

Convergent cross sorting for estimating dynamic coupling
- PMID: 34645847
- PMCID: PMC8514556
- DOI: 10.1038/s41598-021-98864-2
Convergent cross sorting for estimating dynamic coupling
Abstract
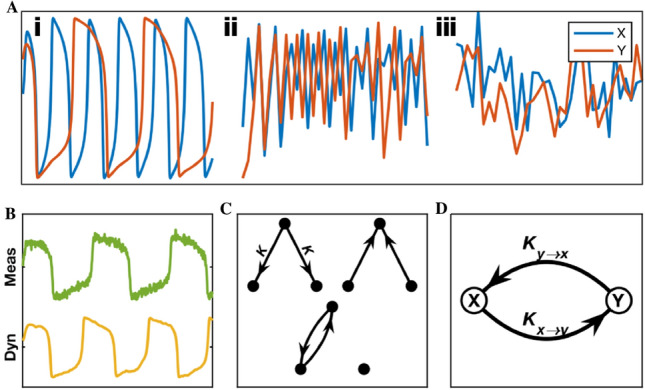
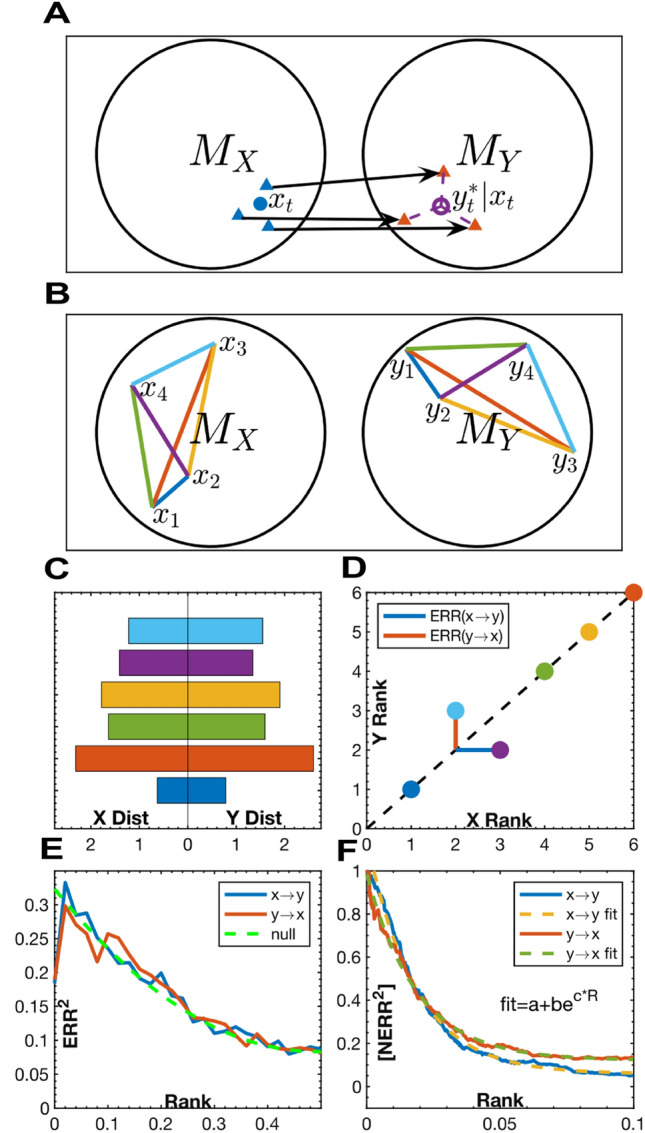
Natural systems exhibit diverse behavior generated by complex interactions between their constituent parts. To characterize these interactions, we introduce Convergent Cross Sorting (CCS), a novel algorithm based on convergent cross mapping (CCM) for estimating dynamic coupling from time series data. CCS extends CCM by using the relative ranking of distances within state-space reconstructions to improve the prior methods' performance at identifying the existence, relative strength, and directionality of coupling across a wide range of signal and noise characteristics. In particular, relative to CCM, CCS has a large performance advantage when analyzing very short time series data and data from continuous dynamical systems with synchronous behavior. This advantage allows CCS to better uncover the temporal and directional relationships within systems that undergo frequent and short-lived switches in dynamics, such as neural systems. In this paper, we validate CCS on simulated data and demonstrate its applicability to electrophysiological recordings from interacting brain regions.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures





References
-
- Quyen MLV, Martinerie J, Adam C, Varela FJ. Nonlinear analyses of interictal EEG map the brain interdependences in human focal epilepsy. Physica D. 1999;127:250–266. doi: 10.1016/S0167-2789(98)00258-9. - DOI
-
- Hlaváčková-Schindler K, Paluš M, Vejmelka M, Bhattacharya J. Causality detection based on information-theoretic approaches in time series analysis. Phys. Rep. 2007;441:1–46. doi: 10.1016/j.physrep.2006.12.004. - DOI
