

Fatigue Detection with Spatial-Temporal Fusion Method on Covariance Manifolds of Electroencephalography
- PMID: 34682022
- PMCID: PMC8534373
- DOI: 10.3390/e23101298
Fatigue Detection with Spatial-Temporal Fusion Method on Covariance Manifolds of Electroencephalography
Abstract
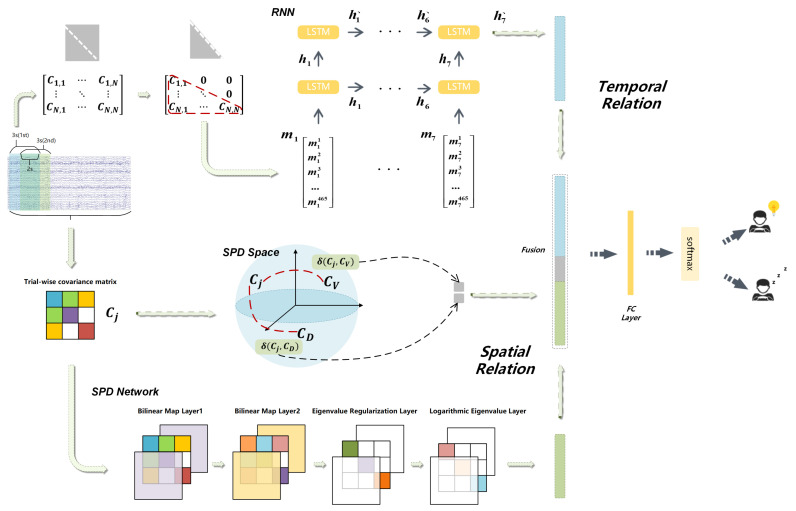
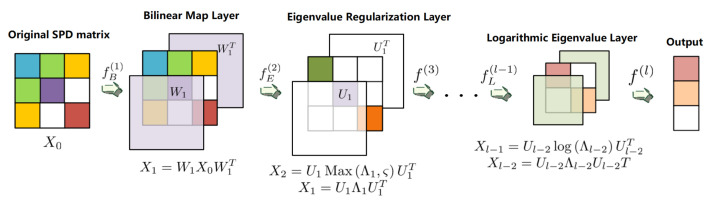
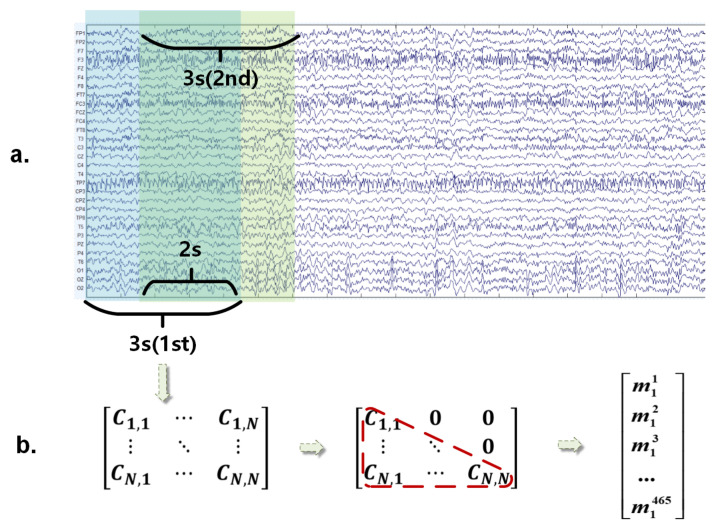
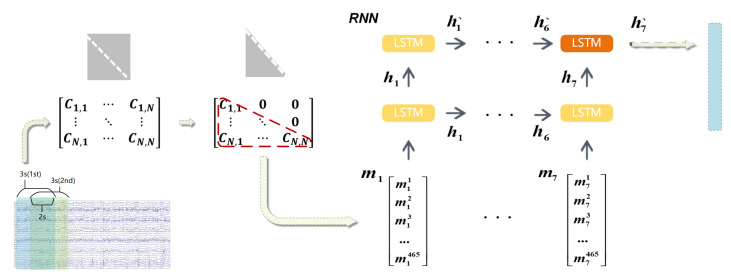
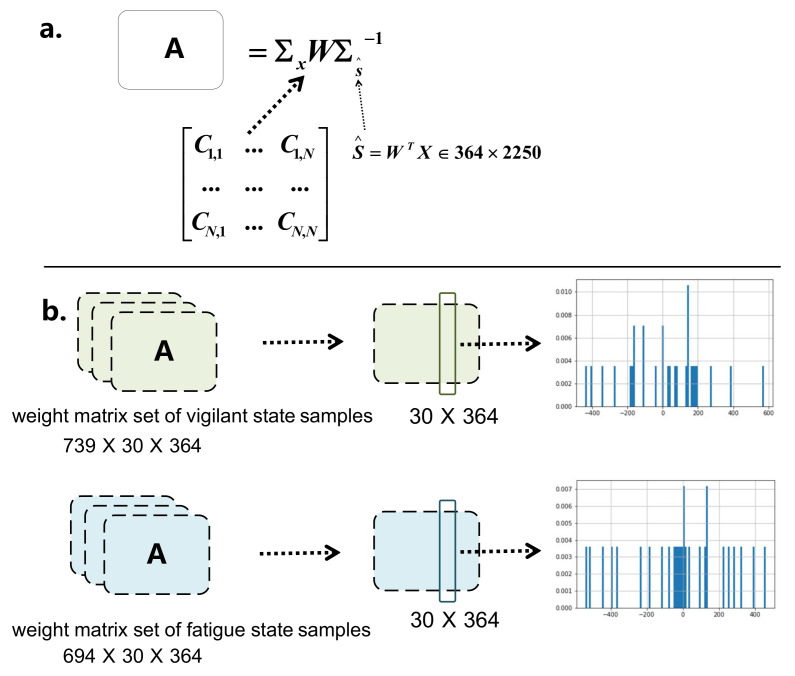
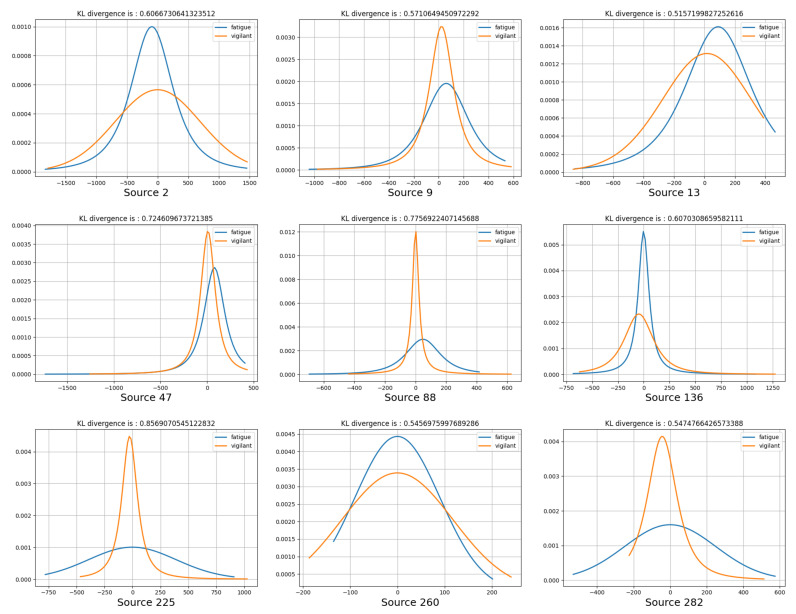
With the increasing pressure of current life, fatigue caused by high-pressure work has deeply affected people and even threatened their lives. In particular, fatigue driving has become a leading cause of traffic accidents and deaths. This paper investigates electroencephalography (EEG)-based fatigue detection for driving by mining the latent information through the spatial-temporal changes in the relations between EEG channels. First, EEG data are partitioned into several segments to calculate the covariance matrices of each segment, and then we feed these matrices into a recurrent neural network to obtain high-level temporal information. Second, the covariance matrices of whole signals are leveraged to extract two kinds of spatial features, which will be fused with temporal characteristics to obtain comprehensive spatial-temporal information. Experiments on an open benchmark showed that our method achieved an excellent classification accuracy of 93.834% and performed better than several novel methods. These experimental results indicate that our method enables better reliability and feasibility in the detection of fatigued driving.
