

Control of Newly-Designed Wearable Robotic Hand Exoskeleton Based on Surface Electromyographic Signals
- PMID: 34603003
- PMCID: PMC8480391
- DOI: 10.3389/fnbot.2021.711047
Control of Newly-Designed Wearable Robotic Hand Exoskeleton Based on Surface Electromyographic Signals
Abstract
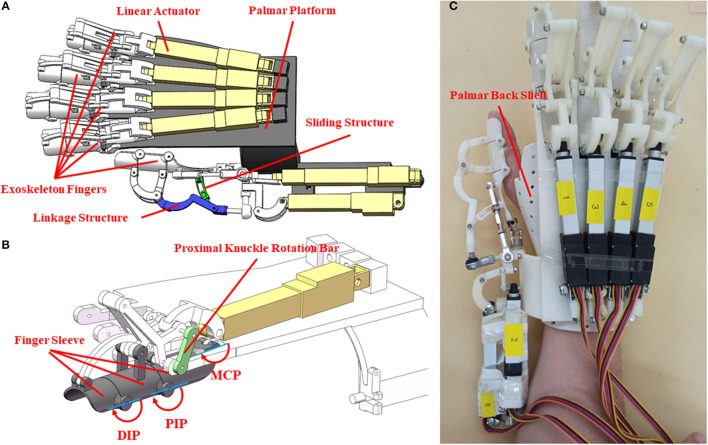
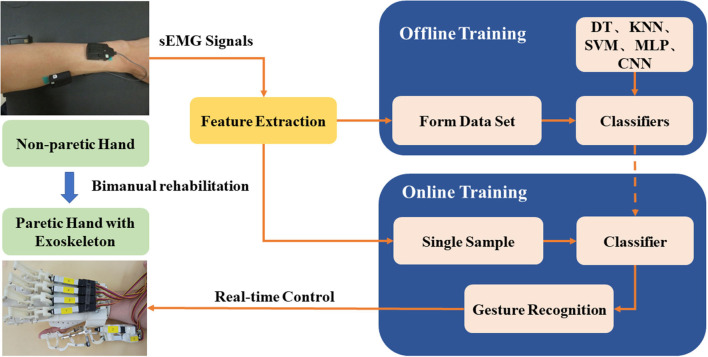
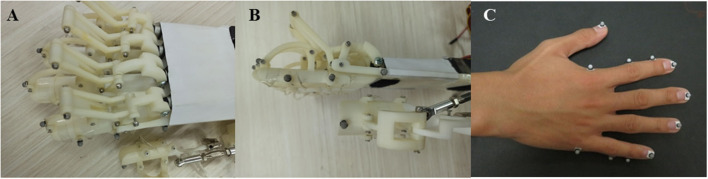
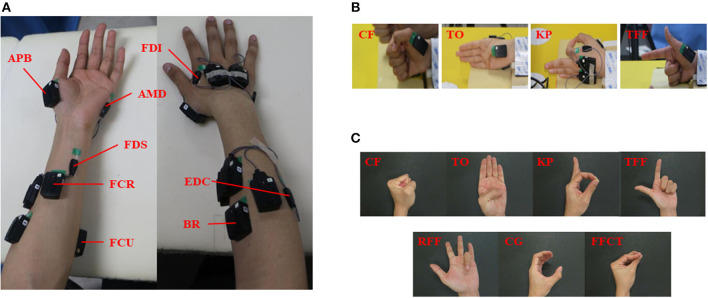
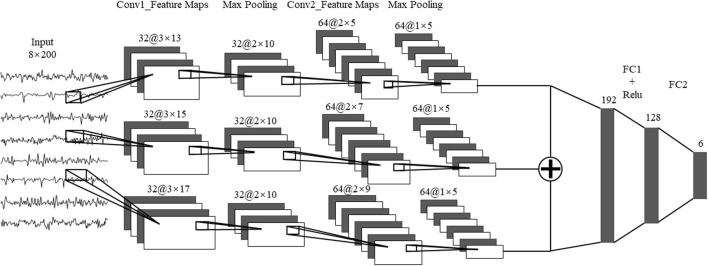
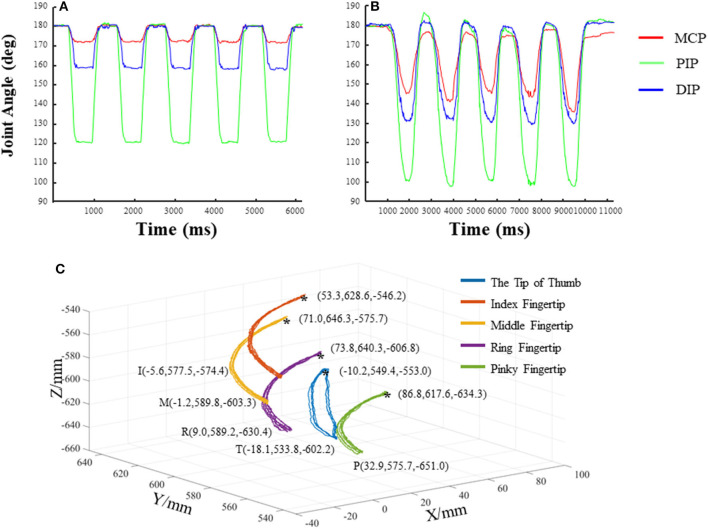
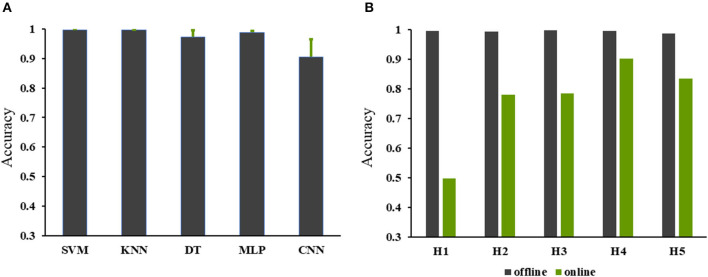
The human hand plays a role in a variety of daily activities. This intricate instrument is vulnerable to trauma or neuromuscular disorders. Wearable robotic exoskeletons are an advanced technology with the potential to remarkably promote the recovery of hand function. However, the still face persistent challenges in mechanical and functional integration, with real-time control of the multiactuators in accordance with the motion intentions of the user being a particular sticking point. In this study, we demonstrated a newly-designed wearable robotic hand exoskeleton with multijoints, more degrees of freedom (DOFs), and a larger range of motion (ROM). The exoskeleton hand comprises six linear actuators (two for the thumb and the other four for the fingers) and can realize both independent movements of each digit and coordinative movement involving multiple fingers for grasp and pinch. The kinematic parameters of the hand exoskeleton were analyzed by a motion capture system. The exoskeleton showed higher ROM of the proximal interphalangeal and distal interphalangeal joints compared with the other exoskeletons. Five classifiers including support vector machine (SVM), K-near neighbor (KNN), decision tree (DT), multilayer perceptron (MLP), and multichannel convolutional neural networks (multichannel CNN) were compared for the offline classification. The SVM and KNN had a higher accuracy than the others, reaching up to 99%. For the online classification, three out of the five subjects showed an accuracy of about 80%, and one subject showed an accuracy over 90%. These results suggest that the new wearable exoskeleton could facilitate hand rehabilitation for a larger ROM and higher dexterity and could be controlled according to the motion intention of the subjects.
Keywords: exoskeleton; gesture recognition; hand rehabilitation; surface electromyography; wearable robots.
Copyright © 2021 Li, Li, Zeng and Wei.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
Myoelectric Control of a Soft Hand Exoskeleton Using Kinematic Synergies.IEEE Trans Biomed Circuits Syst. 2019 Dec;13(6):1351-1361. doi: 10.1109/TBCAS.2019.2950145. Epub 2019 Oct 28. IEEE Trans Biomed Circuits Syst. 2019. PMID: 31670679
