

Design and Implementation of a Wireless Medical Robot for Communication Within Hazardous Environments
- PMID: 34462621
- PMCID: PMC8387213
- DOI: 10.1007/s11277-021-08954-7
Design and Implementation of a Wireless Medical Robot for Communication Within Hazardous Environments
Abstract
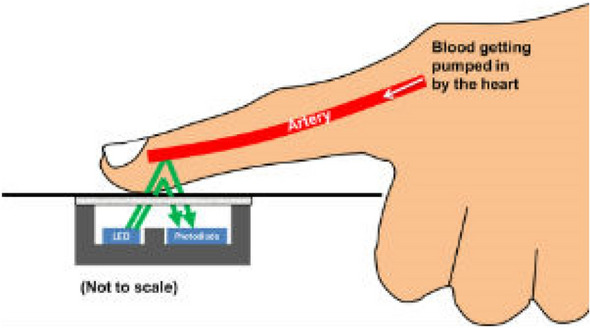
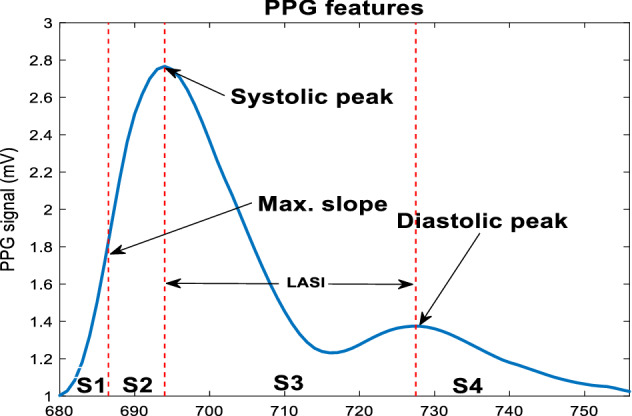
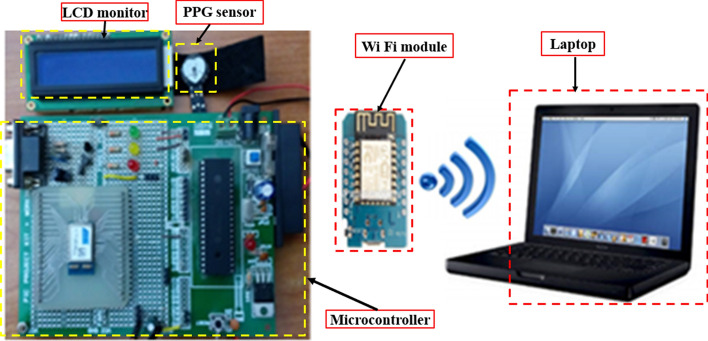
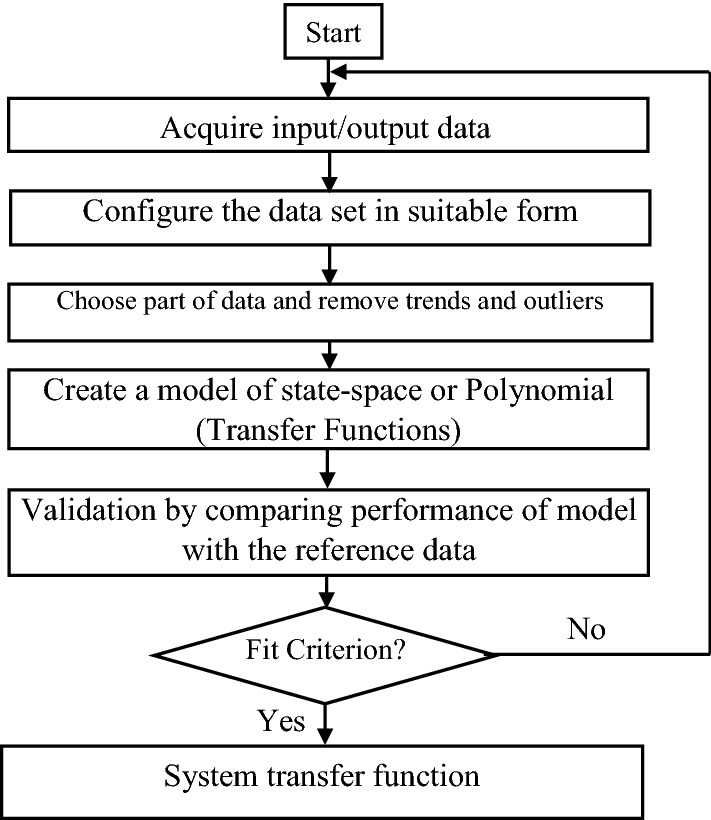
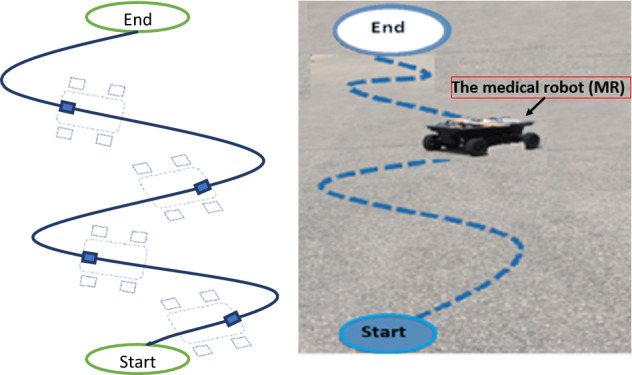
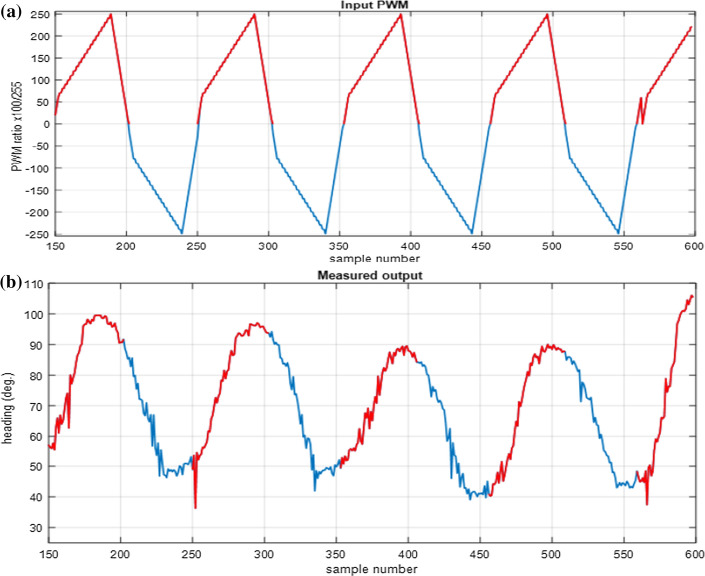
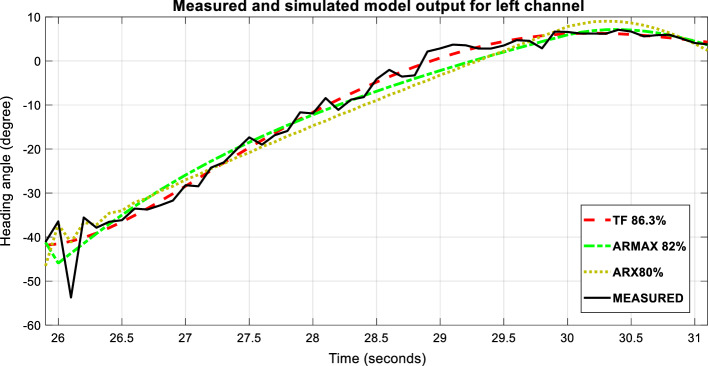
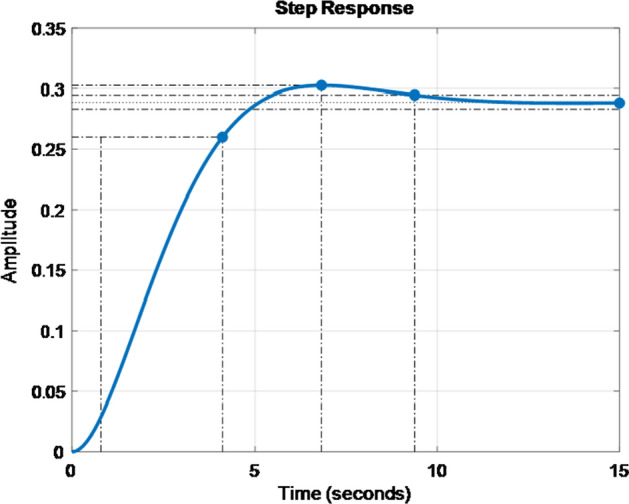
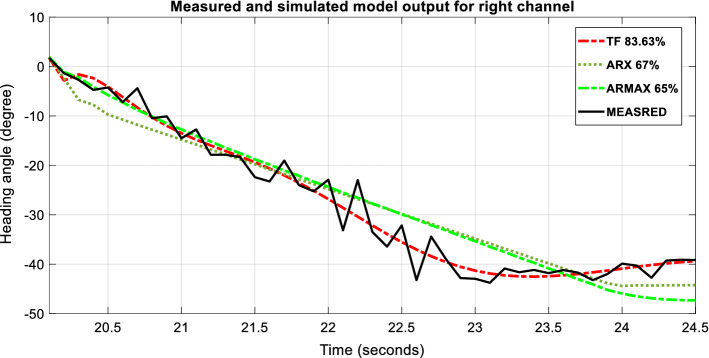
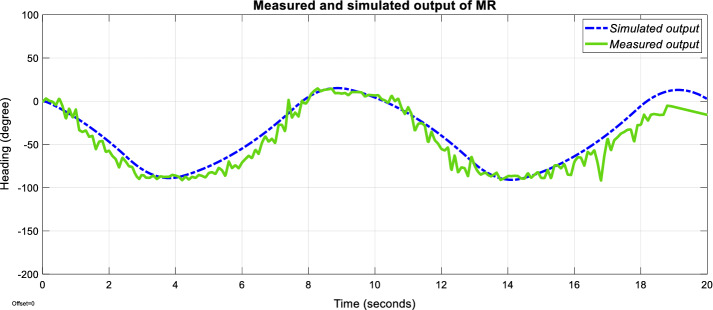
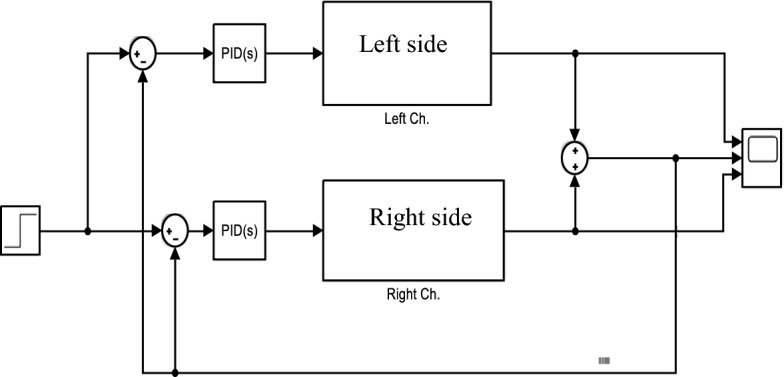
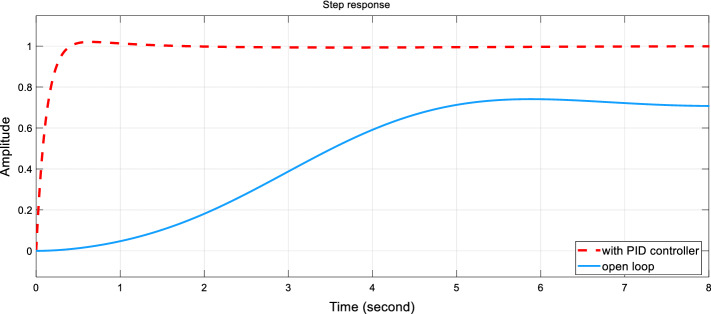
