

A learning-based tip contact force estimation method for tendon-driven continuum manipulator
- PMID: 34471214
- PMCID: PMC8410791
- DOI: 10.1038/s41598-021-97003-1
A learning-based tip contact force estimation method for tendon-driven continuum manipulator
Abstract
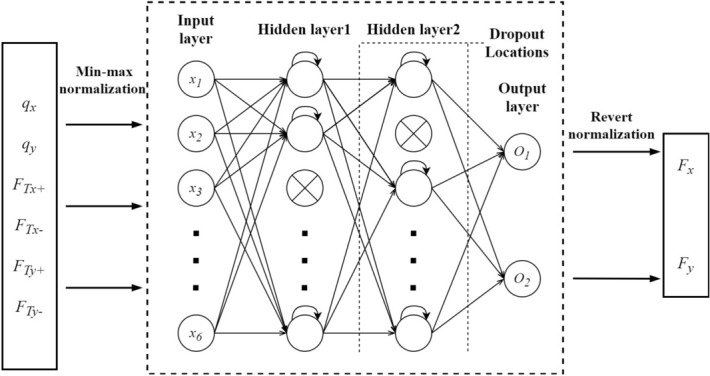
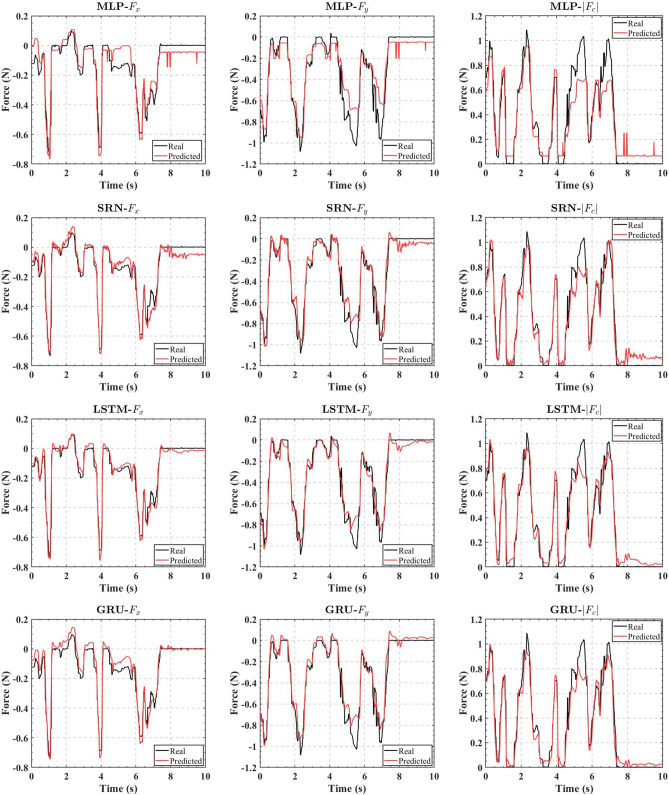
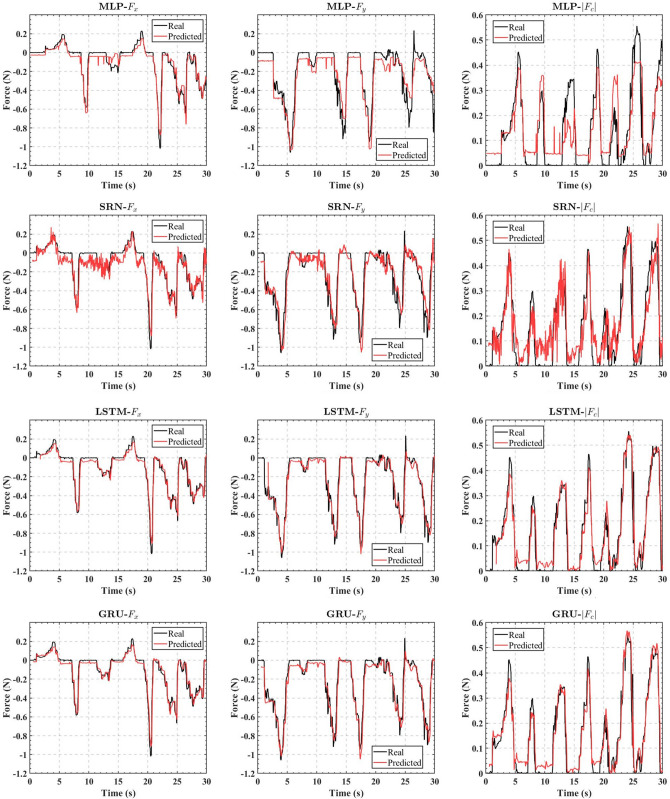
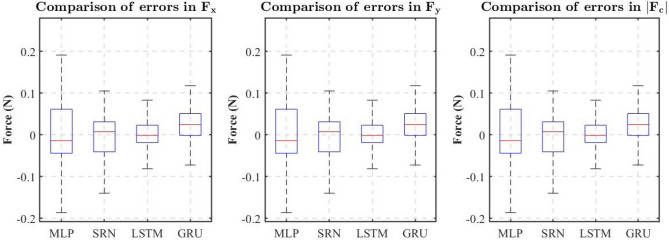
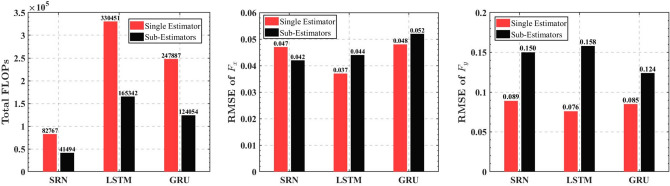
Although tendon-driven continuum manipulators have been extensively researched, how to realize tip contact force sensing in a more general and efficient way without increasing the diameter is still a challenge. Rather than use a complex modeling approach, this paper proposes a general tip contact force-sensing method based on a recurrent neural network that takes the tendons' position and tension as the input of a recurrent neural network and the tip contact force of the continuum manipulator as the output and fits this static model by means of machine learning so that it may be used as a real-time contact force estimator. We also designed and built a corresponding three-degree-of-freedom contact force data acquisition platform based on the structure of a continuum manipulator designed in our previous studies. After obtaining training data, we built and compared the performances of a multi-layer perceptron-based contact force estimator as a baseline and three typical recurrent neural network-based contact force estimators through TensorFlow framework to verify the feasibility of this method. We also proposed a manually decoupled sub-estimators algorithm and evaluated the advantages and disadvantages of those two methods.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Liu S, et al. Development of a dexterous continuum manipulator for exploration and inspection in confined spaces. Ind. Robot Int. J. 2016;43:284–295. doi: 10.1108/IR-07-2015-0142. - DOI
-
- Wooten, M., Frazelle, C., Walker, I. D., Kapadia, A. & Lee, J. H. Exploration and inspection with vine-inspired continuum robots. In 2018 IEEE International Conference on Robotics and Automation (ICRA), 5526–5533, 10.1109/ICRA.2018.8461132 (2018).
-
- Hong W, et al. Development of a novel continuum robotic system for maxillary sinus surgery. IEEE/ASME Trans. Mechatron. 2018;23:1226–1237. doi: 10.1109/TMECH.2018.2818442. - DOI
-
- Kiang CT, Spowage A, Yoong CK. Review of control and sensor system of flexible manipulator. J. Intell. Robot. Syst. 2015;77:187–213. doi: 10.1007/s10846-014-0071-4. - DOI
Publication types
LinkOut - more resources
Full Text Sources
