

An Extended Modular Processing Pipeline for Event-Based Vision in Automatic Visual Inspection
- PMID: 34577349
- PMCID: PMC8472878
- DOI: 10.3390/s21186143
An Extended Modular Processing Pipeline for Event-Based Vision in Automatic Visual Inspection
Abstract
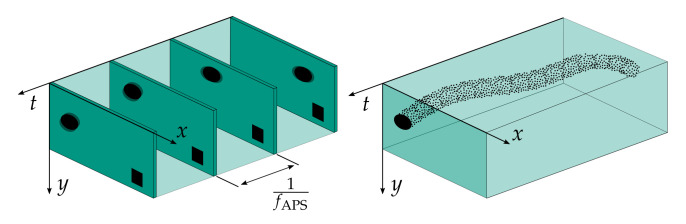
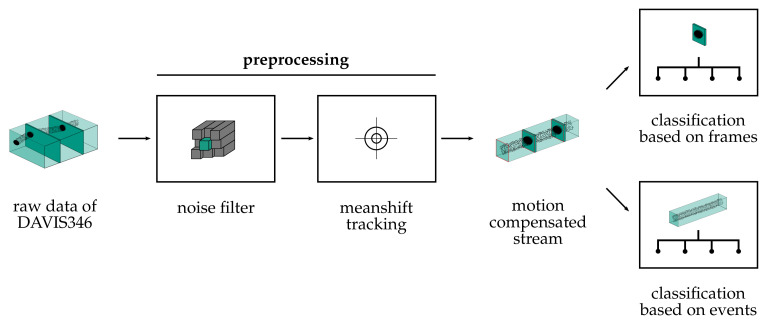
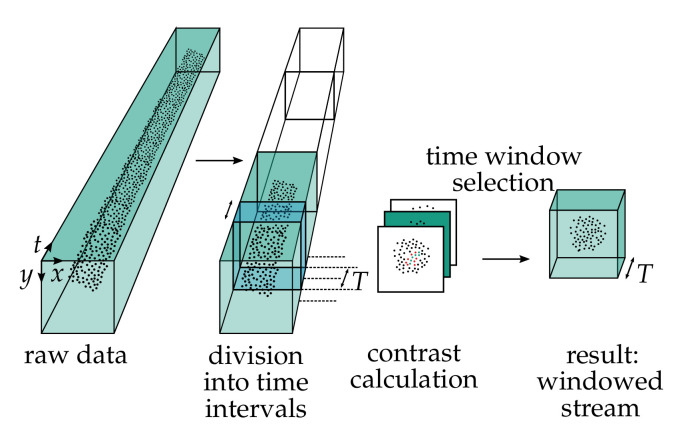
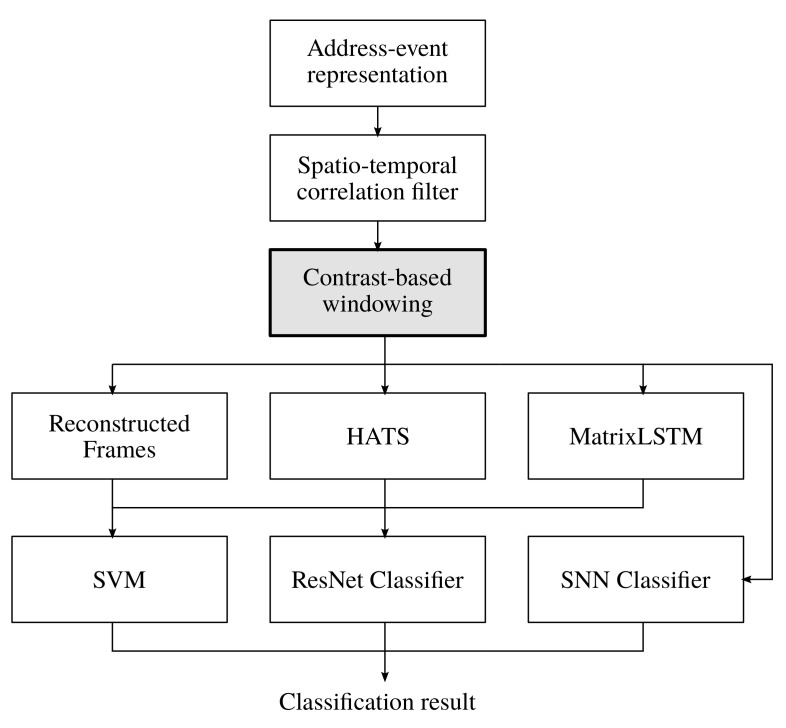
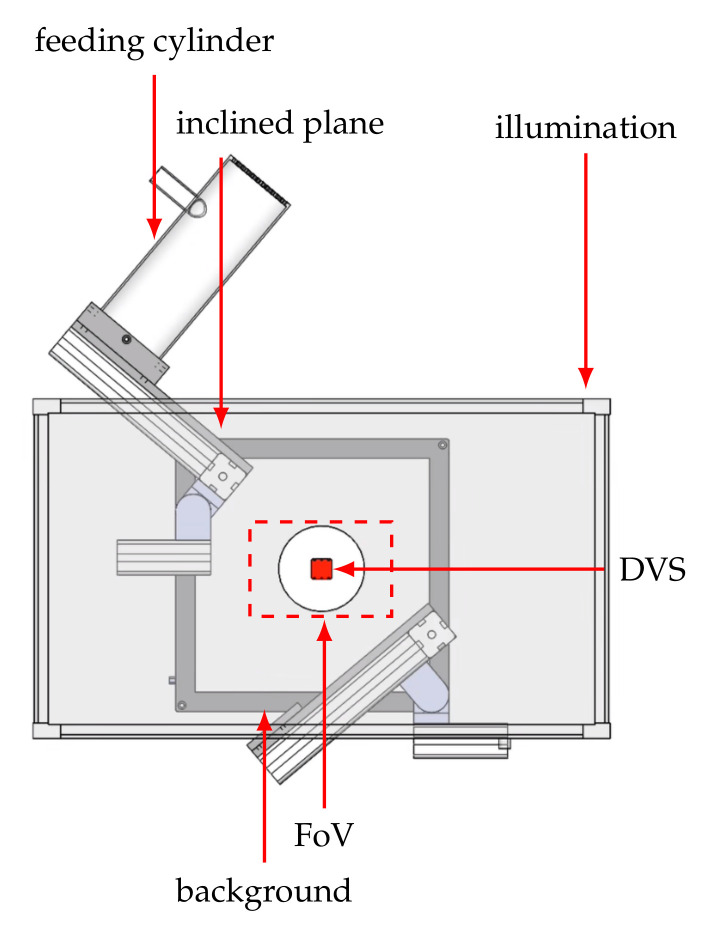
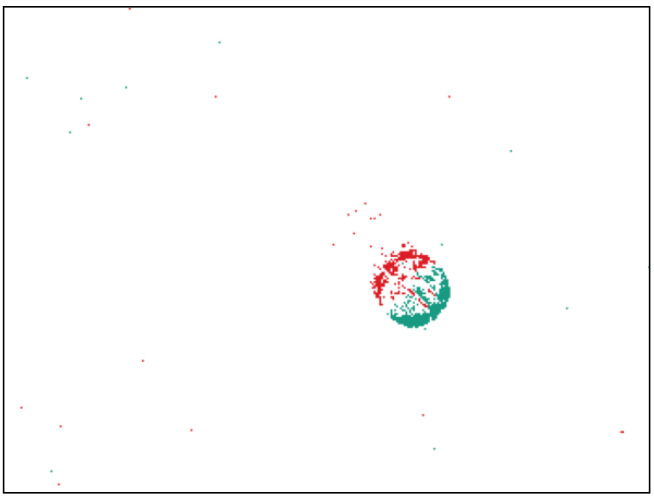
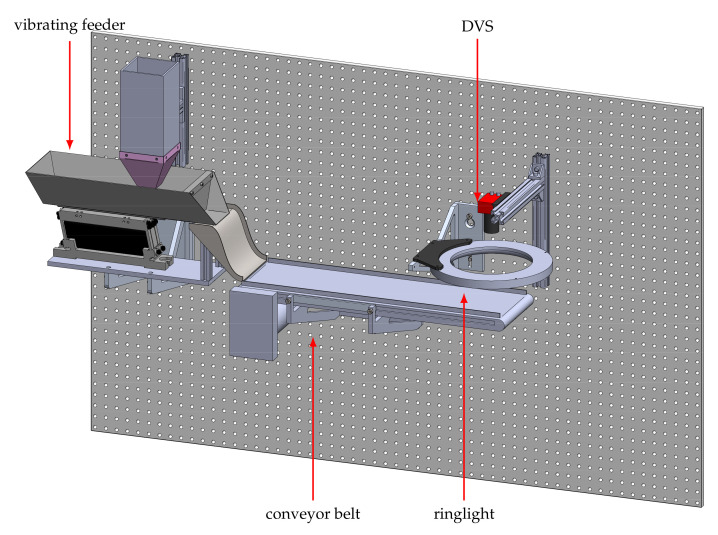
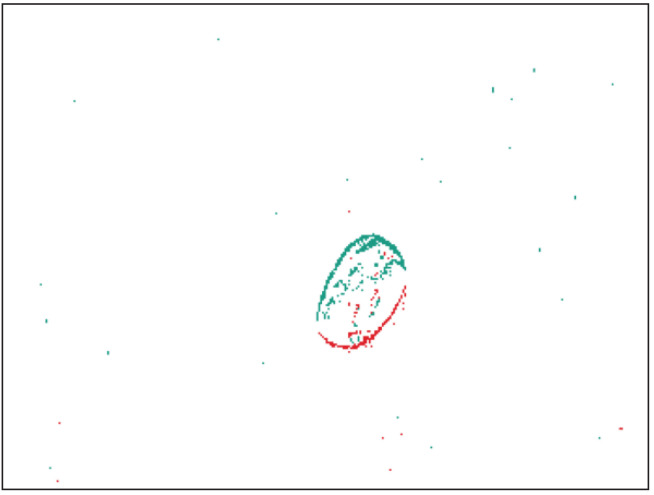
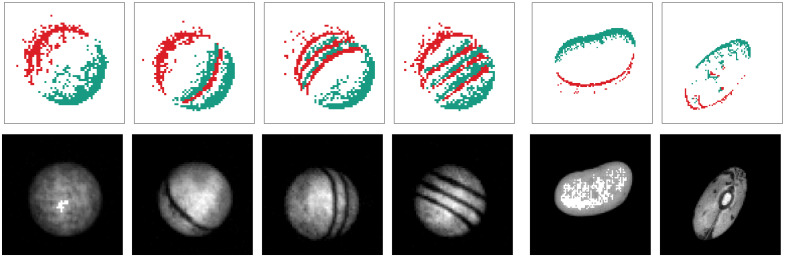
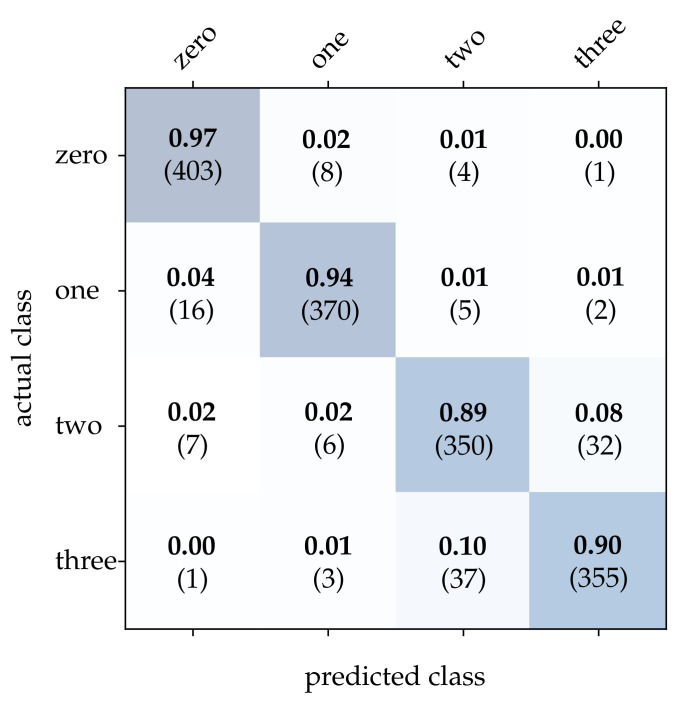
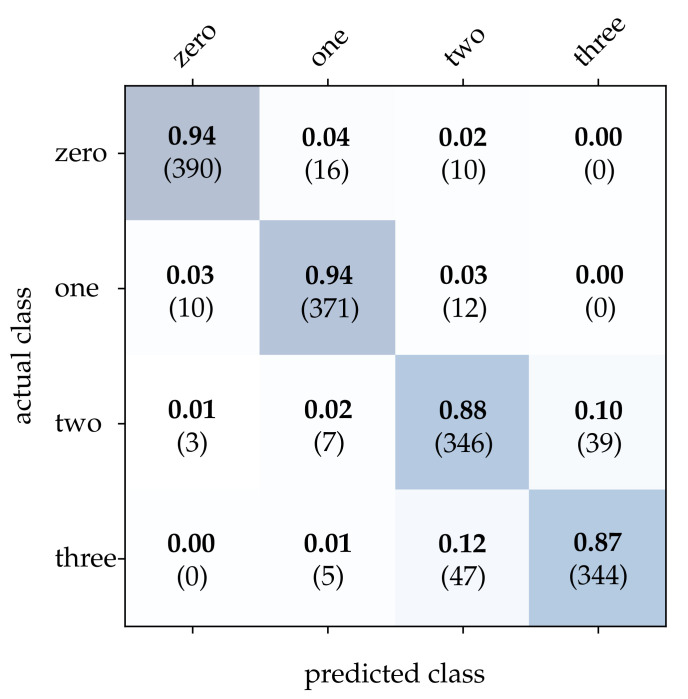
