

Improved Integrated Robotic Intraocular Snake
- PMID: 34423337
- PMCID: PMC8375417
- DOI: 10.1109/ismr48331.2020.9312927
Improved Integrated Robotic Intraocular Snake
Abstract
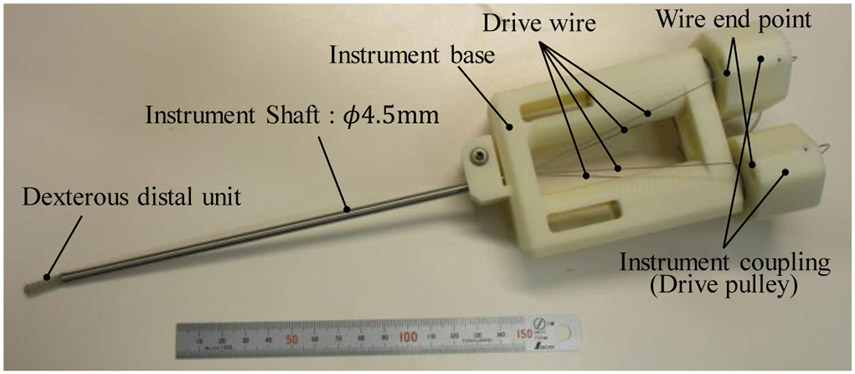
Retinal surgery can be performed only by surgeons possessing advanced surgical skills because of the small, confined intraocular space, and the restricted free motion of instruments in contact with the sclera. Snake-like robots could be essential for use in retinal surgery to overcome this problem. Such robots can approach from suitable directions and operate delicate tissues when performing retinal vein cannulation, epiretinal membrane peeling and so on. In this study, we propose an improved integrated robotic intraocular snake (I2RIS), which is a new version of our previous IRIS. This update focuses on the dexterous distal unit design and the drive unit design. The proposed dexterous distal unit consists of small elements with reduced contact stress. The proposed drive unit includes a new wire drive mechanism where the drive pulley is mounted at a right angle relative to the actuation direction (also, relative to the conventional direction). A geometric analysis and mechanical design show that the proposed drive mechanism is simpler and easier to assemble and yields higher accuracy than the conventional drive mechanism. Furthermore, considering clinical use, the instrument of the I2RIS is detachable from the motor unit for cleaning, sterilization, and attachment of various surgical tools. Weighing merely 31.3 g, the proposed mechanism is only one third of the weight of the conventional IRIS. The basic functions and effectiveness of the proposed mechanism are verified by experiments on 5:1 scaled-up models of the dexterous distal unit and actual-size models of the instrument and motor units.
Keywords: mechanism design; medical robot; microsurgery; retinal surgery.
Figures

















References
-
- Vander Poorten E, Riviere CN, Abbott JJ, Bergeles C, Nasseri MA, Kang JU, Sznitman R, Faridpooya K, and Iordachita I, 36 - Robotic Retinal Surgery, Handbook of Robotic and Image-Guided Surgery, Elsevier, 2019, pp. 627–672.
-
- Jensen PS, Grace KW, Attariwala R, Colgate JE, Glucksberg MR, “Toward robot-assisted vascular in the retina,” Graefe’s Arch Clin Exp Ophthalmol. Vol. 235, no. 11, pp.696–701. November. 1997. - PubMed
-
- Wei W, Popplewell C, Chang S, Fine HF, Simaan N, “Enabling technology for microvascular stenting in ophthalmic surgery,” Journal of Medical Devices, vol. 4, no. 1, March. 2010.
-
- Tanaka S, et al. “Quantitative assessment of manual and robotic microcannulation for eye surgery using new eye model,” hit J Med Robotics Comput Assist Surg, April.2014. - PubMed
-
- Fleming I, Balicki M, Koo J, Iordachita I, Mitchell B, Handa J, Hager G, Taylor R, “Cooperative robot assistant for retinal microsurgery,” Med. Image Comput. Comput. Assist. Interv, vol. 5242. 2008. pp.543–550. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources