

Friction modulation in limbless, three-dimensional gaits and heterogeneous terrains
- PMID: 34667170
- PMCID: PMC8526626
- DOI: 10.1038/s41467-021-26276-x
Friction modulation in limbless, three-dimensional gaits and heterogeneous terrains
Abstract
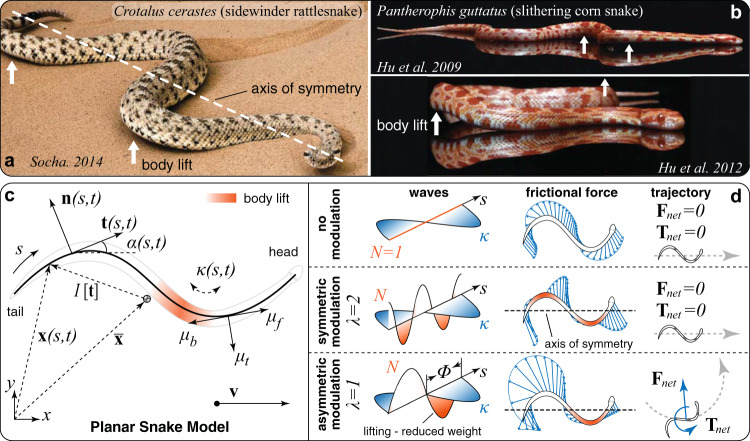
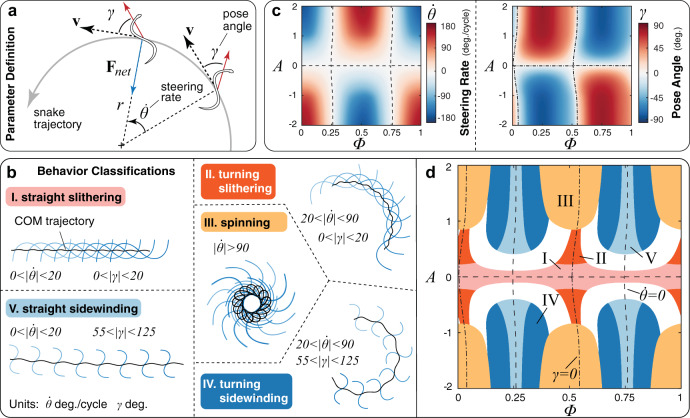
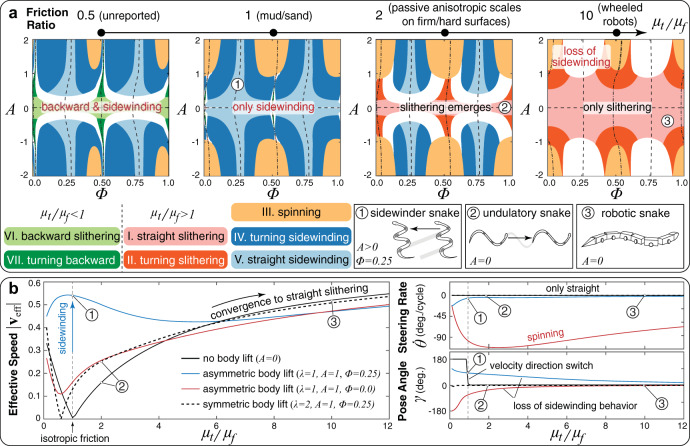
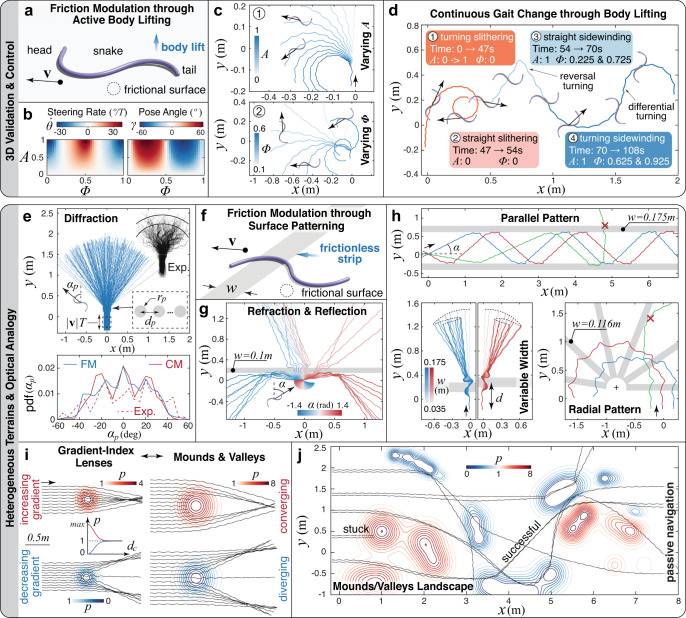
Motivated by a possible convergence of terrestrial limbless locomotion strategies ultimately determined by interfacial effects, we show how both 3D gait alterations and locomotory adaptations to heterogeneous terrains can be understood through the lens of local friction modulation. Via an effective-friction modeling approach, compounded by 3D simulations, the emergence and disappearance of a range of locomotory behaviors observed in nature is systematically explained in relation to inhabited environments. Our approach also simplifies the treatment of terrain heterogeneity, whereby even solid obstacles may be seen as high friction regions, which we confirm against experiments of snakes 'diffracting' while traversing rows of posts, similar to optical waves. We further this optic analogy by illustrating snake refraction, reflection and lens focusing. We use these insights to engineer surface friction patterns and demonstrate passive snake navigation in complex topographies. Overall, our study outlines a unified view that connects active and passive 3D mechanics with heterogeneous interfacial effects to explain a broad set of biological observations, and potentially inspire engineering design.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
Similar articles
-
Lateral Oscillation and Body Compliance Help Snakes and Snake Robots Stably Traverse Large, Smooth Obstacles.Integr Comp Biol. 2020 Jul 1;60(1):171-179. doi: 10.1093/icb/icaa013. Integr Comp Biol. 2020. PMID: 32215569 Review.
-
Mechanical diffraction reveals the role of passive dynamics in a slithering snake.Proc Natl Acad Sci U S A. 2019 Mar 12;116(11):4798-4803. doi: 10.1073/pnas.1808675116. Epub 2019 Feb 25. Proc Natl Acad Sci U S A. 2019. PMID: 30804193 Free PMC article.