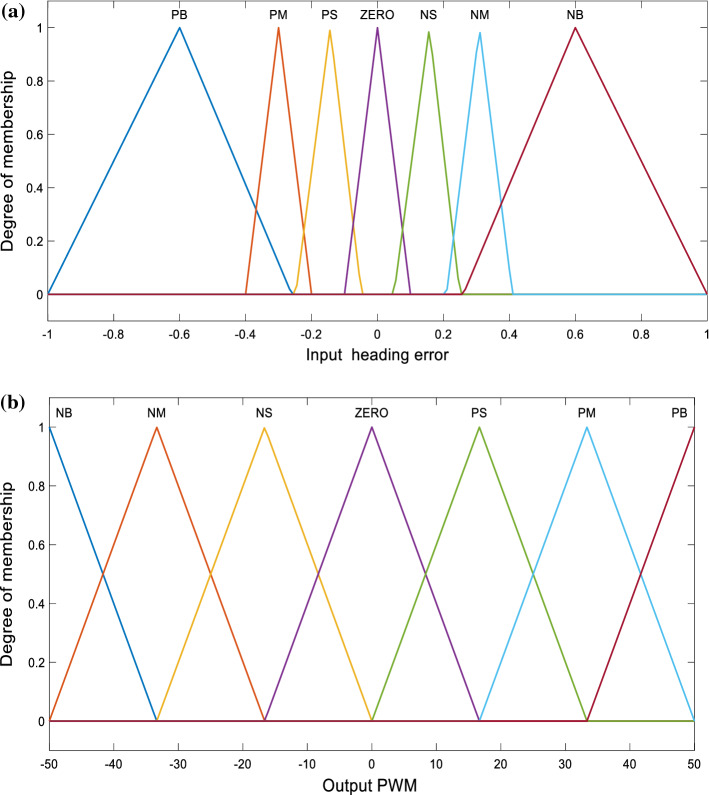
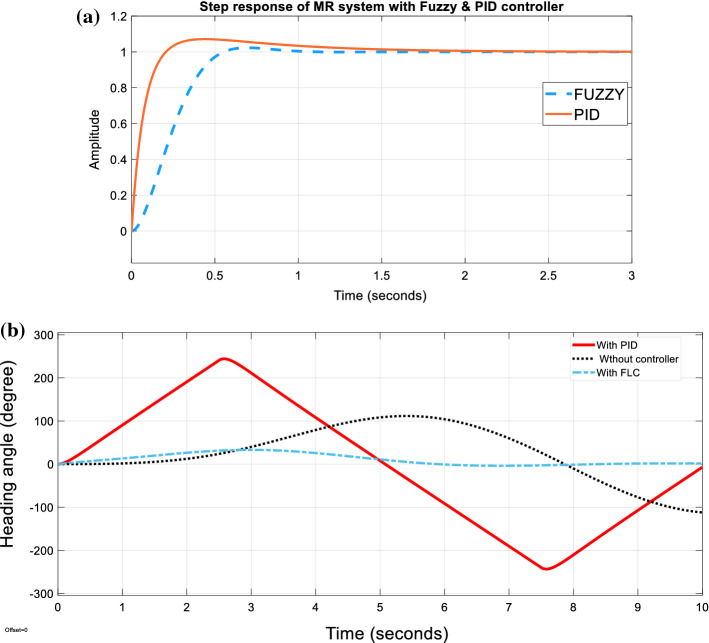
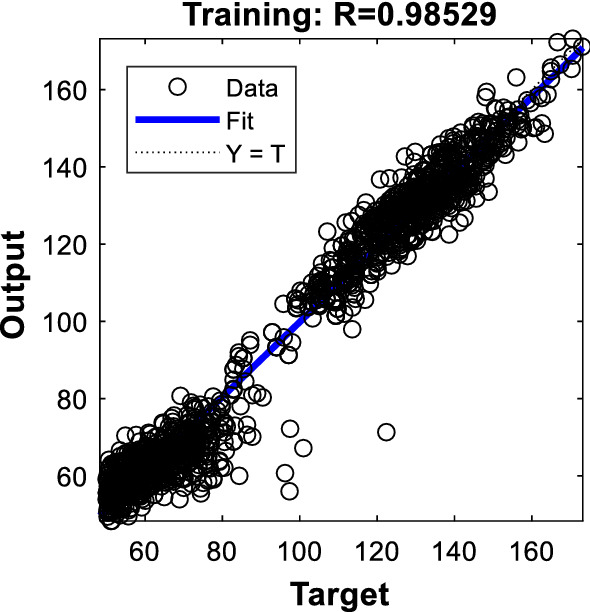
The huge spreading of COVID-19 viral outbreak to several countries motivates many of the research institutions everywhere in numerous disciplines to try decreasing the spread rate of this pandemic. Among these researches are the robotics with different payloads and sensory devices with wireless communications to remotely track patients' diagnosis and their treatment. That is, it reduces direct contact between the patients and the medical team members. Thus, this paper is devoted to design and implement a prototype of wireless medical robot (MR) that can communicate between patients and medical consultants. The prototype includes the modelling of a