

The Accuracy and Precision of Gait Spatio-Temporal Parameters Extracted from an Instrumented Sock during Treadmill and Overground Walking in Healthy Subjects and Patients with a Foot Impairment Secondary to Psoriatic Arthritis
- PMID: 34577387
- PMCID: PMC8472002
- DOI: 10.3390/s21186179
The Accuracy and Precision of Gait Spatio-Temporal Parameters Extracted from an Instrumented Sock during Treadmill and Overground Walking in Healthy Subjects and Patients with a Foot Impairment Secondary to Psoriatic Arthritis
Abstract
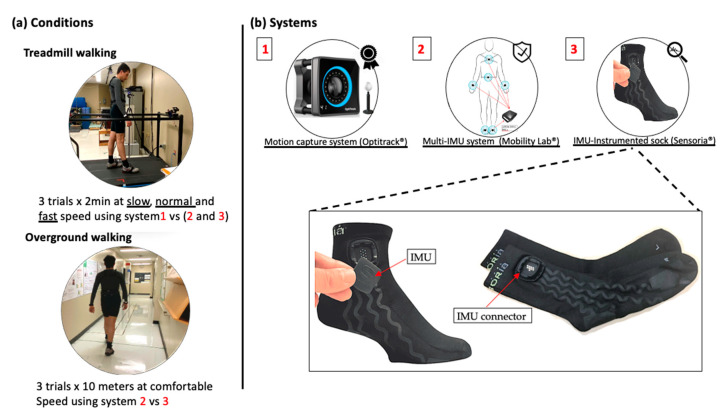
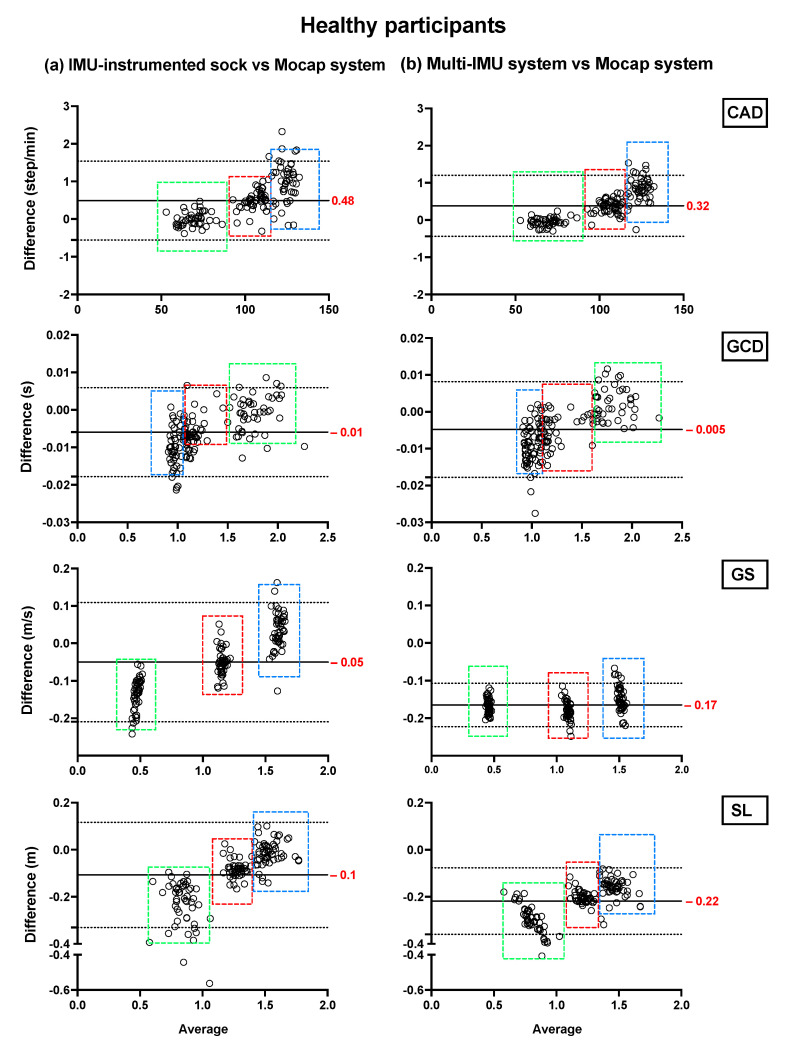
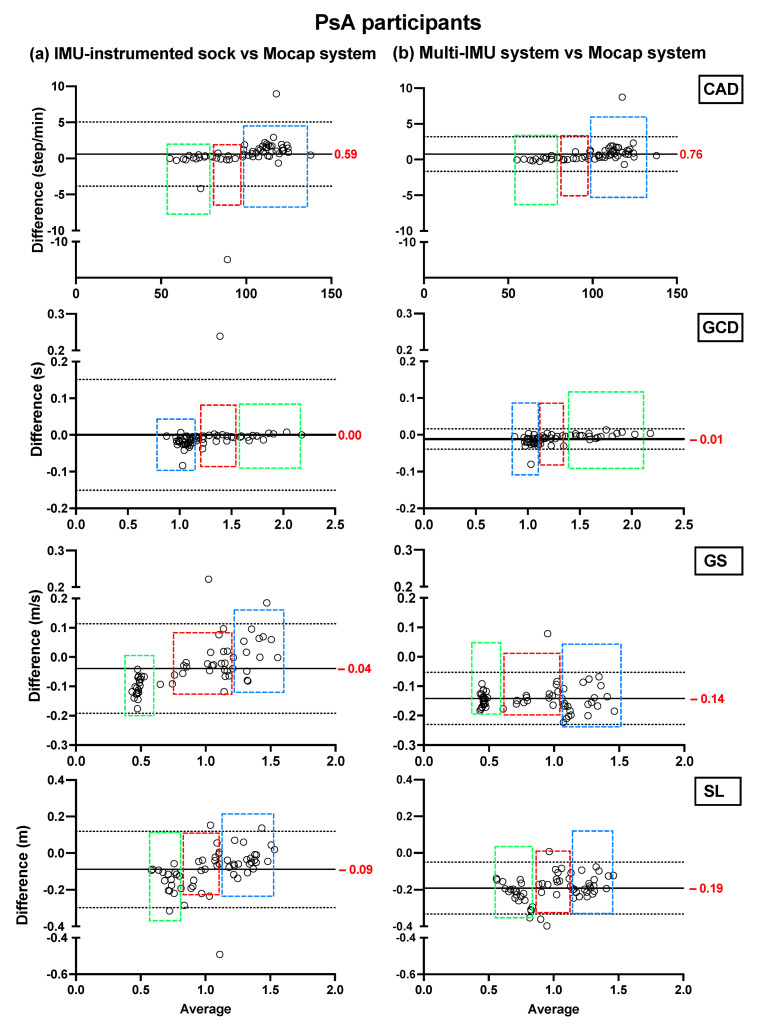
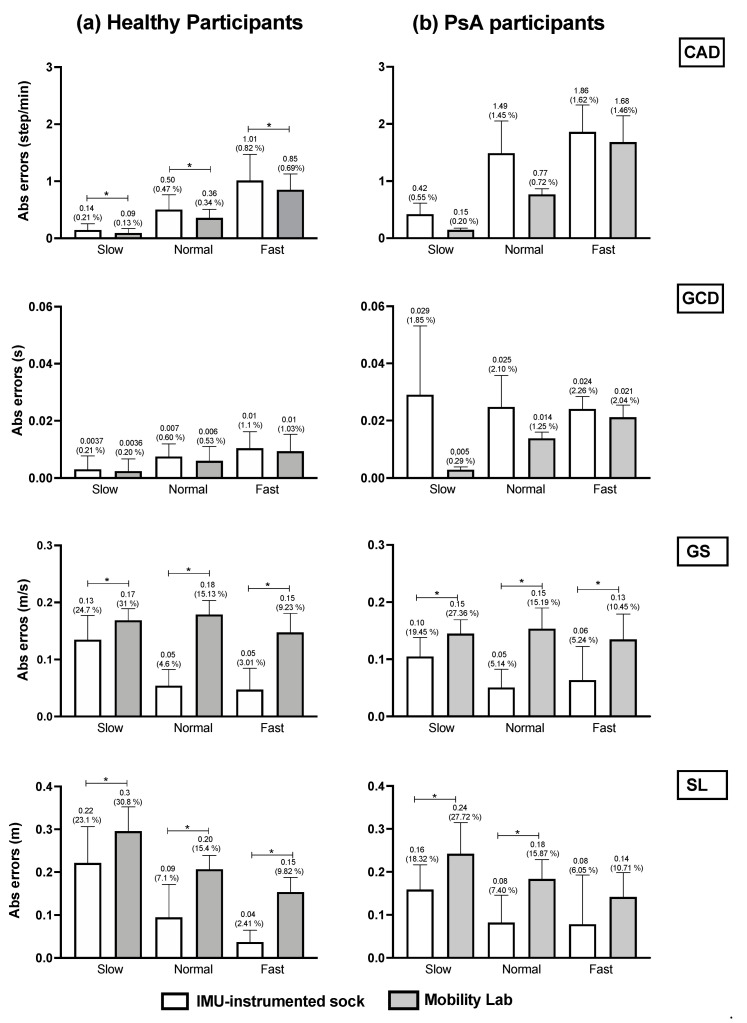
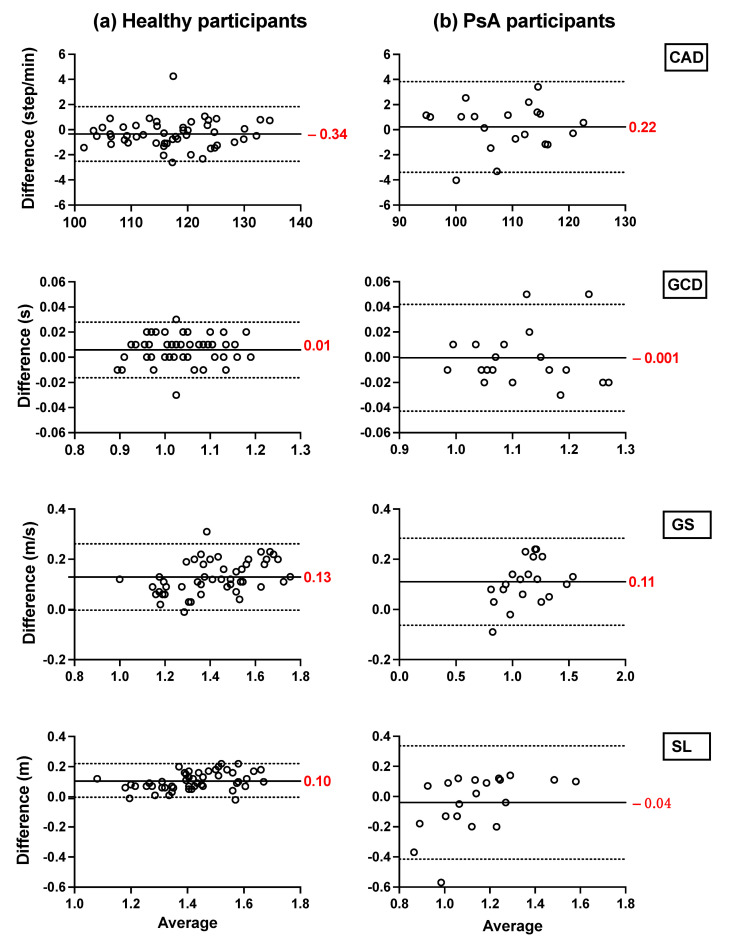
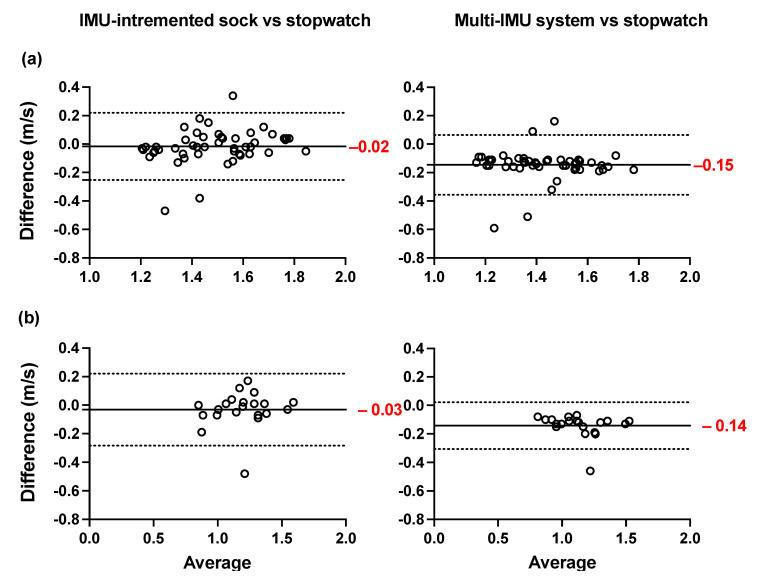
The objectives of this study were to assess the accuracy and precision of a system combining an IMU-instrumented sock and a validated algorithm for the estimation of the spatio-temporal parameters of gait. A total of 25 healthy participants (HP) and 21 patients with foot impairments secondary to psoriatic arthritis (PsA) performed treadmill walking at three different speeds and overground walking at a comfortable speed. HP performed the assessment over two sessions. The proposed