Keywords: RNN; SPDNet; covariance matrices; electroencephalography; fatigue detection; stein divergence.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Spatial-Temporal EEG Fusion Based on Neural Network for Major Depressive Disorder Detection.Interdiscip Sci. 2023 Dec;15(4):542-559. doi: 10.1007/s12539-023-00567-x. Epub 2023 May 4. Interdiscip Sci. 2023. PMID: 37140772 Free PMC article.
-
Sleep stage classification using covariance features of multi-channel physiological signals on Riemannian manifolds.Comput Methods Programs Biomed. 2019 Sep;178:19-30. doi: 10.1016/j.cmpb.2019.06.008. Epub 2019 Jun 10. Comput Methods Programs Biomed. 2019. PMID: 31416548
-
Self-Attentive Channel-Connectivity Capsule Network for EEG-Based Driving Fatigue Detection.IEEE Trans Neural Syst Rehabil Eng. 2023;31:3152-3162. doi: 10.1109/TNSRE.2023.3299156. Epub 2023 Aug 7. IEEE Trans Neural Syst Rehabil Eng. 2023. PMID: 37494165
-
Review of Riemannian Distances and Divergences, Applied to SSVEP-based BCI.Neuroinformatics. 2021 Jan;19(1):93-106. doi: 10.1007/s12021-020-09473-9. Neuroinformatics. 2021. PMID: 32562187 Review.
-
[Review of driver fatigue/drowsiness detection methods].Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2007 Feb;24(1):245-8. Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2007. PMID: 17333932 Review. Chinese.
Cited by
-
A multidimensional adaptive transformer network for fatigue detection.Cogn Neurodyn. 2025 Dec;19(1):43. doi: 10.1007/s11571-025-10224-2. Epub 2025 Feb 20. Cogn Neurodyn. 2025. PMID: 39991017
References
-
- Li D.H., Liu Q., Yuan W., Liu H.X. Relationship between fatigue driving and traffic accident. J. Traffic Transp. Eng. (Xi’an Shaanxi) 2010;10:104–109.
Grants and funding
LinkOut - more resources
Full Text Sources