four-wheeled MR using systems' identification methodology, from which the model is utilized in control design and analysis. The required controller is designed using the proportional-integral-derivative (PID) and Fuzzy logic (FLC) techniques. The MR is equipped onboard with some medical sensors and a camera to acquire vital signs and physical parameters of patients. The MR model is obtained via an experimental test with input/output signals in open-loop configuration as single-input-single-output from which the estimation and validation results demonstrate that the identified model possess about 89% of the output variation/dynamics. This model is used for controllers' design with PID and FLC, the response of which is good for heading angle tracking. Concerning the medical measurements, more than two thousand real recorded Photo-plethysmography (PPG) signals and Blood Pressure (BP) are used to find the appropriate BP estimation model. Towards this objective, some experiments are designed and conducted to measure the PPG signal. Finally, the BP is estimated with mean absolute error of about 4.7 mmHg in systolic and 4.8 mmHg in diastolic using Artificial Neural Network.
Keywords: Heading angle tracking; Infection guard; Telemedicine; Wireless communications.
© The Author(s), under exclusive licence to Springer Science+Business Media, LLC, part of Springer Nature 2021.
Conflict of interest statement
Conflict of interestThe authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures



References
-
- Riek LD. Healthcare robotics. Communications of the ACM. 2017;60(11):68–78. doi: 10.1145/3127874. - DOI
-
- Czartoski, T. (n.d.). Commentary: Telehealth holds promise, but human touch still needed. Retrieved from https://digitalcommons.psjhealth.org/publications
-
- Söderström T. A user perspective on errors-in-variables methods in system identification. Control Engineering Practice. 2019;89:56–69. doi: 10.1016/j.conengprac.2019.05.013. - DOI
-
- Åström KJ, Eykhoff P. System identification-a survey. Automatica. 1971;7(2):123–162. doi: 10.1016/0005-1098(71)90059-8. - DOI
-
- Rañó I, Iglesias R. Application of systems identification to the implementation of motion camouflage in mobile robots. Autonomous Robots. 2016;40(2):229–244. doi: 10.1007/s10514-015-9449-9. - DOI
LinkOut - more resources
Full Text Sources