system's estimations of cadence (CAD), gait cycle duration (GCD), gait speed (GS), and stride length (SL) obtained for treadmill walking were validated versus those estimated with a motion capture system. The system was also compared with a well-established multi-IMU-based system for treadmill and overground walking. The results showed a good agreement between the motion capture system and the IMU-instrumented sock in estimating the spatio-temporal parameters during the treadmill walking at normal and fast speeds for both HP and PsA participants. The accuracy of GS and SL obtained from the IMU-instrumented sock was better compared to the established multi-IMU-based system in both groups. The precision (inter-session reliability) of the gait parameter estimations obtained from the IMU-instrumented sock was good to excellent for overground walking and treadmill walking at fast speeds, but moderate-to-good for slow and normal treadmill walking. The proposed IMU-instrumented sock offers a novel form factor addressing the wearability issues of IMUs and could potentially be used to measure spatio-temporal parameters under clinical conditions and free-living conditions.
Keywords: IMUs; free-living measures; gait parameters; wearable systems.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures
Similar articles
-
Reproducibility of gait parameters at different surface inclinations and speeds using an instrumented treadmill system.Gait Posture. 2016 Feb;44:259-64. doi: 10.1016/j.gaitpost.2015.12.037. Epub 2015 Dec 29. Gait Posture. 2016. PMID: 27004668 Clinical Trial.
-
The Use of Embedded IMU Insoles to Assess Gait Parameters: A Validation and Test-Retest Reliability Study.Sensors (Basel). 2023 Sep 28;23(19):8155. doi: 10.3390/s23198155. Sensors (Basel). 2023. PMID: 37836986 Free PMC article.
-
Validity and reliability of a portable gait analysis system for measuring spatiotemporal gait characteristics: comparison to an instrumented treadmill.J Neuroeng Rehabil. 2016 Jan 20;13:6. doi: 10.1186/s12984-016-0115-z. J Neuroeng Rehabil. 2016. PMID: 26790409 Free PMC article.
-
Influence of body weight unloading on human gait characteristics: a systematic review.J Neuroeng Rehabil. 2018 Jun 20;15(1):53. doi: 10.1186/s12984-018-0380-0. J Neuroeng Rehabil. 2018. PMID: 29925400 Free PMC article.
-
Validation of an IMU Gait Analysis Algorithm for Gait Monitoring in Daily Life Situations.Annu Int Conf IEEE Eng Med Biol Soc. 2020 Jul;2020:4229-4232. doi: 10.1109/EMBC44109.2020.9176827. Annu Int Conf IEEE Eng Med Biol Soc. 2020. PMID: 33018930 Review.
