

An Adaptive Mechatronic Exoskeleton for Force-Controlled Finger Rehabilitation
- PMID: 34660703
- PMCID: PMC8514640
- DOI: 10.3389/frobt.2021.716451
An Adaptive Mechatronic Exoskeleton for Force-Controlled Finger Rehabilitation
Abstract
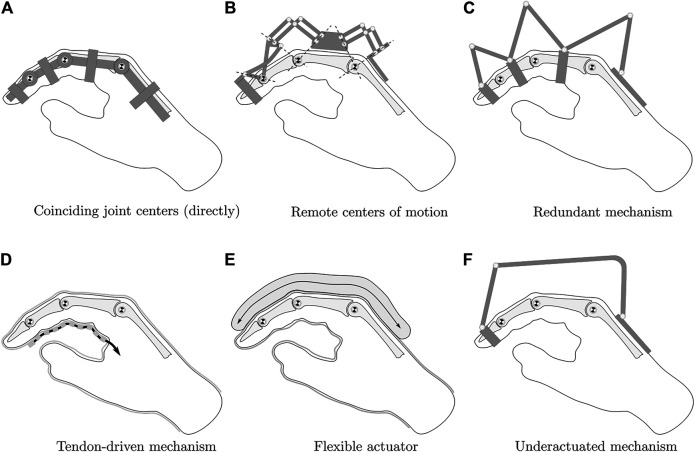
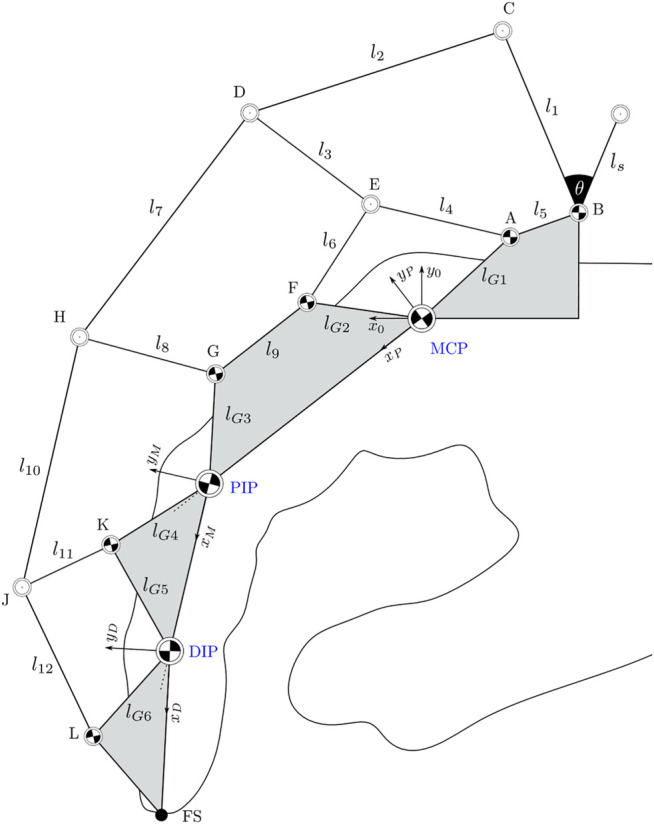
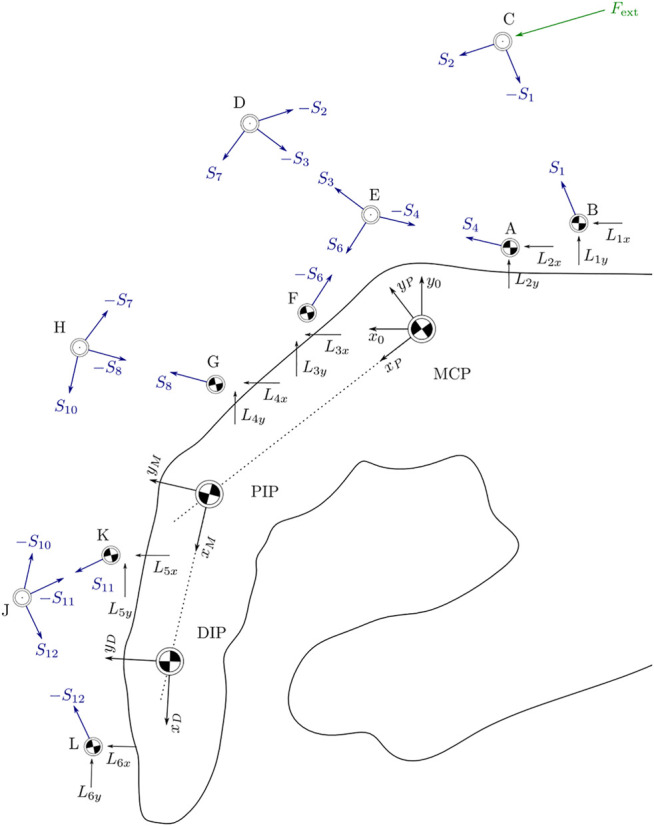
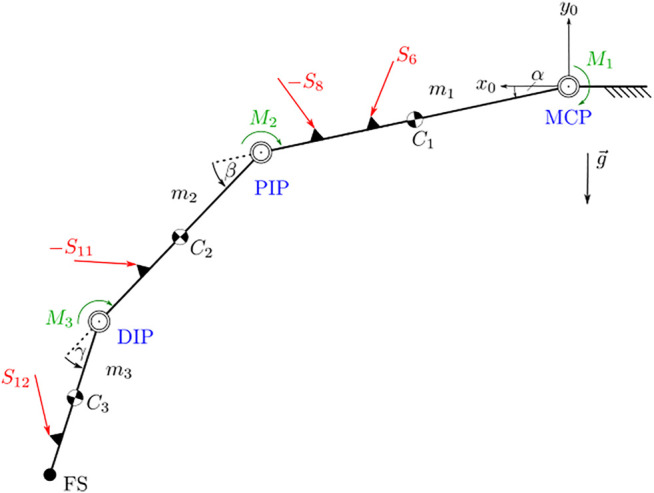
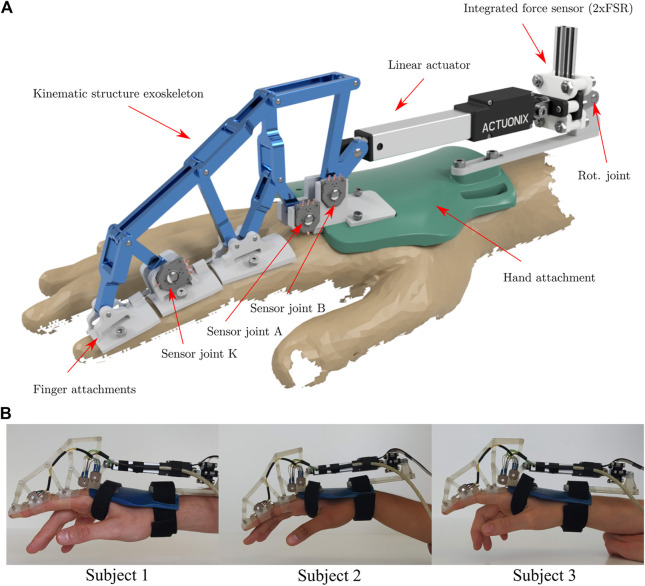
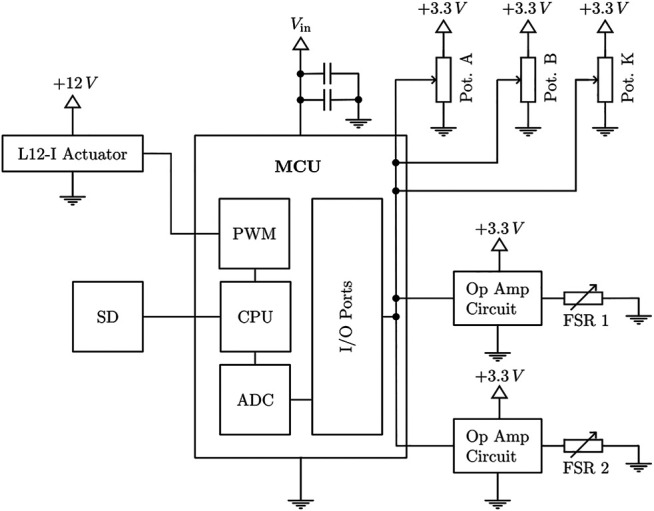
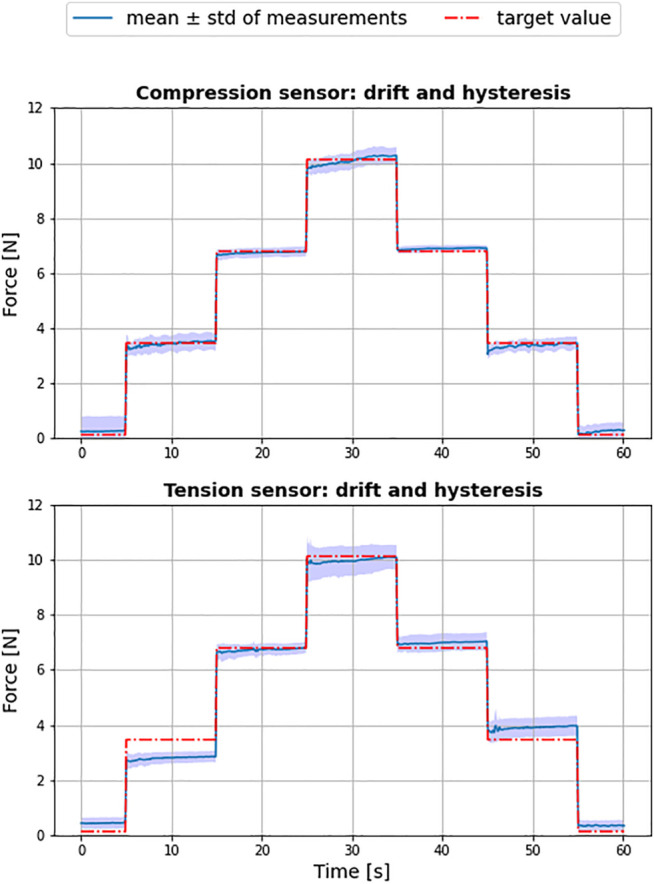
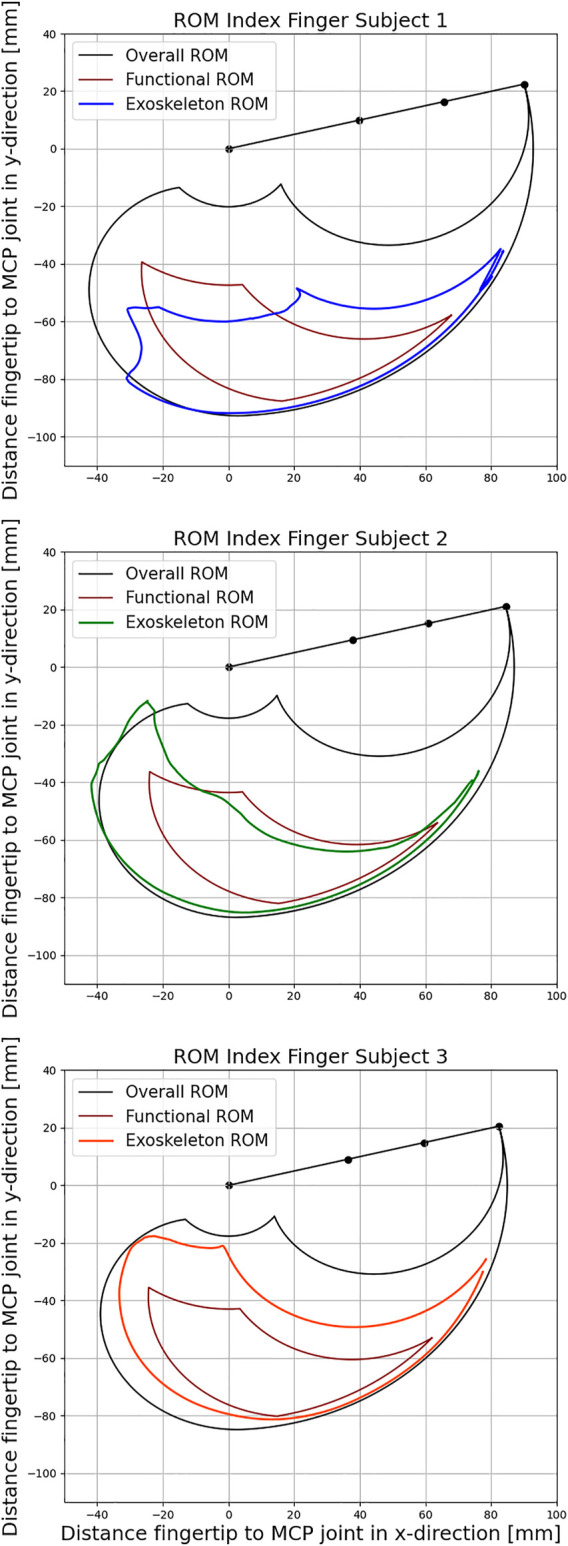
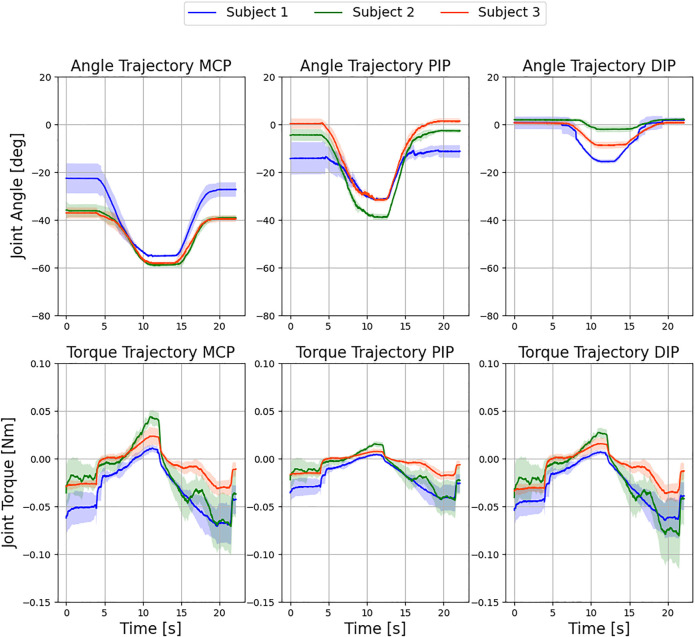
