

A Factor-Graph-Based Approach to Vehicle Sideslip Angle Estimation
- PMID: 34450851
- PMCID: PMC8398957
- DOI: 10.3390/s21165409
A Factor-Graph-Based Approach to Vehicle Sideslip Angle Estimation
Abstract
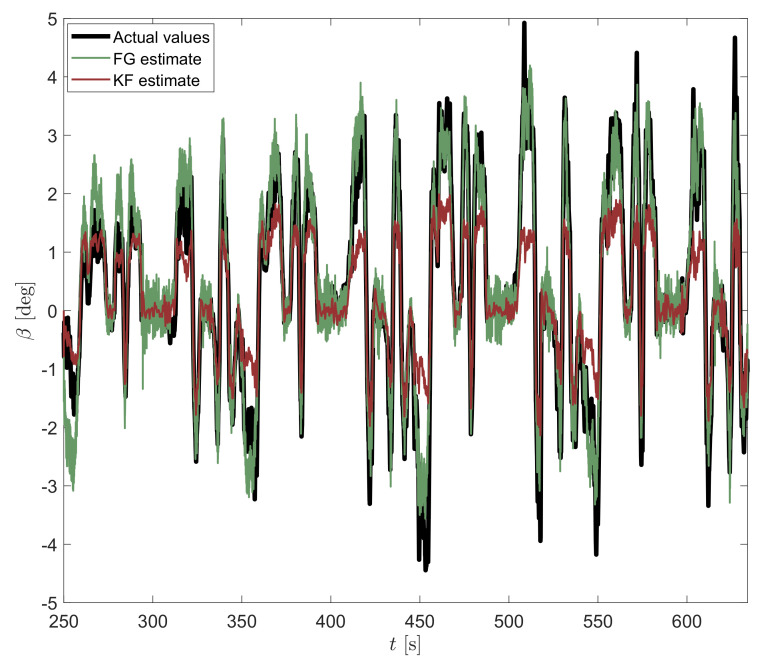
Sideslip angle is an important variable for understanding and monitoring vehicle dynamics, but there is currently no inexpensive method for its direct measurement. Therefore, it is typically estimated from proprioceptive sensors onboard using filtering methods from the family of the Kalman filter. As a novel alternative, this work proposes modeling the problem directly as a graphical model (factor graph), which can then be optimized using a variety of methods, such as whole-dataset batch optimization for offline processing or fixed-lag smoothing for on-line operation. Experimental results on real vehicle datasets validate the proposal, demonstrating a good agreement between estimated and actual sideslip angle, showing similar performance to state-of-the-art methods but with a greater potential for future extensions due to the more flexible mathematical framework. An open-source implementation of the proposed framework has been made available online.
Keywords: Kalman filtering; factor graph; graphical models; sideslip angle estimation; vehicle dynamics estimation.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures










References
-
- Chindamo D., Lenzo B., Gadola M. On the vehicle sideslip angle estimation: A literature review of methods, models, and innovations. Appl. Sci. 2018;8:355. doi: 10.3390/app8030355. - DOI
-
- Tin Leung K., Whidborne J.F., Purdy D., Dunoyer A. A review of ground vehicle dynamic state estimations utilising GPS/INS. Veh. Syst. Dyn. 2011;49:29–58. doi: 10.1080/00423110903406649. - DOI
-
- Caroux J., Lamy C., Basset M., Gissinger G.L. Sideslip angle measurement, experimental characterization and evaluation of three different principles. IFAC Proc. Vol. 2007;40:505–510. doi: 10.3182/20070903-3-FR-2921.00086. - DOI
-
- Manning W., Crolla D. A review of yaw rate and sideslip controllers for passenger vehicles. Trans. Inst. Meas. Control. 2007;29:117–135. doi: 10.1177/0142331207072989. - DOI
-
- Mastinu G., Plöchl M. Road and Off-Road Vehicle System Dynamics Handbook. CRC Press; Boca Raton, FL, USA: 2014.
LinkOut - more resources
Full Text Sources
Research Materials
