

Simulation experiment to test strategies of geomagnetic navigation during long-distance bird migration
- PMID: 34526152
- PMCID: PMC8442449
- DOI: 10.1186/s40462-021-00283-5
Simulation experiment to test strategies of geomagnetic navigation during long-distance bird migration
Abstract
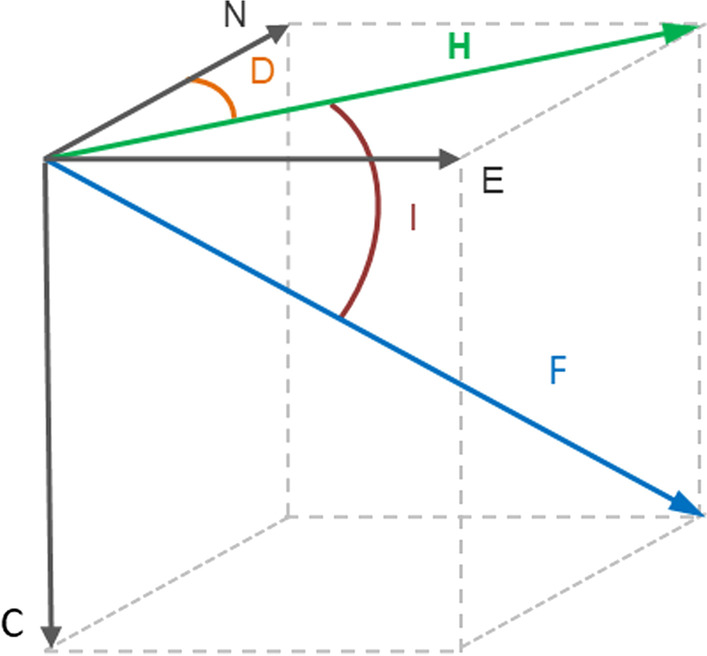
Background: Different theories suggest birds may use compass or map navigational systems associated with Earth's magnetic intensity or inclination, especially during migratory flights. These theories have only been tested by considering properties of the Earth's magnetic field at coarse temporal scales, typically ignoring the temporal dynamics of geomagnetic values that may affect migratory navigational capacity.
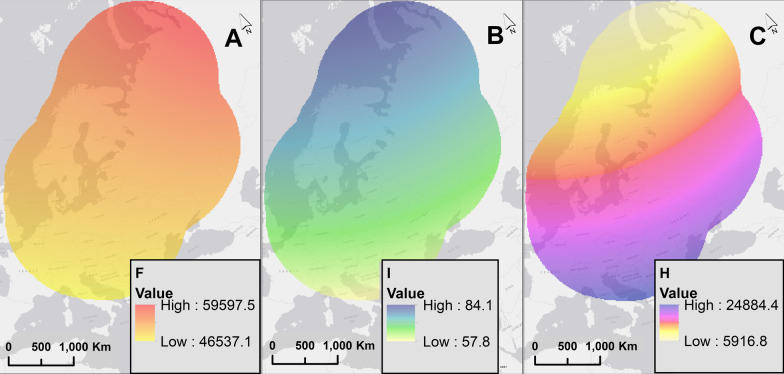
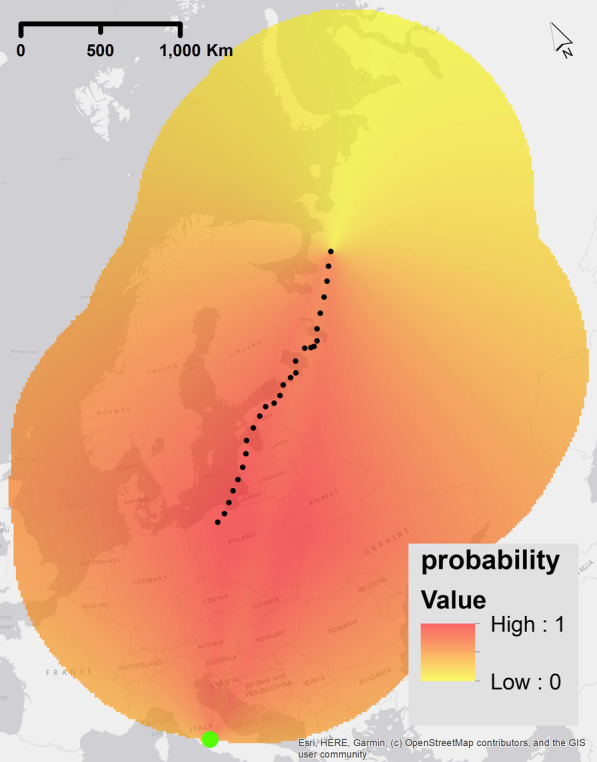
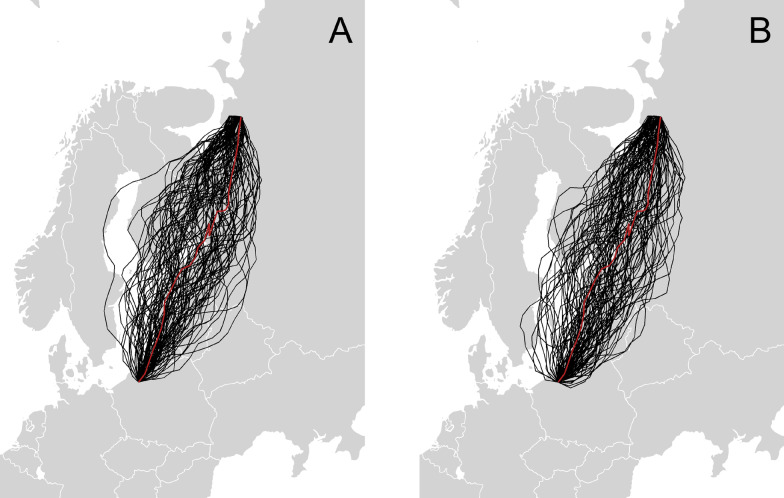
Methods: We designed a simulation experiment to study if and how birds use the geomagnetic field during migration by using both high resolution GPS tracking data and geomagnetic data at relatively fine spatial and temporal resolutions in comparison to previous studies. Our simulations use correlated random walks (CRW) and correlated random bridge (CRB) models to model different navigational strategies based on underlying dynamic geomagnetic data. We translated navigational strategies associated with geomagnetic cues into probability surfaces that are included in the random walk models. Simulated trajectories from these models were compared to the actual GPS trajectories of migratory birds using 3 different similarity measurements to evaluate which of the strategies was most likely to have occurred.