This paper presents a novel mechatronic exoskeleton architecture for finger rehabilitation. The system consists of an underactuated kinematic structure that enables the exoskeleton to act as an adaptive finger stimulator. The exoskeleton has sensors for motion detection and control. The proposed architecture offers three main advantages. First, the exoskeleton enables accurate quantification of subject-specific finger dynamics. The configuration of the exoskeleton can be fully reconstructed using measurements from three angular position sensors placed on the kinematic structure. In addition, the actuation force acting on the exoskeleton is recorded. Thus, the range of motion (ROM) and the force and torque trajectories of each finger joint can be determined. Second, the adaptive kinematic structure allows the patient to perform various functional tasks. The force control of the exoskeleton acts like a safeguard and limits the maximum possible joint torques during finger movement. Last, the system is compact, lightweight and does not require extensive peripherals. Due to its safety features, it is easy to use in the home. Applicability was tested in three healthy subjects.
Keywords: adaptive control; assisstive technologies; exoskeletal analysis; exoskeletal assist system; interaction; manipulator; rehabilitate.
Copyright © 2021 Dickmann , Wilhelm, Glowalla , Haddadin , van der Smagt and Burgkart .
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures



References
-
- Aragón-Martínez A., Arias-Montiel M., Lugo-González E., Tapia-Herrera R. (2020). Two-finger Exoskeleton with Force Feedback for a mobile Robot Teleoperation. Int. J. Adv. Robotic Syst. 17, 172988141989564. 10.1177/1729881419895648 - DOI
-
- Carbone G., Gerding E. C., Corves B., Cafolla D., Russo M., Ceccarelli M. (2020). Design of a Two-DOFs Driving Mechanism for a Motion-Assisted finger Exoskeleton. Appl. Sci. 10, 2619. 10.3390/app10072619 - DOI
-
- Cempini M., Cortese M., Vitiello N. (2015). A Powered finger–thumb Wearable Hand Exoskeleton with Self-Aligning Joint Axes. IEEE/ASME Trans. Mechatronics 20, 705–716. 10.1109/TMECH.2014.2315528 - DOI
LinkOut - more resources
Full Text Sources
Medical