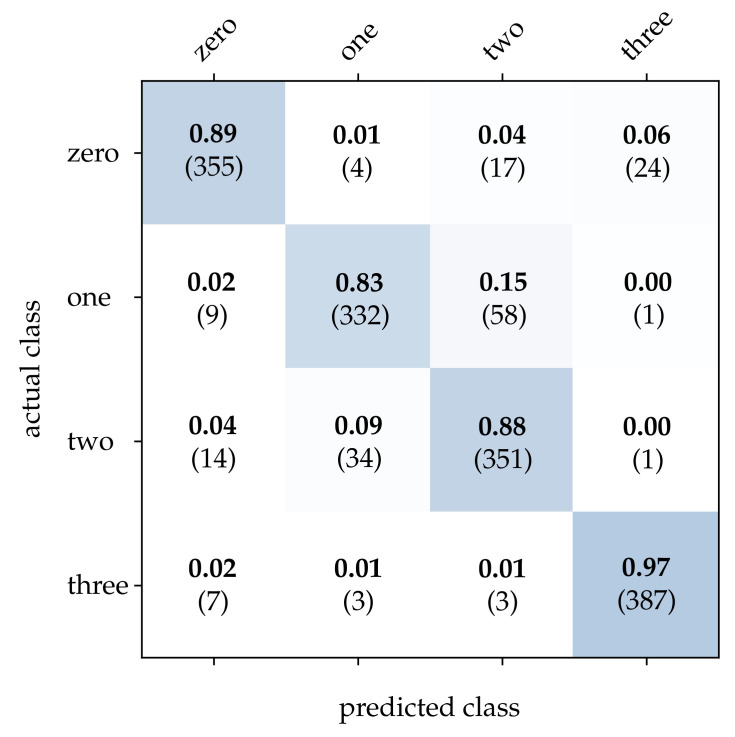
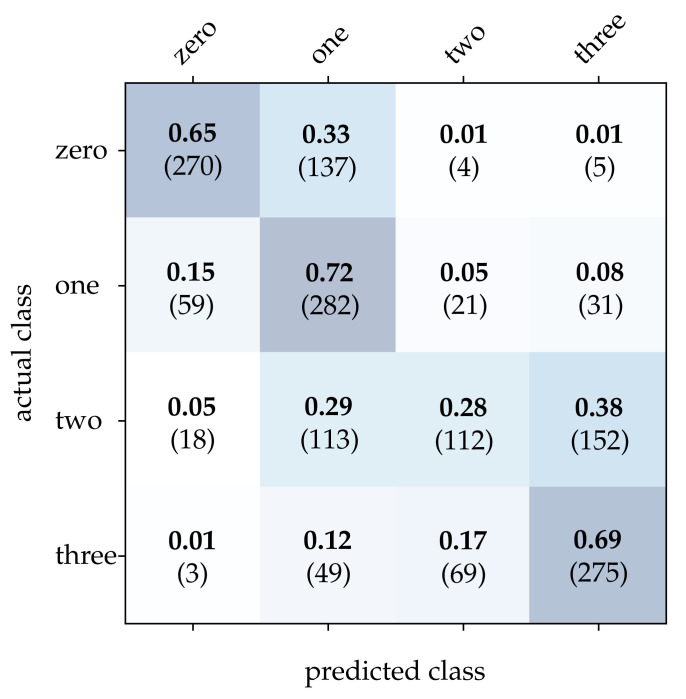
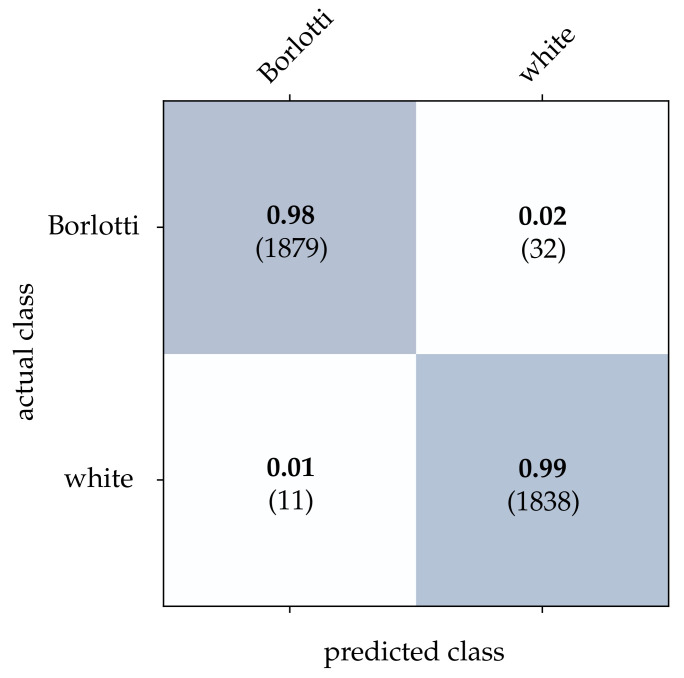
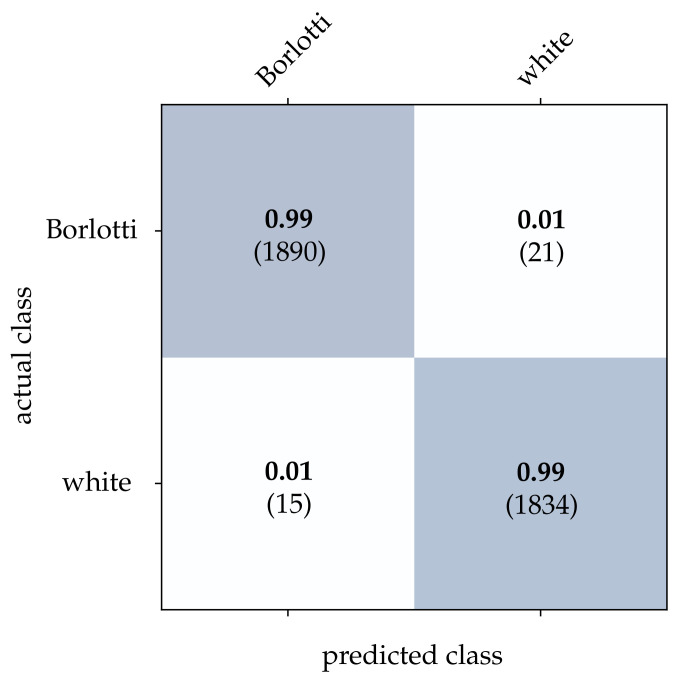
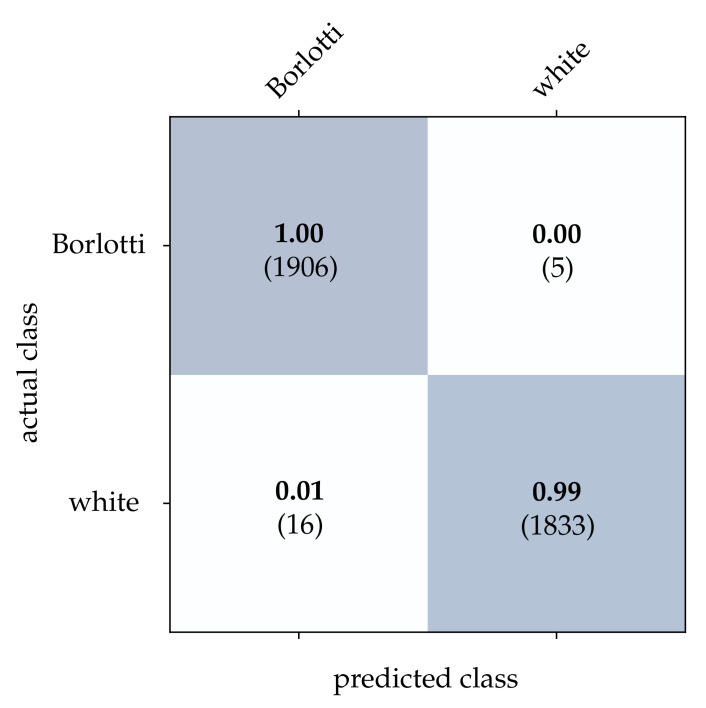
Dynamic Vision Sensors differ from conventional cameras in that only intensity changes of individual pixels are perceived and transmitted as an asynchronous stream instead of an entire frame. The technology promises, among other things, high temporal resolution and low latencies and data rates. While such sensors currently enjoy much scientific attention, there are only little publications on practical applications. One field of application that has hardly been