

Shifts in Estimated Preferred Directions During Simulated BMI Experiments With No Adaptation
- PMID: 34349626
- PMCID: PMC8326909
- DOI: 10.3389/fnsys.2021.677688
Shifts in Estimated Preferred Directions During Simulated BMI Experiments With No Adaptation
Abstract
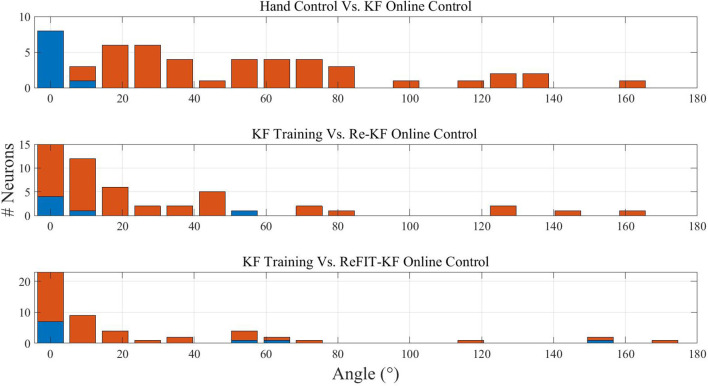
Experiments with brain-machine interfaces (BMIs) reveal that the estimated preferred direction (EPD) of cortical motor units may shift following the transition to brain control. However, the cause of those shifts, and in particular, whether they imply neural adaptation, is an open issue. Here we address this question in simulations and theoretical analysis. Simulations are based on the assumption that the brain implements optimal state estimation and feedback control and that cortical motor neurons encode the estimated state and control vector. Our simulations successfully reproduce apparent shifts in EPDs observed in BMI experiments with different BMI filters, including linear, Kalman and re-calibrated Kalman filters, even with no neural adaptation. Theoretical analysis identifies the conditions for reducing those shifts. We demonstrate that simulations that better satisfy those conditions result in smaller shifts in EPDs. We conclude that the observed shifts in EPDs may result from experimental conditions, and in particular correlated velocities or tuning weights, even with no adaptation. Under the above assumptions, we show that if neurons are tuned differently to the estimated velocity, estimated position and control signal, the EPD with respect to actual velocity may not capture the real PD in which the neuron encodes the estimated velocity. Our investigation provides theoretical and simulation tools for better understanding shifts in EPD and BMI experiments.
Keywords: BMI filter; brain-machine interfaces; neural encoding; neural modulations; preferred direction; shifts in preferred direction.
Copyright © 2021 Benyamini and Zacksenhouse.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures







Similar articles
-
Optimal feedback control successfully explains changes in neural modulations during experiments with brain-machine interfaces.Front Syst Neurosci. 2015 May 19;9:71. doi: 10.3389/fnsys.2015.00071. eCollection 2015. Front Syst Neurosci. 2015. PMID: 26042002 Free PMC article.
-
Unscented Kalman filter for brain-machine interfaces.PLoS One. 2009 Jul 15;4(7):e6243. doi: 10.1371/journal.pone.0006243. PLoS One. 2009. PMID: 19603074 Free PMC article.
-
Tracking the non-stationary neuron tuning by dual Kalman filter for brain machine interfaces decoding.Annu Int Conf IEEE Eng Med Biol Soc. 2008;2008:1720-3. doi: 10.1109/IEMBS.2008.4649508. Annu Int Conf IEEE Eng Med Biol Soc. 2008. PMID: 19163011
-
Strategies for Neural Ensemble Data Analysis for Brain–Machine Interface (BMI) Applications.In: Nicolelis MAL, editor. Methods for Neural Ensemble Recordings. 2nd edition. Boca Raton (FL): CRC Press/Taylor & Francis; 2008. Chapter 4. In: Nicolelis MAL, editor. Methods for Neural Ensemble Recordings. 2nd edition. Boca Raton (FL): CRC Press/Taylor & Francis; 2008. Chapter 4. PMID: 21204438 Free Books & Documents. Review.
-
Self-reorganization of neuronal activation patterns in the cortex under brain-machine interface and neural operant conditioning.Neurosci Res. 2020 Jul;156:279-292. doi: 10.1016/j.neures.2020.03.008. Epub 2020 Mar 31. Neurosci Res. 2020. PMID: 32243900 Review.
References
LinkOut - more resources
Full Text Sources