-
Snakes mimic earthworms: propulsion using rectilinear travelling waves.J R Soc Interface. 2013 May 1;10(84):20130188. doi: 10.1098/rsif.2013.0188. Print 2013 Jul 6. J R Soc Interface. 2013. PMID: 23635494 Free PMC article.
-
Mechanical intelligence simplifies control in terrestrial limbless locomotion.Sci Robot. 2023 Dec 20;8(85):eadi2243. doi: 10.1126/scirobotics.adi2243. Epub 2023 Dec 20. Sci Robot. 2023. PMID: 38117866
-
Facultatively Sidewinding Snakes and the Origins of Locomotor Specialization.Integr Comp Biol. 2020 Jul 1;60(1):202-214. doi: 10.1093/icb/icaa011. Integr Comp Biol. 2020. PMID: 32176289 Review.
Cited by
-
Topology, dynamics, and control of a muscle-architected soft arm.Proc Natl Acad Sci U S A. 2024 Oct 8;121(41):e2318769121. doi: 10.1073/pnas.2318769121. Epub 2024 Oct 1. Proc Natl Acad Sci U S A. 2024. PMID: 39352928 Free PMC article.
-
On the mechanical origins of waving, coiling and skewing in Arabidopsis thaliana roots.Proc Natl Acad Sci U S A. 2024 Mar 12;121(11):e2312761121. doi: 10.1073/pnas.2312761121. Epub 2024 Mar 6. Proc Natl Acad Sci U S A. 2024. PMID: 38446852 Free PMC article.
-
Curvilinear Kirigami Skins Let Soft Bending Actuators Slither Faster.Front Robot AI. 2022 May 3;9:872007. doi: 10.3389/frobt.2022.872007. eCollection 2022. Front Robot AI. 2022. PMID: 35592681 Free PMC article.
-
Continuum Robots and Magnetic Soft Robots: From Models to Interdisciplinary Challenges for Medical Applications.Micromachines (Basel). 2024 Feb 24;15(3):313. doi: 10.3390/mi15030313. Micromachines (Basel). 2024. PMID: 38542560 Free PMC article. Review.
References
-
- Gazzola M, Argentina M, Mahadevan L. Scaling macroscopic aquatic locomotion. Nat. Phys. 2014;10:758–761. doi: 10.1038/nphys3078. - DOI
-
- Gans, C. Terrestrial locomotion without limbs. Am. Zool. 2, 167–182 (1962).
-
- Wiens JJ, Brandley MC, Reeder TW. Why does a trait evolve multiple times within a clade? repeated evolution of snakeline body form in squamate reptiles. Evolution. 2006;60:123–141. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
