

A Hierarchical View Pooling Network for Multichannel Surface Electromyography-Based Gesture Recognition
- PMID: 34484323
- PMCID: PMC8413066
- DOI: 10.1155/2021/6591035
A Hierarchical View Pooling Network for Multichannel Surface Electromyography-Based Gesture Recognition
Abstract
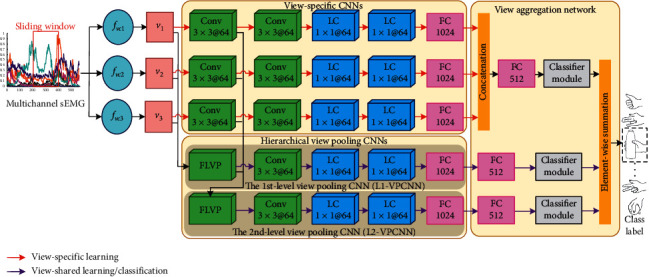
Hand gesture recognition based on surface electromyography (sEMG) plays an important role in the field of biomedical and rehabilitation engineering. Recently, there is a remarkable progress in gesture recognition using high-density surface electromyography (HD-sEMG) recorded by sensor arrays. On the other hand, robust gesture recognition using multichannel sEMG recorded by sparsely placed sensors remains a major challenge. In the context of multiview deep learning, this paper presents a hierarchical view pooling network (HVPN) framework, which improves multichannel sEMG-based gesture recognition by learning not only view-specific deep features but also view-shared deep features from hierarchically pooled multiview feature spaces. Extensive intrasubject and intersubject evaluations were conducted on the large-scale noninvasive adaptive prosthetics (NinaPro) database to comprehensively evaluate our proposed HVPN framework. Results showed that when using 200 ms sliding windows to segment data, the proposed HVPN framework could achieve the intrasubject gesture recognition accuracy of 88.4%, 85.8%, 68.2%, 72.9%, and 90.3% and the intersubject gesture recognition accuracy of 84.9%, 82.0%, 65.6%, 70.2%, and 88.9% on the first five subdatabases of NinaPro, respectively, which outperformed the state-of-the-art methods.
Copyright © 2021 Wentao Wei et al.
Conflict of interest statement
The authors declare that there are no conflicts of interest regarding the publication of this paper.
Figures
References
-
- Li C., Li G., Jiang G., Chen D., Liu H. Surface EMG data aggregation processing for intelligent prosthetic action recognition. Neural Computing and Applications. 2018;32(22):16795–16806. doi: 10.1007/s00521-018-3909-z. - DOI
-
- Shi G., Xu G., Wang H., Duan N., Zhang S. Fuzzy-adaptive impedance control of upper limb rehabilitation robot based on sEMG. Proceedings of International Conference on Ubiquitous Robots; June 2019; Jeju, Korea. pp. 745–749. - DOI
-
- Ma R., Zhang L., Li G., Jiang D., Xu S., Chen D. Grasping force prediction based on sEMG signals. Alexandria Engineering Journal. 2020;59(3):1135–1147. doi: 10.1016/j.aej.2020.01.007. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
