

Probabilistic tsunami forecasting for early warning
- PMID: 34584083
- PMCID: PMC8479076
- DOI: 10.1038/s41467-021-25815-w
Probabilistic tsunami forecasting for early warning
Abstract
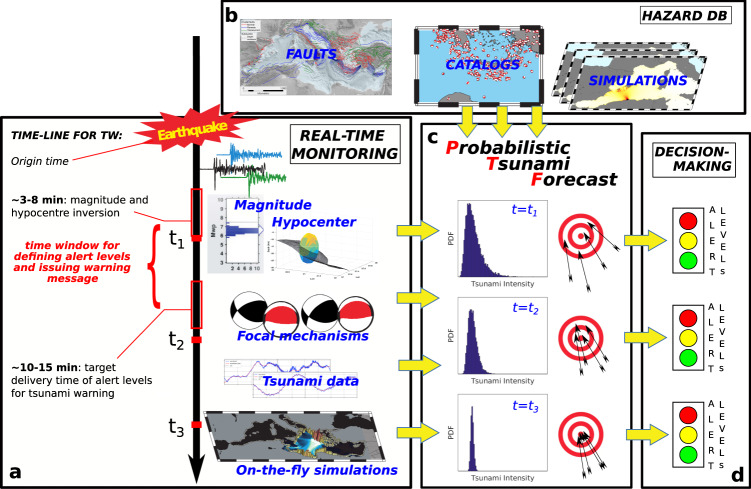
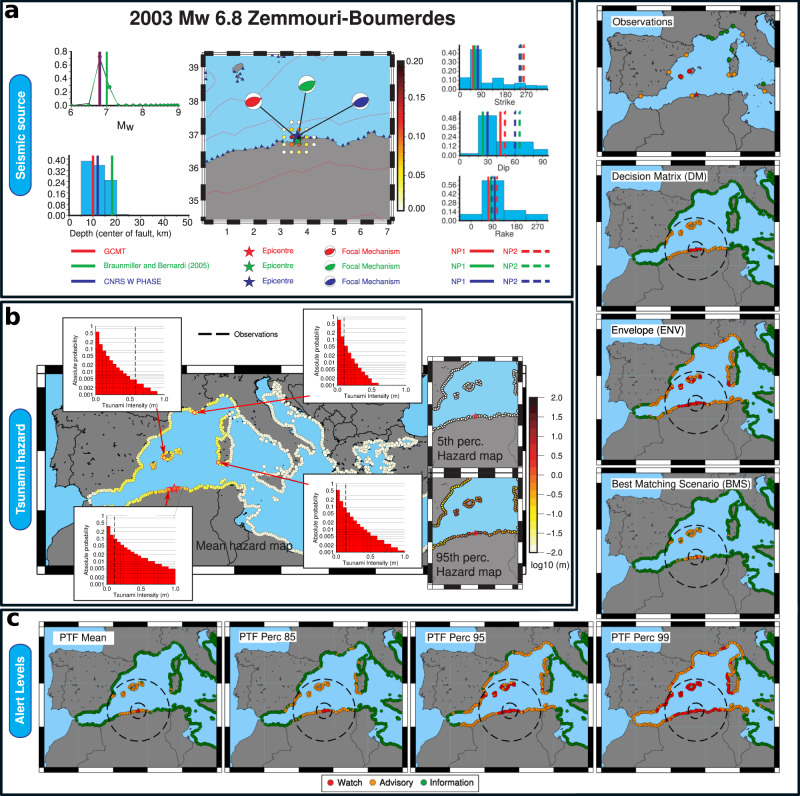
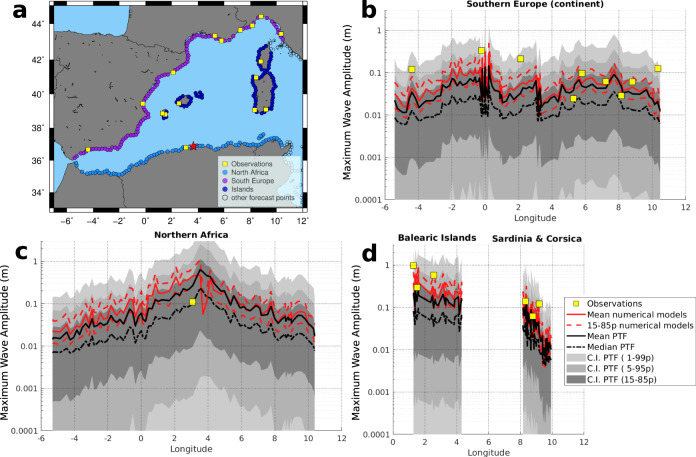
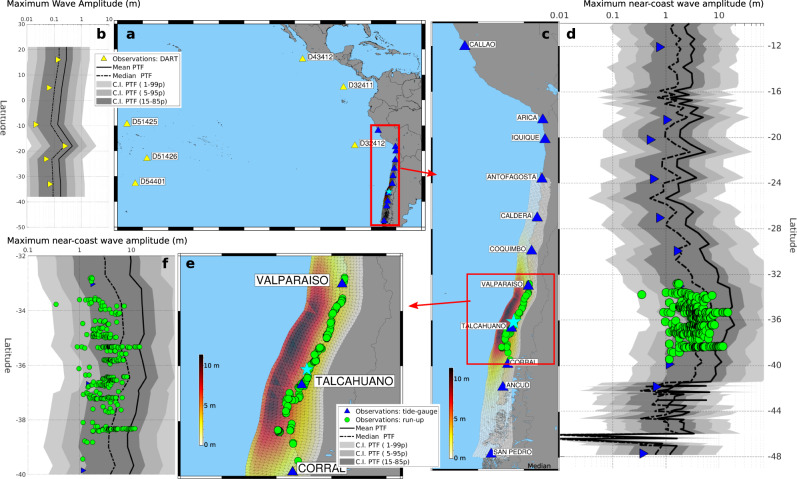
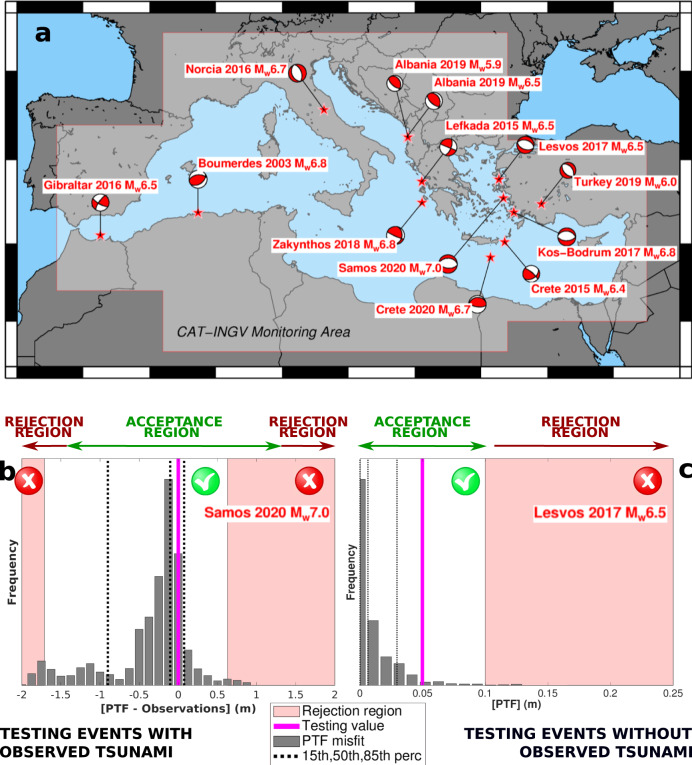
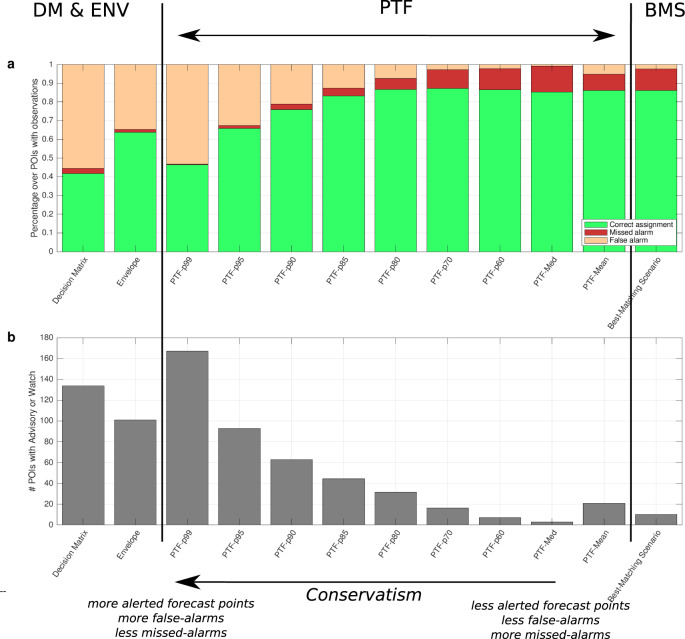
Tsunami warning centres face the challenging task of rapidly forecasting tsunami threat immediately after an earthquake, when there is high uncertainty due to data deficiency. Here we introduce Probabilistic Tsunami Forecasting (PTF) for tsunami early warning. PTF explicitly treats data- and forecast-uncertainties, enabling alert level definitions according to any predefined level of conservatism, which is connected to the average balance of missed-vs-false-alarms. Impact forecasts and resulting recommendations become progressively less uncertain as new data become available. Here we report an implementation for near-source early warning and test it systematically by hindcasting the great 2010 M8.8 