

Magnetomicrometry
- PMID: 34408095
- PMCID: PMC9553064
- DOI: 10.1126/scirobotics.abg0656
Magnetomicrometry
Abstract
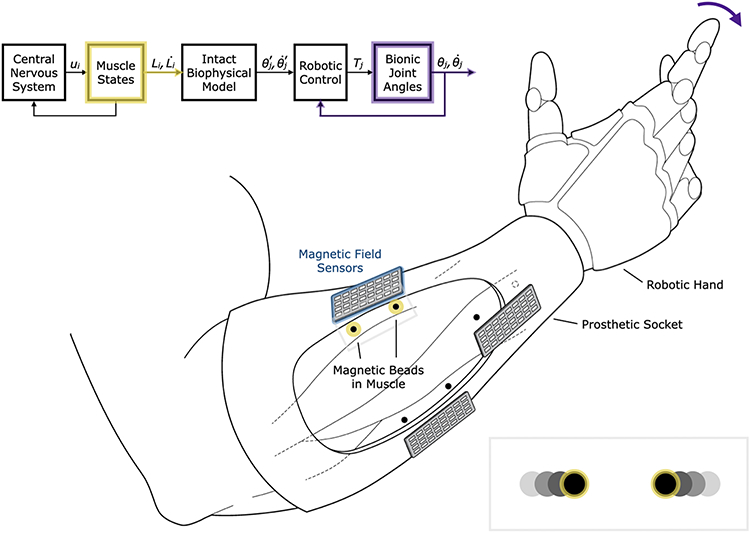
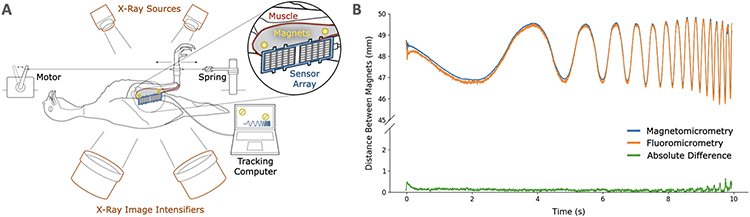
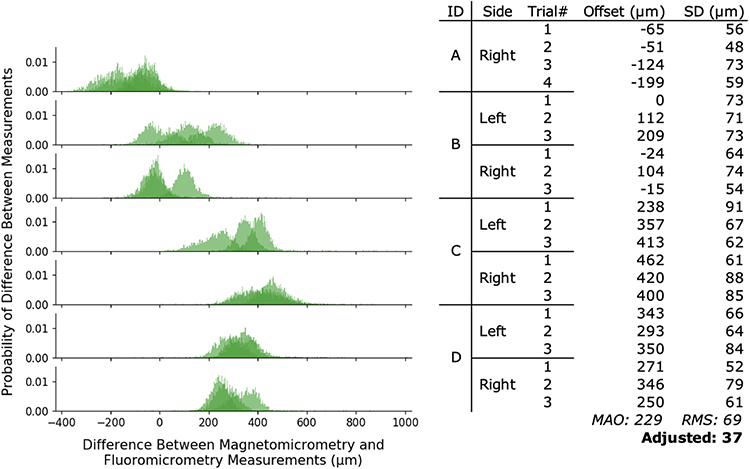
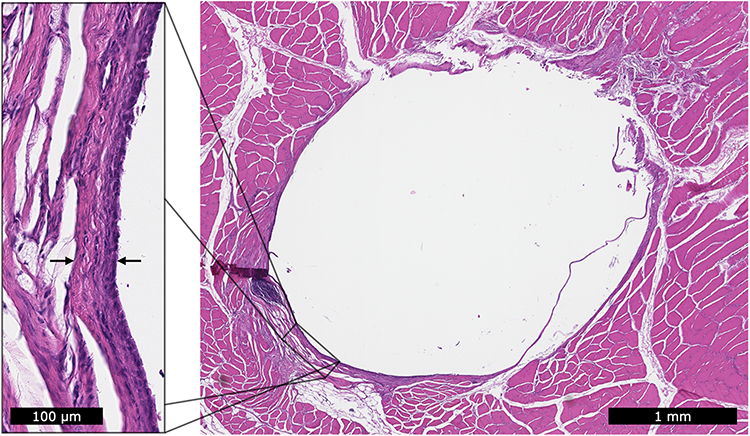
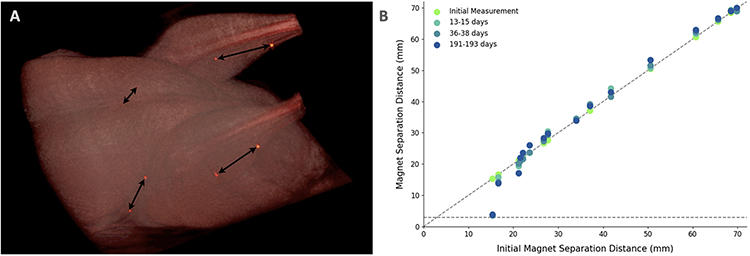
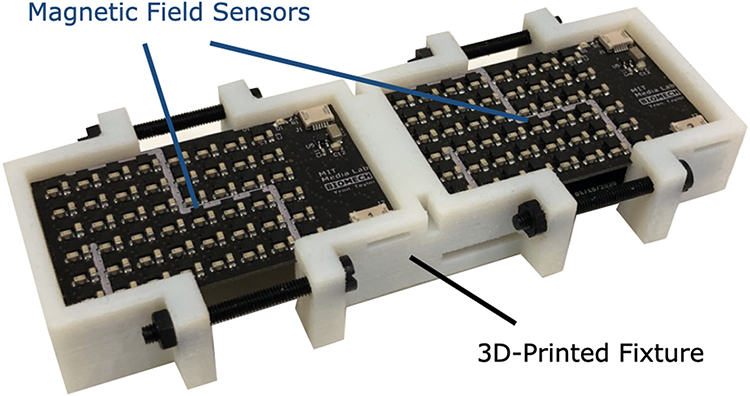
We live in an era of wearable sensing, where our movement through the world can be continuously monitored by devices. Yet, we lack a portable sensor that can continuously monitor muscle, tendon, and bone motion, allowing us to monitor performance, deliver targeted rehabilitation, and provide intuitive, reflexive control over prostheses and exoskeletons. Here, we introduce a sensing modality, magnetomicrometry, that uses the relative positions of implanted magnetic beads to enable wireless tracking of tissue length changes. We demonstrate real-time muscle length tracking in an in vivo turkey model via chronically implanted magnetic beads while investigating accuracy, biocompatibility, and long-term implant stability. We anticipate that this tool will lay the groundwork for volitional control over wearable robots via real-time tracking of muscle lengths and speeds. Further, to inform future biomimetic control strategies, magnetomicrometry may also be used in the in vivo tracking of biological tissues to elucidate biomechanical principles of animal and human movement.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Figures
References
-
- Kung TA, Bueno RA, Alkhalefah GK, Langhals NB, Urbanchek MG, Cederna PS, Innovations in prosthetic interfaces for the upper extremity. Plastic and reconstructive surgery. 132, 1515–1523 (2013). - PubMed
-
- Young A, Kuiken T, Hargrove L, Analysis of using EMG and mechanical sensors to enhance intent recognition in powered lower limb prostheses. Journal of neural engineering. 11, 056021 (2014). - PubMed
-
- Pradhan T, Jung HS, Jang JH, Kim TW, Kang C, Kim JS, Chemical sensing of neurotransmitters. Chemical Society Reviews. 43, 4684–4713 (2014). - PubMed
-
- Cronin NJ, Carty CP, Barrett RS, Lichtwark G, Automatic tracking of medial gastrocnemius fascicle length during human locomotion. Journal of applied physiology. 111, 1491–1496 (2011). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
