

Fast tuning of posture control by visual feedback underlies gaze stabilization in walking Drosophila
- PMID: 34499851
- PMCID: PMC8556163
- DOI: 10.1016/j.cub.2021.08.041
Fast tuning of posture control by visual feedback underlies gaze stabilization in walking Drosophila
Abstract
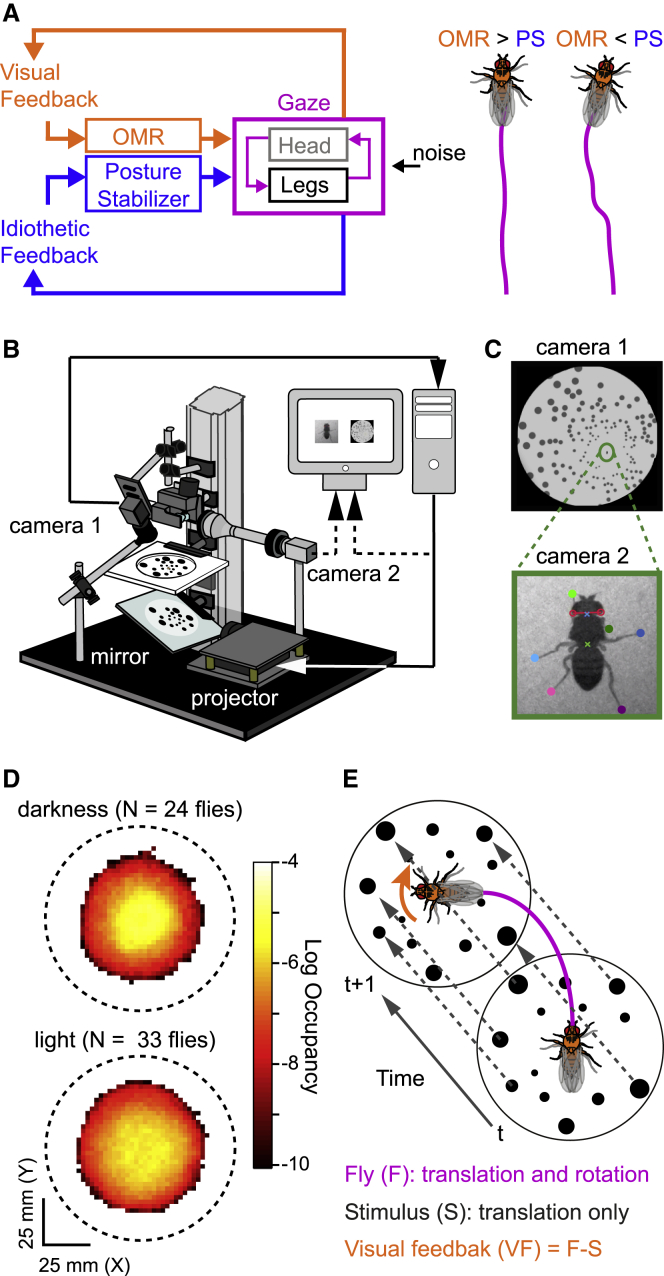
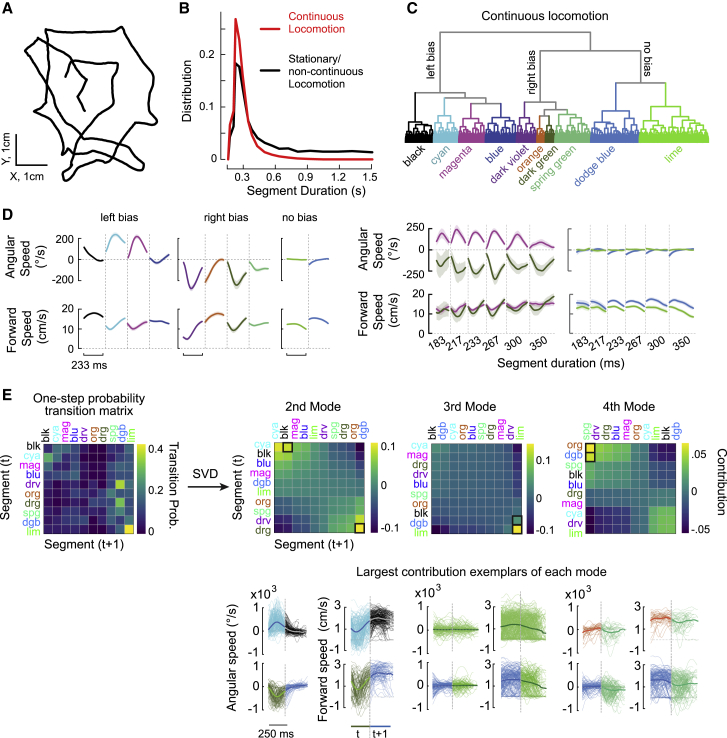
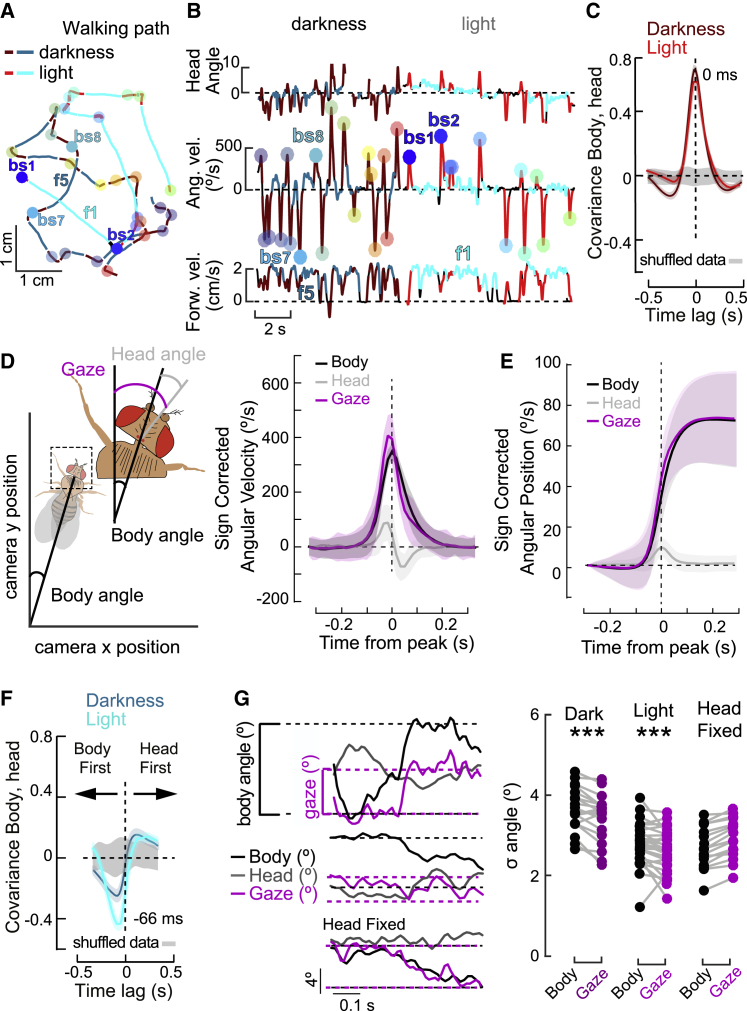
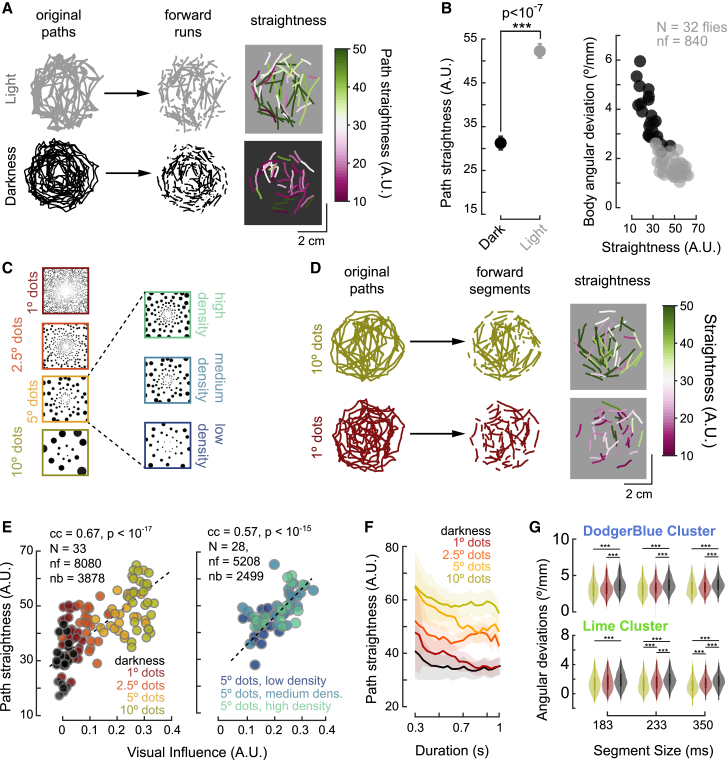
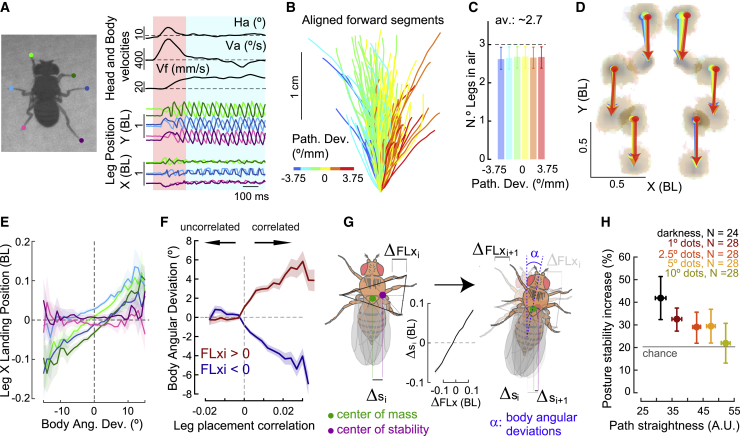
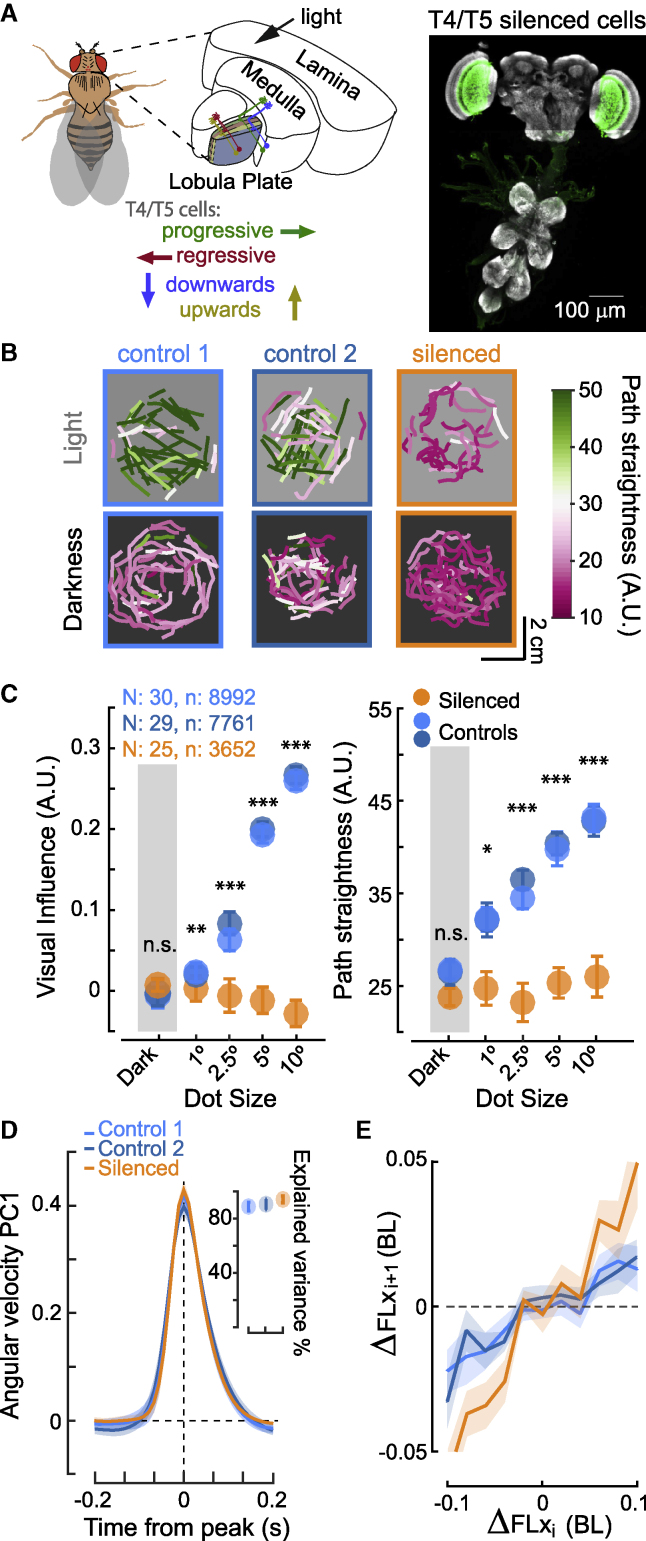
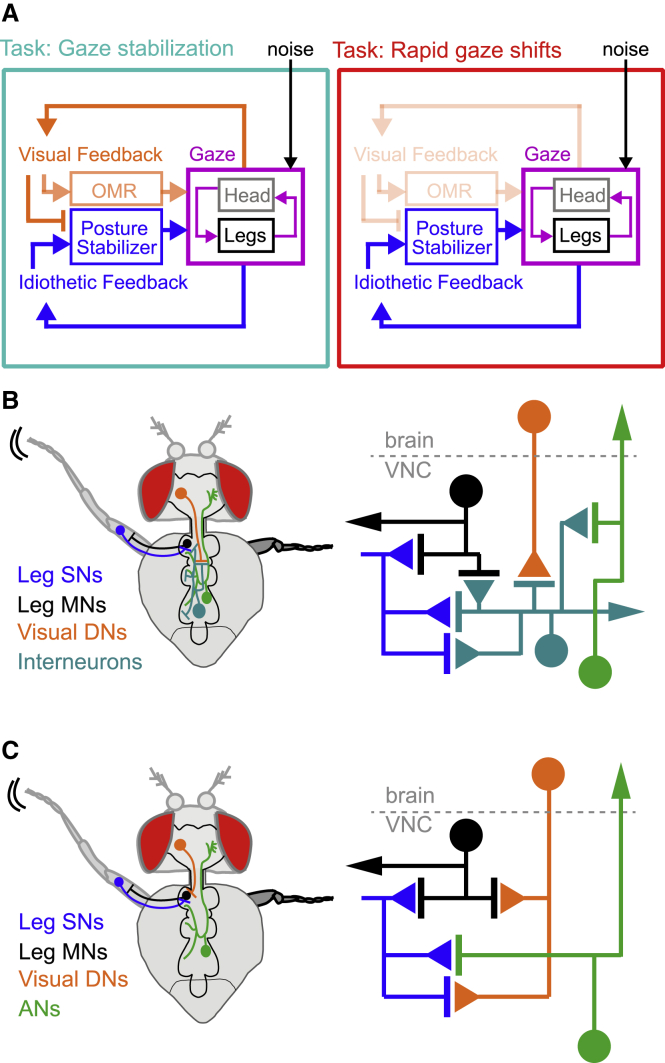
Locomotion requires a balance between mechanical stability and movement flexibility to achieve behavioral goals despite noisy neuromuscular systems, but rarely