Results and conclusion: We designed a simulation experiment which can be applied to different wildlife species under varying conditions worldwide. In the case of our example species, we found that a compass-type strategy based on taxis, defined as movement towards an extreme value, produced the closest and most similar trajectories when compared to original GPS tracking data in CRW models. Our results indicate less evidence for map navigation (constant heading and bi-gradient taxis navigation). Additionally, our results indicate a multifactorial navigational mechanism necessitating more than one cue for successful navigation to the target. This is apparent from our simulations because the modelled endpoints of the trajectories of the CRW models do not reach close proximity to the target location of the GPS trajectory when simulated with geomagnetic navigational strategies alone. Additionally, the magnitude of the effect of the geomagnetic cues during navigation in our models was low in our CRB models. More research on the scale effects of the geomagnetic field on navigation, along with temporally varying geomagnetic data could be useful for further improving future models.
Keywords: Bird migration; Earth’s magnetic field; Geomagnetic navigation; Greater white-fronted geese; Method development; Navigational strategies; Random walk models.
© 2021. The Author(s).
Conflict of interest statement
The authors declare that they have no competing interests.
Figures





References
-
- Tryjanowski P, Sparks TH, Kuźniak S. Earlier arrival date of some farm land migrants in western Poland. IBIS (Lond 1859) 2002;144:62–68. doi: 10.1046/j.0019-1019.2001.00022.x. - DOI
-
- Mouritsen H. Magnetoreception in birds and its use for long-distance migration. In: Sturkie’s avian physiology. 2015. p. 113–33. http://www.qut.eblib.com.au/patron/FullRecord.aspx?p=763630
Grants and funding
LinkOut - more resources
Full Text Sources