-
Voluntary control of wearable robotic exoskeletons by patients with paresis via neuromechanical modeling.J Neuroeng Rehabil. 2019 Jul 17;16(1):91. doi: 10.1186/s12984-019-0559-z. J Neuroeng Rehabil. 2019. PMID: 31315633 Free PMC article.
-
Design and Prototyping of an Underactuated Hand Exoskeleton With Fingers Coupled by a Gear-Based Differential.Front Robot AI. 2022 Mar 29;9:862340. doi: 10.3389/frobt.2022.862340. eCollection 2022. Front Robot AI. 2022. PMID: 35425814 Free PMC article.
-
Application of EMG signals for controlling exoskeleton robots.Biomed Tech (Berl). 2006 Dec;51(5-6):314-9. doi: 10.1515/BMT.2006.063. Biomed Tech (Berl). 2006. PMID: 17155866 Review.
-
Exoskeleton and End-Effector Robots for Upper and Lower Limbs Rehabilitation: Narrative Review.PM R. 2018 Sep;10(9 Suppl 2):S174-S188. doi: 10.1016/j.pmrj.2018.06.005. PM R. 2018. PMID: 30269804 Review.
Cited by
-
An Instrumented Glove-Controlled Portable Hand-Exoskeleton for Bilateral Hand Rehabilitation.Biosensors (Basel). 2021 Dec 3;11(12):495. doi: 10.3390/bios11120495. Biosensors (Basel). 2021. PMID: 34940252 Free PMC article.
-
Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot.Micromachines (Basel). 2023 Apr 15;14(4):858. doi: 10.3390/mi14040858. Micromachines (Basel). 2023. PMID: 37421091 Free PMC article.
-
Limb Preservation and Functional Reconstruction after Complete Amputation and Replantation of the Upper Arm and Thigh.Plast Reconstr Surg Glob Open. 2024 Aug 26;12(8):e6091. doi: 10.1097/GOX.0000000000006091. eCollection 2024 Aug. Plast Reconstr Surg Glob Open. 2024. PMID: 39188960 Free PMC article.
-
Review of sEMG for Exoskeleton Robots: Motion Intention Recognition Techniques and Applications.Sensors (Basel). 2025 Apr 13;25(8):2448. doi: 10.3390/s25082448. Sensors (Basel). 2025. PMID: 40285139 Free PMC article. Review.
-
A Review of Hand Function Rehabilitation Systems Based on Hand Motion Recognition Devices and Artificial Intelligence.Brain Sci. 2022 Aug 15;12(8):1079. doi: 10.3390/brainsci12081079. Brain Sci. 2022. PMID: 36009142 Free PMC article. Review.
References
-
- Amin M. G., Zeng Z., Shan T. (2019). Hand gesture recognition based on radar micro-doppler signature envelopes, in 2019 IEEE Radar Conference (Boston, MA: ). 10.1109/RADAR.2019.8835661 - DOI
-
- Chen M., Cheng L., Huang F., Yan Y., Hou Z. G. (2017). Towards robot-assisted post-stroke hand rehabilitation: fugl-meyer gesture recognition using sEMG, in 2017 Ieee 7th Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems(Honolulu, HI), 1472–1477. 10.1109/CYBER.2017.8446436 - DOI
LinkOut - more resources
Full Text Sources