

The Role of Surface Electromyography in Data Fusion with Inertial Sensors to Enhance Locomotion Recognition and Prediction
- PMID: 34577498
- PMCID: PMC8473357
- DOI: 10.3390/s21186291
The Role of Surface Electromyography in Data Fusion with Inertial Sensors to Enhance Locomotion Recognition and Prediction
Abstract
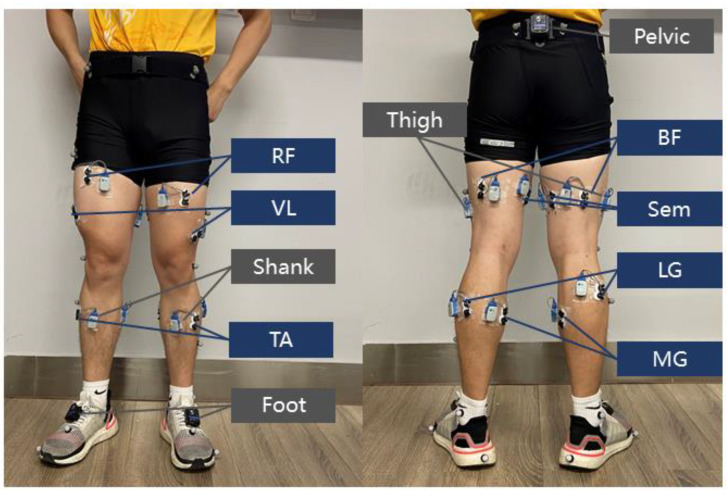
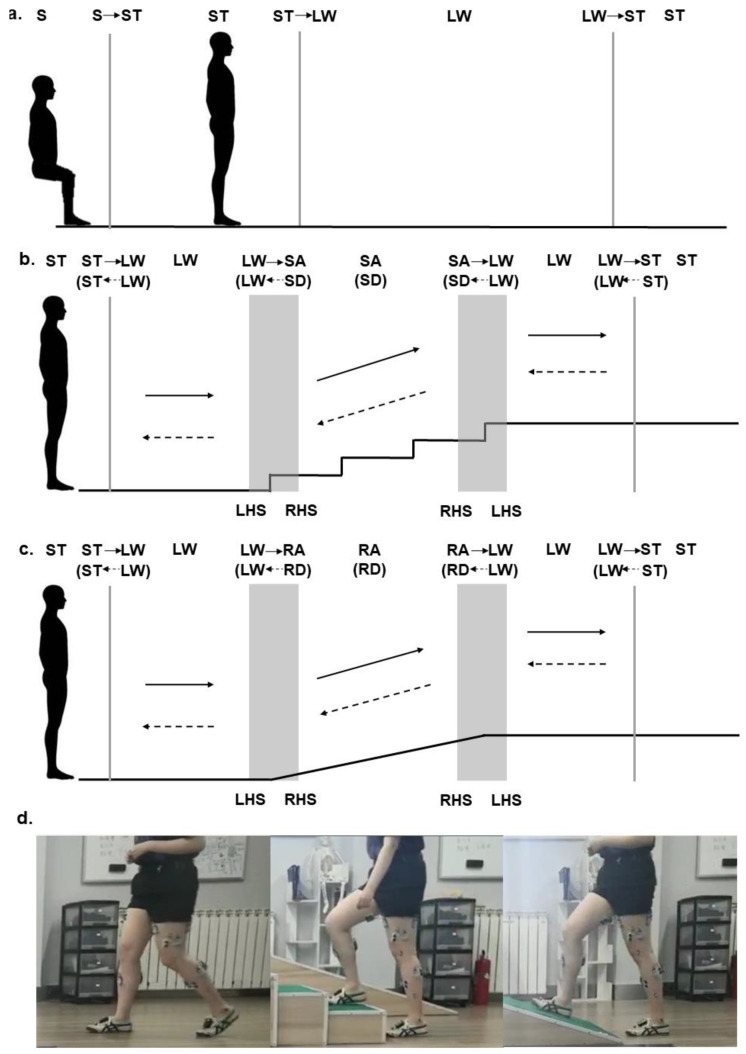
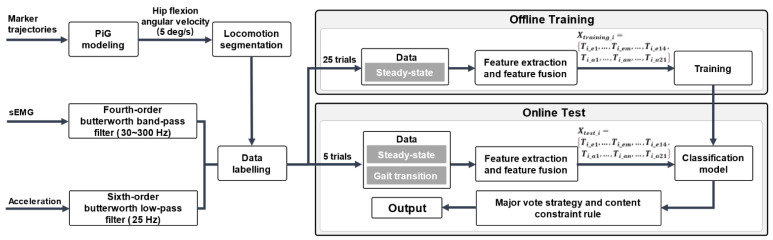
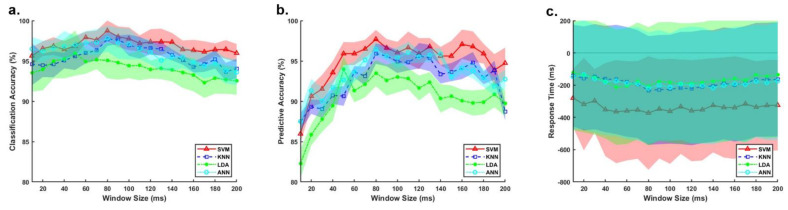
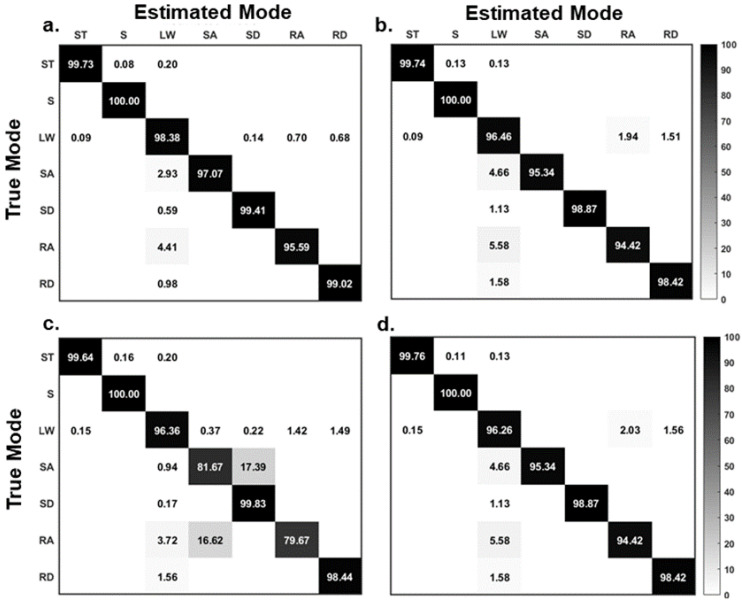
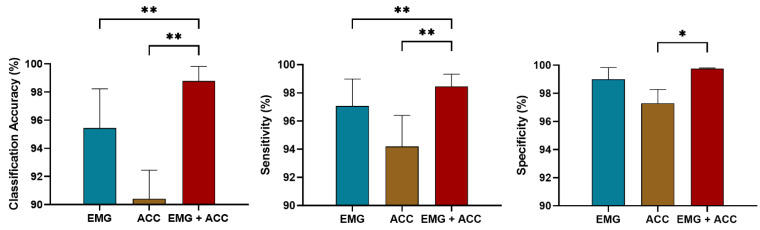
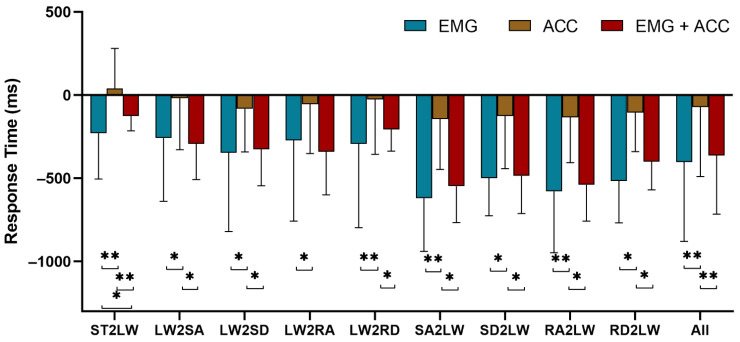
Locomotion recognition and prediction is essential for real-time human-machine interactive control. The integration of electromyography (EMG) with mechanical sensors could improve the performance of locomotion recognition. However, the potential of EMG in motion prediction is rarely discussed. This paper firstly investigated the effect of surface EMG on the prediction of locomotion while integrated with inertial data. We collected EMG signals of lower limb muscle groups and linear acceleration data of lower limb segments from ten healthy participants in seven locomotion activities. Classification models were built based on four machine learning methods-support vector machine (SVM), k-nearest neighbor (KNN), artificial neural network (ANN), and linear discriminant analysis (LDA)-where a major vote strategy and a content constraint rule were utilized for improving the online performance of the classification decision. We compared four classifiers and further investigated the effect of data fusion on the online locomotion classification. The results showed that the SVM model with a sliding window size of 80 ms achieved the best recognition performance. The fusion of EMG signals does not only improve the recognition accuracy of steady-state locomotion activity from 90% (using acceleration data only) to 98% (using data fusion) but also enables the prediction of the next steady locomotion (∼370 ms). The study demonstrates that the employment of EMG in locomotion recognition could enhance online prediction performance.
