

Object Manipulation with an Anthropomorphic Robotic Hand via Deep Reinforcement Learning with a Synergy Space of Natural Hand Poses
- PMID: 34450741
- PMCID: PMC8400557
- DOI: 10.3390/s21165301
Object Manipulation with an Anthropomorphic Robotic Hand via Deep Reinforcement Learning with a Synergy Space of Natural Hand Poses
Abstract
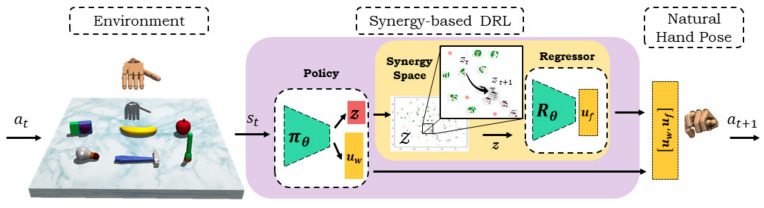
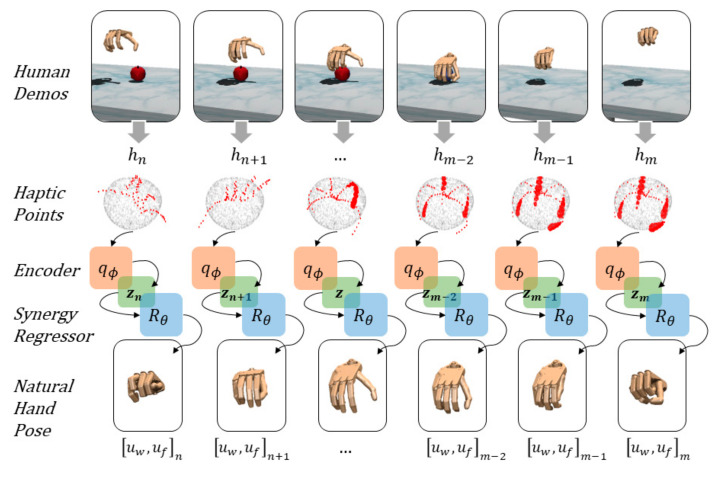
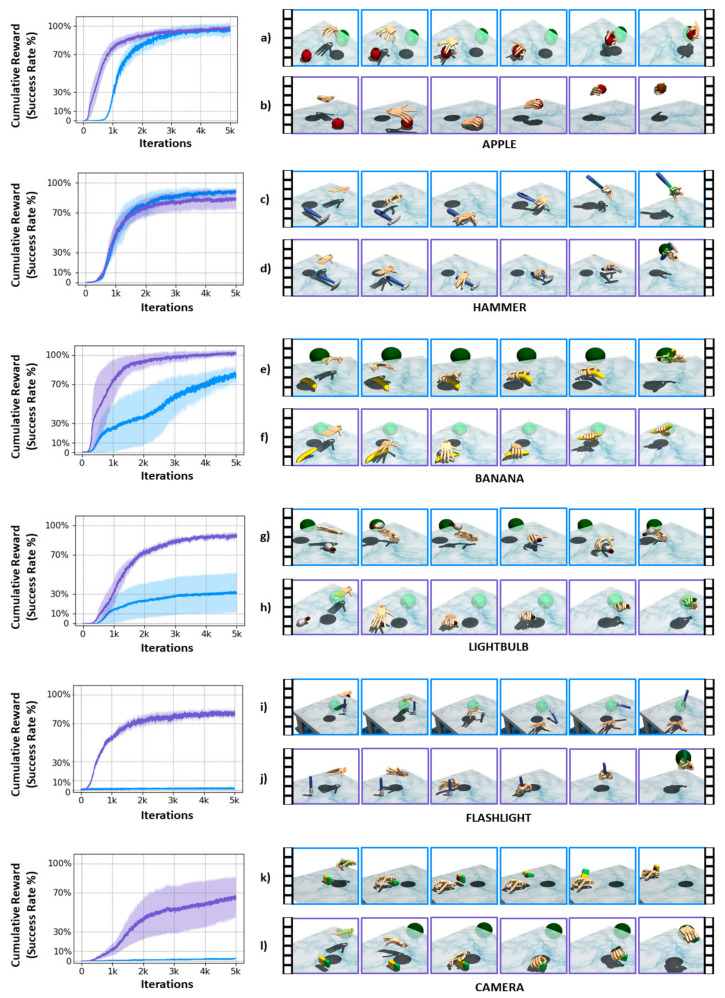
Anthropomorphic robotic hands are designed to attain dexterous movements and flexibility much like human hands. Achieving human-like object manipulation remains a challenge especially due to the control complexity of the anthropomorphic robotic hand with a high degree of freedom. In this work, we propose a deep reinforcement learning (DRL) to train a policy using a synergy space for generating natural grasping and relocation of variously shaped objects using an anthropomorphic robotic hand. A synergy space is created using a continuous normalizing flow network with point clouds of haptic areas, representing natural hand poses obtained from human grasping demonstrations. The DRL policy accesses the synergistic representation and derives natural hand poses through a deep regressor for object grasping and relocation tasks. Our proposed synergy-based DRL achieves an average success rate of 88.38% for the object manipulation tasks, while the standard DRL without synergy space only achieves 50.66%. Qualitative results show the proposed synergy-based DRL policy produces human-like finger placements over the surface of each object including apple, banana, flashlight, camera, lightbulb, and hammer.
Keywords: anthropomorphic robotic hand; deep reinforcement learning; natural hand poses; object grasping; object relocation; synergy space.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Sturm J., Stachniss C., Burgard W. A Probabilistic Framework for Learning Kinematic Models of Articulated Objects. JAIR. 2011;41:477–526. doi: 10.1613/jair.3229. - DOI
-
- Kochan A. Shadow Delivers First Hand. Ind. Robot. 2005;32:15–16. doi: 10.1108/01439910510573237. - DOI
-
- Kumar V., Xu Z., Todorov E. Fast, Strong and Compliant Pneumatic Actuation for Dexterous Tendon-Driven Hands; Proceedings of the 2013 IEEE International Conference on Robotics and Automation; Karlsruhe, Germany. 6–10 May 2013; pp. 1512–1519.
-
- Deimel R., Brock O. A Novel Type of Compliant and Underactuated Robotic Hand for Dexterous Grasping. Int. J. Robot. Res. 2016;35:161–185. doi: 10.1177/0278364915592961. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
