

History and Evolution of Spinal Robotics in Pediatric Spinal Deformity
- PMID: 34675031
- PMCID: PMC8532531
- DOI: 10.14444/8141
History and Evolution of Spinal Robotics in Pediatric Spinal Deformity
Abstract
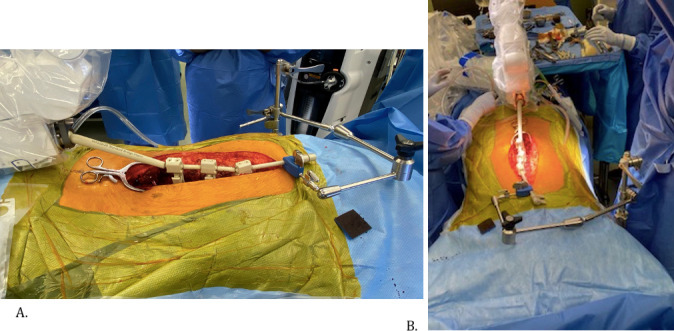
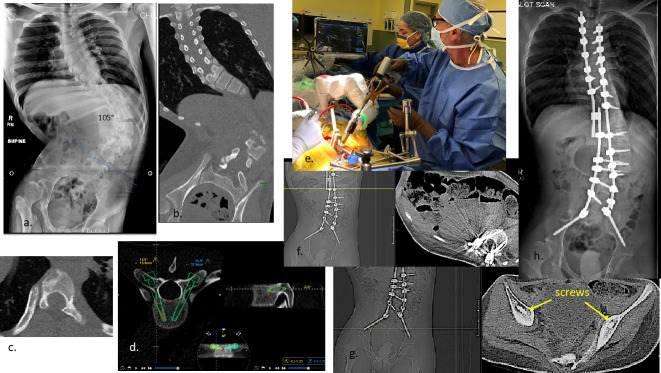
Robotic assistance in surgical procedures is a valuable tool that enhances the safety and efficacy of invasive surgeries. These devices are divided functionally into surgeon surrogates where the device operates under the direct control of an offsite surgeon, and surgeon adjuncts where the device is an intraoperative guidance tool used in a portion of the procedure. The current state of robotic spine surgery focuses on the latter, addressing the primary task of pedicle screw placement. We would like to share our experience with the Mazor Robotics devices to discuss the underlying concepts, strengths, weaknesses, and results as they pertain to pediatric spine deformity.
This manuscript is generously published free of charge by ISASS, the International Society for the Advancement of Spine Surgery. Copyright © 2021 ISASS.
Conflict of interest statement
Figures

References
-
- Shoham M, Lieberman IH, Benzel EC, et al. Robotic assisted spinal surgery—from concept to clinical practice. Comput Aided Surg. 2007;12(2):105–115. - PubMed
-
- Devito DP, Kaplan L, Dietl R, et al. Clinical acceptance and accuracy assessment of spinal implants guided with SpineAssist surgical robot: retrospective study. Spine. 2010;35(24):2109–2115. - PubMed
-
- Gertzbein SD, Robbins SE. Accuracy of pedicle screw placement in vivo. Spine. 1990;15(1):11–14. - PubMed
-
- Togawa D, Kayanja MM, Reinhardt MK, et al. Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: part 2 evaluation of system accuracy. Neurosurgery. 2007;60(2 suppl 1):129–139. - PubMed
LinkOut - more resources
Full Text Sources