Cited by
-
Leveraging Emerging Technologies to Expand Accessibility and Improve Precision in Rehabilitation and Exercise for People with Disabilities.Int J Environ Res Public Health. 2024 Jan 10;21(1):79. doi: 10.3390/ijerph21010079. Int J Environ Res Public Health. 2024. PMID: 38248542 Free PMC article. Review.
-
Mathematical Analysis and Motion Capture System Utilization Method for Standardization Evaluation of Tracking Objectivity of 6-DOF Arm Structure for Rehabilitation Training Exercise Therapy Robot.Diagnostics (Basel). 2022 Dec 15;12(12):3179. doi: 10.3390/diagnostics12123179. Diagnostics (Basel). 2022. PMID: 36553186 Free PMC article.
-
Spatiotemporal parameters and gait variability in people with psoriatic arthritis (PsA): a cross-sectional study.J Foot Ankle Res. 2022 Mar 4;15(1):19. doi: 10.1186/s13047-022-00521-y. J Foot Ankle Res. 2022. PMID: 35246222 Free PMC article.
References
-
- Platto M.J., O’Connell P.G., Hicks J.E., Gerber L.H. The Relationship of Pain and Deformity of the Rheumatoid Foot to Gait and an Index of Functional Ambulation. J. Rheumatol. 1991;18:38–43. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Research Materials
Miscellaneous