is it considered how this balance is orchestrated. We combined virtual reality tools with quantitative analysis of behavior to examine how Drosophila uses self-generated visual information (reafferent visual feedback) to control gaze during exploratory walking. We found that flies execute distinct motor programs coordinated across the body to maximize gaze stability. However, the presence of inherent variability in leg placement relative to the body jeopardizes fine control of gaze due to posture-stabilizing adjustments that lead to unintended changes in course direction. Surprisingly, whereas visual feedback is dispensable for head-body coordination, we found that self-generated visual signals tune postural reflexes to rapidly prevent turns rather than to promote compensatory rotations, a long-standing idea for visually guided course control. Together, these findings support a model in which visual feedback orchestrates the interplay between posture and gaze stability in a manner that is both goal dependent and motor-context specific.
Keywords: Drosophila; gaze stabilization; interlimb coordination; locomotion; motor control; posture control; virtual reality; visually guided walking; visuomotor processing.
Copyright © 2021 The Authors. Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests M.E.C. is an advisory board member at Current Biology.
Figures

Comment in
-
Insect locomotion: Flies show you how to stay on course.Curr Biol. 2021 Oct 25;31(20):R1395-R1397. doi: 10.1016/j.cub.2021.09.015. Curr Biol. 2021. PMID: 34699806
References
-
- Dickinson M.H., Farley C.T., Full R.J., Koehl M.A., Kram R., Lehman S. How animals move: an integrative view. Science. 2000;288:100–106. - PubMed
-
- Bernstein N. Pergamon; 1967. The Coordination and Regulation of Movements.
-
- Haith A.M., Krakauer J.W. In: Gollhofer A., Taube W., Nielsen J.B., editors. Routledge; 2012. Theoretical models of motor control and motor learning; pp. 7–28. (Routledge Handbook of Motor Control and Motor Learning).
-
- Scott S.H. Optimal feedback control and the neural basis of volitional motor control. Nat. Rev. Neurosci. 2004;5:532–546. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