Keywords: data fusion; inertial sensor; locomotion prediction; locomotion recognition; machine learning; multimodal sensing; surface electromyography.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Analysis of using EMG and mechanical sensors to enhance intent recognition in powered lower limb prostheses.J Neural Eng. 2014 Oct;11(5):056021. doi: 10.1088/1741-2560/11/5/056021. Epub 2014 Sep 22. J Neural Eng. 2014. PMID: 25242111 Clinical Trial.
-
Human Locomotion Classification for Different Terrains Using Machine Learning Techniques.Crit Rev Biomed Eng. 2020;48(4):199-209. doi: 10.1615/CritRevBiomedEng.2020035013. Crit Rev Biomed Eng. 2020. PMID: 33463957
-
Multiday Evaluation of Techniques for EMG-Based Classification of Hand Motions.IEEE J Biomed Health Inform. 2019 Jul;23(4):1526-1534. doi: 10.1109/JBHI.2018.2864335. Epub 2018 Aug 8. IEEE J Biomed Health Inform. 2019. PMID: 30106701
-
Review on electromyography based intention for upper limb control using pattern recognition for human-machine interaction.Proc Inst Mech Eng H. 2022 May;236(5):628-645. doi: 10.1177/09544119221074770. Epub 2022 Feb 4. Proc Inst Mech Eng H. 2022. PMID: 35118907 Review.
-
Sensors and algorithms for locomotion intention detection of lower limb exoskeletons.Med Eng Phys. 2023 Mar;113:103960. doi: 10.1016/j.medengphy.2023.103960. Epub 2023 Feb 17. Med Eng Phys. 2023. PMID: 36966000 Review.
Cited by
-
A SE-DenseNet-LSTM model for locomotion mode recognition in lower limb exoskeleton.PeerJ Comput Sci. 2024 Feb 29;10:e1881. doi: 10.7717/peerj-cs.1881. eCollection 2024. PeerJ Comput Sci. 2024. PMID: 38435551 Free PMC article.
-
Human lower limb activity recognition techniques, databases, challenges and its applications using sEMG signal: an overview.Biomed Eng Lett. 2022 Jun 24;12(4):343-358. doi: 10.1007/s13534-022-00236-w. eCollection 2022 Nov. Biomed Eng Lett. 2022. PMID: 36238368 Free PMC article. Review.
-
Low limb prostheses and complex human prosthetic interaction: A systematic literature review.Front Robot AI. 2023 Feb 13;10:1032748. doi: 10.3389/frobt.2023.1032748. eCollection 2023. Front Robot AI. 2023. PMID: 36860557 Free PMC article. Review.
-
A hybrid linear discriminant analysis and genetic algorithm to create a linear model of aging when performing motor tasks through inertial sensors positioned on the hand and forearm.Biomed Eng Online. 2023 Oct 16;22(1):98. doi: 10.1186/s12938-023-01161-4. Biomed Eng Online. 2023. PMID: 37845723 Free PMC article.
-
Real-time locomotion mode detection in individuals with transfemoral amputation and osseointegration.J Neuroeng Rehabil. 2025 Jun 24;22(1):142. doi: 10.1186/s12984-025-01672-2. J Neuroeng Rehabil. 2025. PMID: 40551132 Free PMC article.
References
-
- Li H., Derrode S., Pieczynski W. An adaptive and on-line IMU-based locomotion activity classification method using a triplet Markov model. Neurocomputing. 2019;362:94–105. doi: 10.1016/j.neucom.2019.06.081. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