considered so far, yet potentially fits well with the sensor principle due to its special properties, is automatic visual inspection. In this paper, we evaluate current state-of-the-art processing algorithms in this new application domain. We further propose an algorithmic approach for the identification of ideal time windows within an event stream for object classification. For the evaluation of our method, we acquire two novel datasets that contain typical visual inspection scenarios, i.e., the inspection of objects on a conveyor belt and during free fall. The success of our algorithmic extension for data processing is demonstrated on the basis of these new datasets by showing that classification accuracy of current algorithms is highly increased. By making our new datasets publicly available, we intend to stimulate further research on application of Dynamic Vision Sensors in machine vision applications.
Keywords: automatic visual inspection; dynamic vision sensors; event-based vision; object classification.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Adaptive Slicing Method of the Spatiotemporal Event Stream Obtained from a Dynamic Vision Sensor.Sensors (Basel). 2022 Mar 29;22(7):2614. doi: 10.3390/s22072614. Sensors (Basel). 2022. PMID: 35408227 Free PMC article.
-
CIFAR10-DVS: An Event-Stream Dataset for Object Classification.Front Neurosci. 2017 May 30;11:309. doi: 10.3389/fnins.2017.00309. eCollection 2017. Front Neurosci. 2017. PMID: 28611582 Free PMC article.
-
What can neuromorphic event-driven precise timing add to spike-based pattern recognition?Neural Comput. 2015 Mar;27(3):561-93. doi: 10.1162/NECO_a_00703. Epub 2015 Jan 20. Neural Comput. 2015. PMID: 25602775
-
Event-Based Vision: A Survey.IEEE Trans Pattern Anal Mach Intell. 2022 Jan;44(1):154-180. doi: 10.1109/TPAMI.2020.3008413. Epub 2021 Dec 7. IEEE Trans Pattern Anal Mach Intell. 2022. PMID: 32750812 Review.
-
A Review of Vision-Laser-Based Civil Infrastructure Inspection and Monitoring.Sensors (Basel). 2022 Aug 6;22(15):5882. doi: 10.3390/s22155882. Sensors (Basel). 2022. PMID: 35957439 Free PMC article. Review.
References
-
- Beyerer J., Puente León F., Frese C. Machine Vision: Automated Visual Inspection: Theory, Practice and Applications. Springer; Berlin/Heidelberg, Germany: 2016.
-
- Lichtsteiner P., Posch C., Delbruck T. A 128x128 120 dB 15 μ Latency Asynchronous Temporal Contrast Vision Sensor. IEEE J. Solid-State Circuits. 2008;43:566–576. doi: 10.1109/JSSC.2007.914337. - DOI
-
- Brandli C., Berner R., Yang M., Liu S.C., Delbruck T. A 240 × 180 130 db 3 μs latency global shutter spatiotemporal vision sensor. IEEE J. Solid-State Circuits. 2014;49:2333–2341. doi: 10.1109/JSSC.2014.2342715. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
