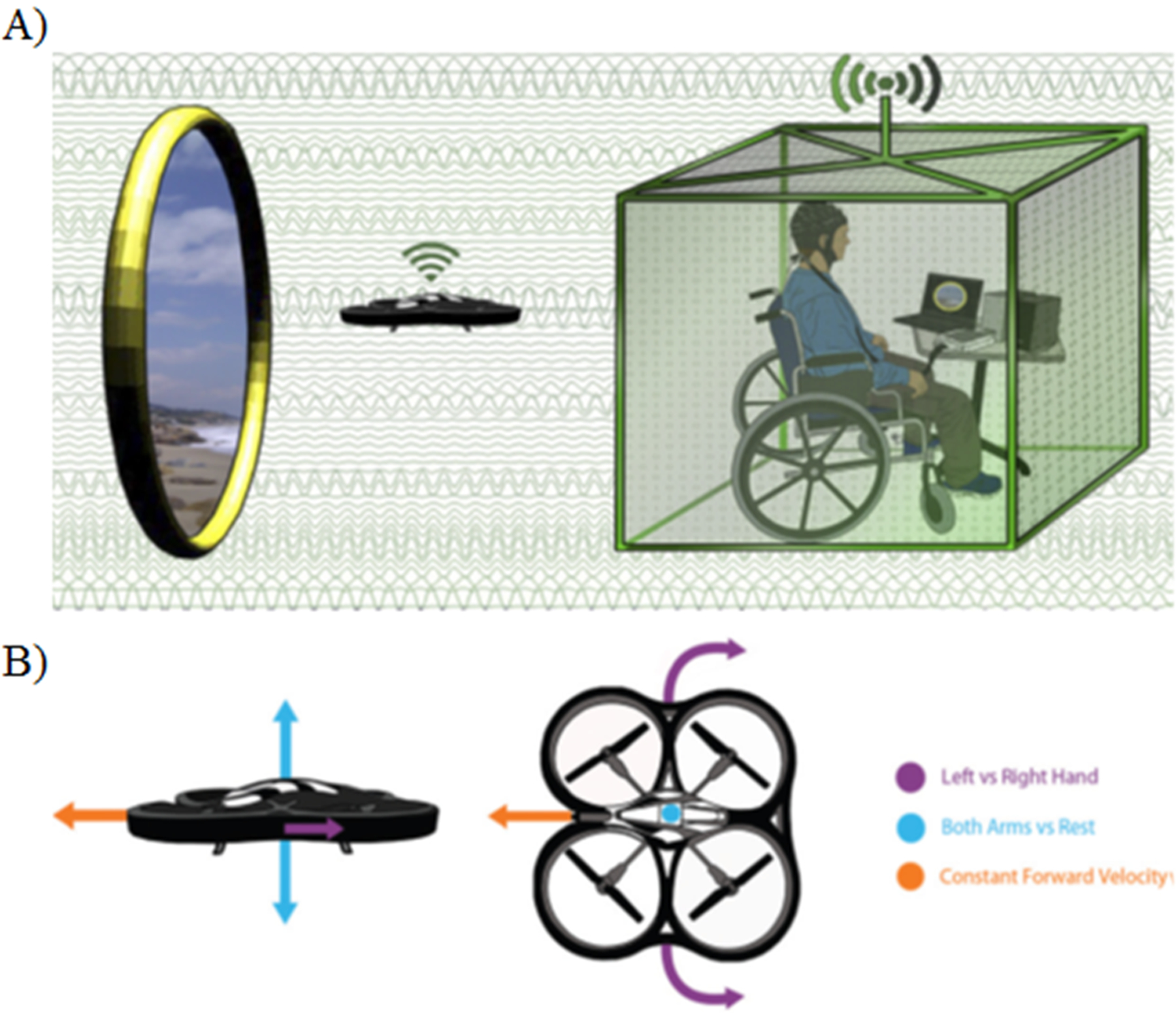
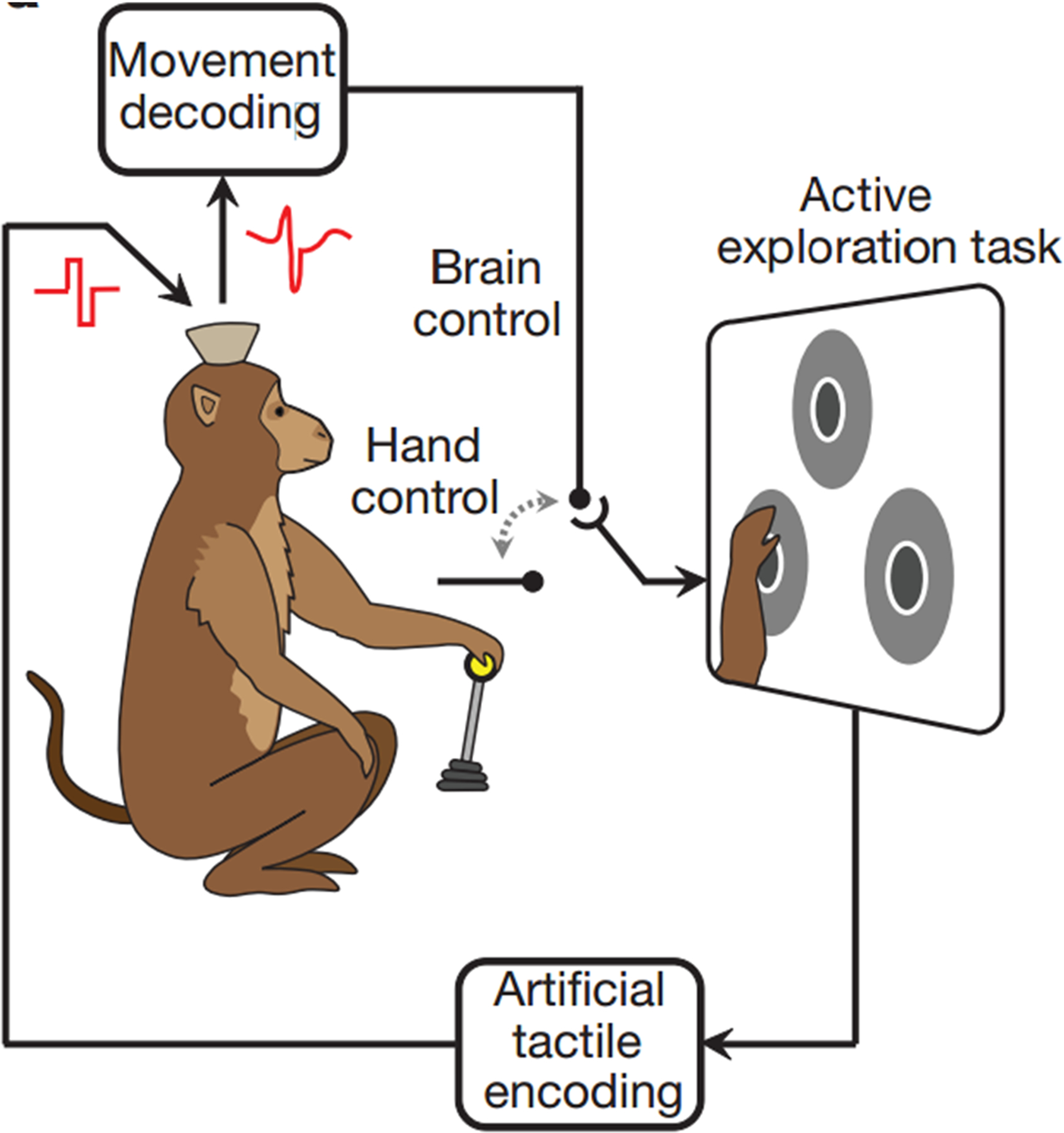
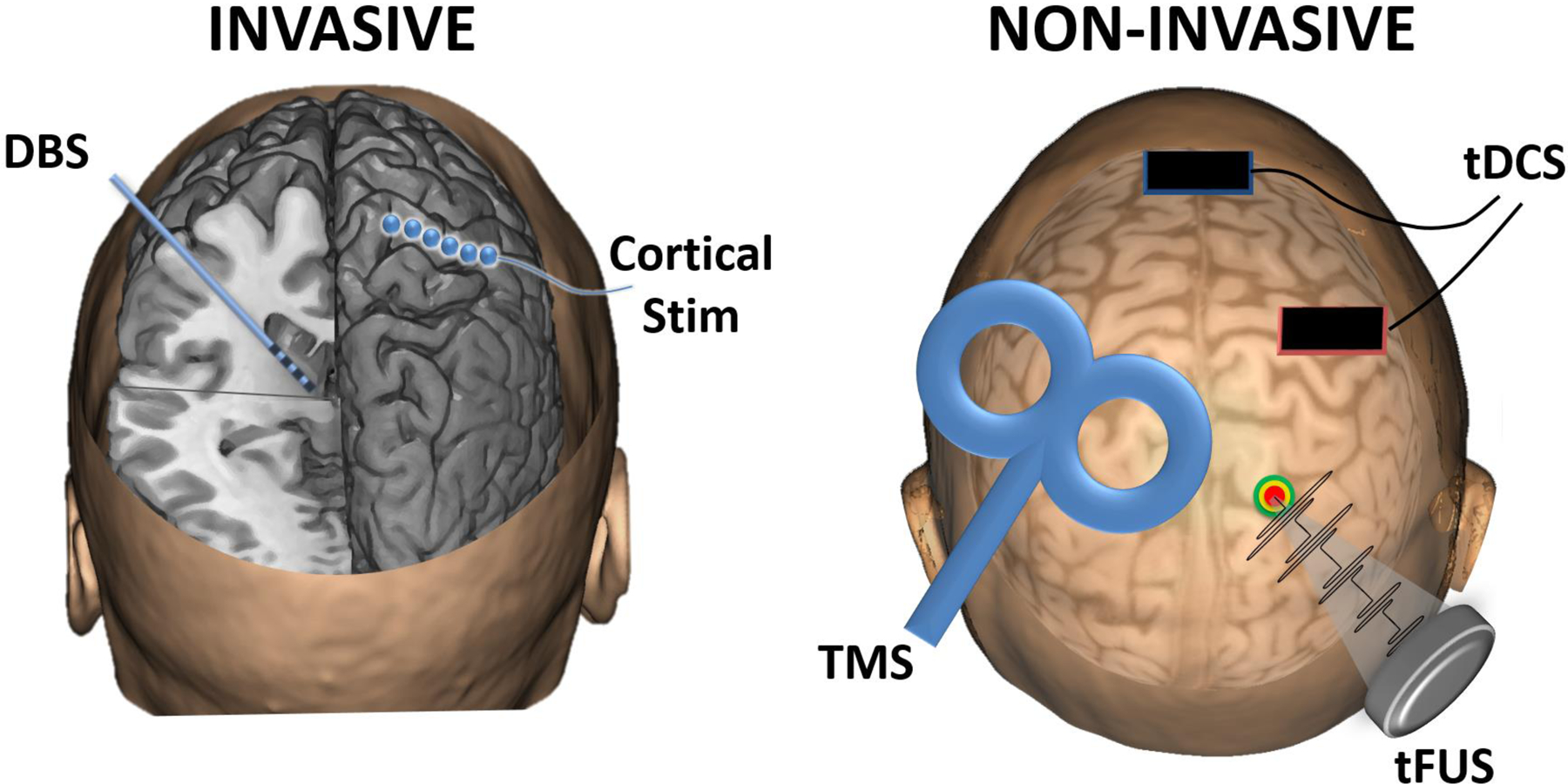
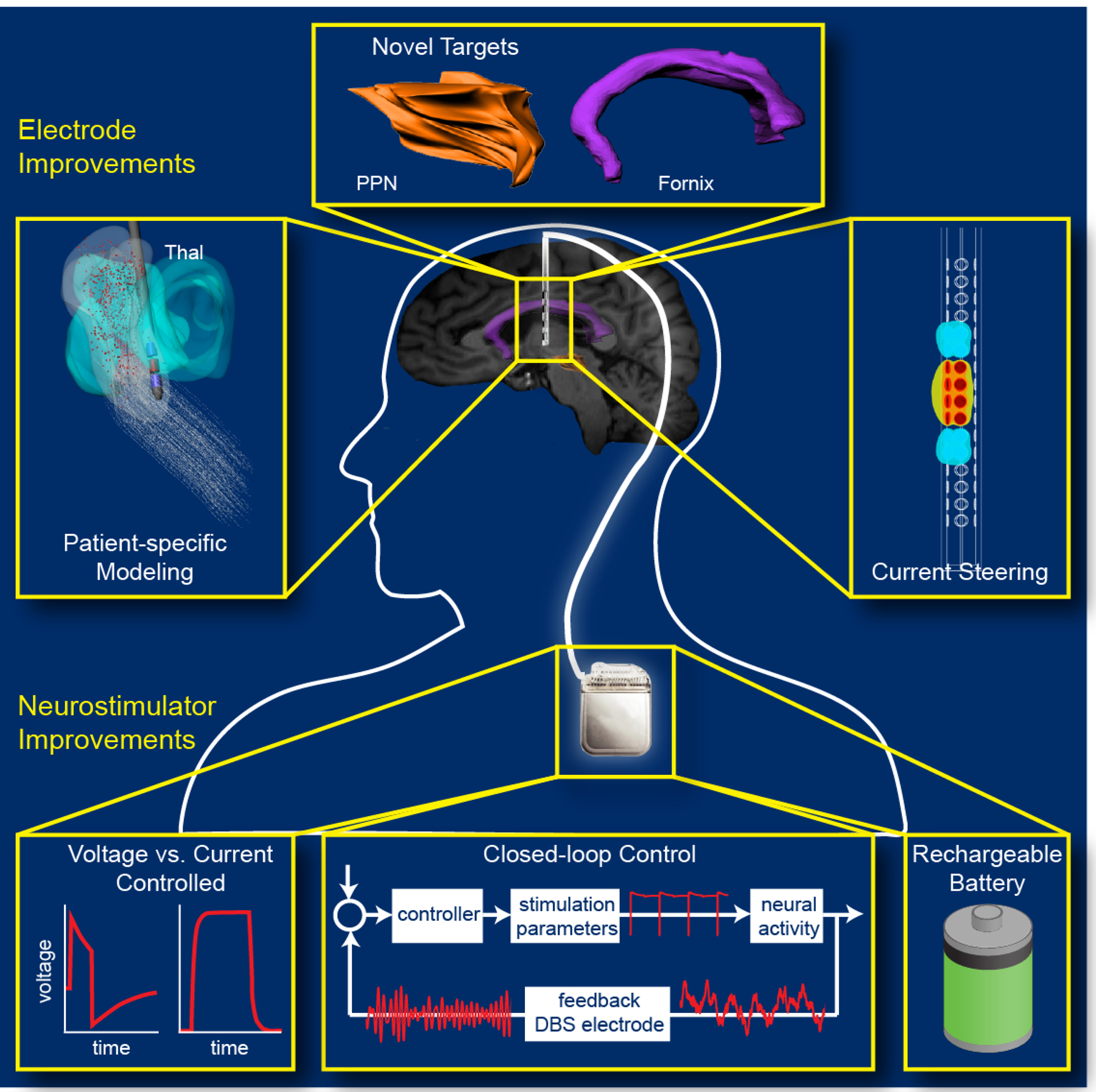
In this paper, we review the current state-of-the-art techniques used for understanding the inner workings of the brain at a systems level. The neural activity that governs our everyday lives involves an intricate coordination of many processes that can be attributed to a variety of brain regions. On the surface, many of these functions can appear to be controlled by specific anatomical structures; however, in reality, numerous dynamic networks within the brain contribute to its function through an interconnected web of neuronal and