Maule (Chile) and the well-studied 2003 M6.8 Zemmouri-Boumerdes (Algeria) tsunamis, as well as all the Mediterranean earthquakes that triggered alert messages at the Italian Tsunami Warning Centre since its inception in 2015, demonstrating forecasting accuracy over a wide range of magnitudes and earthquake types.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Satake K, Fujii Y, Harada T, Namegaya Y. Time and space distribution of Coseismic Slip of the 2011 Tohoku earthquake as inferred from tsunami waveform data. Bull. Seismol. Soc. Am. 2013;103:1473–1492. doi: 10.1785/0120120122. - DOI
-
- Palmer TN, et al. Representing model uncertainty in weather and climate prediction. Annu. Rev. Earth Planet. Sci. 2005;33:163–193. doi: 10.1146/annurev.earth.33.092203.122552. - DOI
-
- Leutbecher M, Palmer TN. Ensemble forecasting. J. Comput. Phys. 2008;227:3515–3539. doi: 10.1016/j.jcp.2007.02.014. - DOI
-
- Kanamori H, Rivera L. Source inversion of W phase: speeding up seismic tsunami warning. Geophys. J. Int. 2008;175:222–238. doi: 10.1111/j.1365-246X.2008.03887.x. - DOI
Publication types
LinkOut - more resources
Full Text Sources