synaptic pathways. The brain, in its healthy or pathological state, can therefore be best understood by taking a systems-level approach. While numerous neuroengineering technologies exist, we focus here on three major thrusts in the field of systems neuroengineering: neuroimaging, neural interfacing, and neuromodulation. Neuroimaging enables us to delineate the structural and functional organization of the brain, which is key in understanding how the neural system functions in both normal and disease states. Based on such knowledge, devices can be used either to communicate with the neural system, as in neural interface systems, or to modulate brain activity, as in neuromodulation systems. The consideration of these three fields is key to the development and application of neuro-devices. Feedback-based neuro-devices require the ability to sense neural activity (via a neuroimaging modality) through a neural interface (invasive or noninvasive) and ultimately to select a set of stimulation parameters in order to alter neural function via a neuromodulation modality. Systems neuroengineering refers to the use of engineering tools and technologies to image, decode, and modulate the brain in order to comprehend its functions and to repair its dysfunction. Interactions between these fields will help to shape the future of systems neuroengineering-to develop neurotechniques for enhancing the understanding of whole-brain function and dysfunction, and the management of neurological and mental disorders.
Keywords: brain-computer interface; brain-machine interface; neural interface; neural stimulation; neuroimaging; neuromodulation; neurotechnology; systems neuroengineering.
Conflict of interest statement
Brad Edelman, Nessa Johnson, Abbas Sohrabpour, Shanbao Tong, Nitish Thakor, and Bin He declare that they have no conflict of interest or financial conflicts to disclose.
Figures
References
-
- Herman GT. Fundamentals of Computerized Tomography: Image Reconstruction from Projections. London: Springer Science & Business Media, 2009
Grants and funding
LinkOut - more resources
Full Text Sources